You might also like
- PICTOR v3Document1 pagePICTOR v3mychelfNo ratings yet
- Atmega328 Based Circuit Diagram of The ProjectDocument1 pageAtmega328 Based Circuit Diagram of The ProjectKav Mav100% (2)
- 738512Document1 page738512AlexandreNo ratings yet
- Delabs Circuits and Technologies: VI VODocument1 pageDelabs Circuits and Technologies: VI VOagus100% (1)
- 344 Mach Chuyen Doi Rs232 To Rs485 Cho PC, Board (Nguyen Gia Minh Thao)Document1 page344 Mach Chuyen Doi Rs232 To Rs485 Cho PC, Board (Nguyen Gia Minh Thao)Quang Linh Lê100% (1)
- Wiring KeseluruhanDocument1 pageWiring KeseluruhanYuliana Risa50% (2)
- 1 2 3 4 5 6 7 P0 9 !P0 10 P1 11 RES 12 13 Q8 14 15: New SchematicDocument1 page1 2 3 4 5 6 7 P0 9 !P0 10 P1 11 RES 12 13 Q8 14 15: New SchematicranjithNo ratings yet
- EsquematicoDocument1 pageEsquematicoChango FontanaNo ratings yet
- PDF Created With Fineprint Pdffactory Trial Version: ZoudangDocument1 pagePDF Created With Fineprint Pdffactory Trial Version: ZoudangIgor MNo ratings yet
- Aiken Zen Er CT DropDocument1 pageAiken Zen Er CT DropequisNo ratings yet
- Schematic - DIY Three Phase Rectifier Circuit - Sheet - 1 - 20190926091525 PDFDocument1 pageSchematic - DIY Three Phase Rectifier Circuit - Sheet - 1 - 20190926091525 PDFcriman45No ratings yet
- Schematic - DIY Three Phase Rectifier Circuit - Sheet - 1 - 20190926091525Document1 pageSchematic - DIY Three Phase Rectifier Circuit - Sheet - 1 - 20190926091525criman45No ratings yet
- Schematic DIY Three Phase Rectifier Circuit Sheet 1 20190926091525Document1 pageSchematic DIY Three Phase Rectifier Circuit Sheet 1 20190926091525Manolo PerezNo ratings yet
- MachdoduongDocument1 pageMachdoduongapi-3843101100% (2)
- Mod Dimmer 5A 2LDocument1 pageMod Dimmer 5A 2LRazwan ali saeedNo ratings yet
- 逆变直流升压Document1 page逆变直流升压何青No ratings yet
- Hernandez Villa Romeo Tarea 19Document4 pagesHernandez Villa Romeo Tarea 19Romeo Hernandez VillaNo ratings yet
- Schematic - PWM DC Motor Speed Controller - 2023-01-06Document1 pageSchematic - PWM DC Motor Speed Controller - 2023-01-06PrernaaNo ratings yet
- Previo 07 CompletoDocument2 pagesPrevio 07 CompletoRomeo Hernandez VillaNo ratings yet
- Schematic - LM358 AKÜ ŞARJ DEVRESİ - 2021-10-18Document1 pageSchematic - LM358 AKÜ ŞARJ DEVRESİ - 2021-10-18Med SamiNo ratings yet
- Mach Dieu Khien May Quan DayDocument1 pageMach Dieu Khien May Quan DayAn VinhNo ratings yet
- PWM 5a SCHDocument1 pagePWM 5a SCHNgọc Hưng TạNo ratings yet
- Mach Dieu Khien Toc Do Dong Co: OUT CV THR DSCHGDocument3 pagesMach Dieu Khien Toc Do Dong Co: OUT CV THR DSCHGthuhaui100% (1)
- 1/18/2021 8:04:10 PM C:/Users/Hungpham/Desktop/Module PWM/PWM Eagle - SCH (Sheet: 1/1)Document1 page1/18/2021 8:04:10 PM C:/Users/Hungpham/Desktop/Module PWM/PWM Eagle - SCH (Sheet: 1/1)Manaila VasileNo ratings yet
- PULSADORDocument1 pagePULSADORJose Carlos LoureiroNo ratings yet
- Nguyen LyDocument1 pageNguyen LyTường Minh Nguyễn100% (1)
- Uc 3843Document1 pageUc 3843Nam TàoNo ratings yet
- Uc 3843 PDFDocument1 pageUc 3843 PDFNam TàoNo ratings yet
- PDF Created With Fineprint Pdffactory Trial Version: ZoudangDocument1 pagePDF Created With Fineprint Pdffactory Trial Version: ZoudangNguyen Nguyễn Phương LinhNo ratings yet
- SIM900 (Imran)Document1 pageSIM900 (Imran)TALENT TRICKS TechnologiesNo ratings yet
- Injector Tester - PDSPRJDocument1 pageInjector Tester - PDSPRJYusufNo ratings yet
- Power Manag 61Document1 pagePower Manag 61azqNo ratings yet
- Double Muff (EC2010)Document1 pageDouble Muff (EC2010)mark fakundinyNo ratings yet
- CHAVEHS10Document1 pageCHAVEHS10Martinho De Oliveira CotaNo ratings yet
- DC-DC Step Down On XL4016Document1 pageDC-DC Step Down On XL4016Raghu Vutukuru100% (3)
- CircuitDocument1 pageCircuitreemth255No ratings yet
- Medidor Esr A Transistores: Title: Rev: Date: Sheet: Easyeda V4.11.9 Drawn byDocument1 pageMedidor Esr A Transistores: Title: Rev: Date: Sheet: Easyeda V4.11.9 Drawn byMemoPalacioNo ratings yet
- Medidor Esr A Transistores: Title: Rev: Date: Sheet: Easyeda V4.11.9 Drawn byDocument1 pageMedidor Esr A Transistores: Title: Rev: Date: Sheet: Easyeda V4.11.9 Drawn byManos MagicasNo ratings yet
- Medidor Esr A Transistores: Title: Rev: Date: Sheet: Easyeda V4.11.9 Drawn byDocument1 pageMedidor Esr A Transistores: Title: Rev: Date: Sheet: Easyeda V4.11.9 Drawn byMemoPalacioNo ratings yet
- Schematic PrintsDocument1 pageSchematic PrintsDân Kỹ Thuật100% (1)
- DIRT Schematic 2.2Document1 pageDIRT Schematic 2.2Edward JonesNo ratings yet
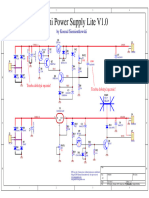
- Muzgaudio HV Semi Ps Lite v3Document1 pageMuzgaudio HV Semi Ps Lite v3slobodan.jovanovic.jaNo ratings yet
- AutoPower-Auto PowerDocument1 pageAutoPower-Auto PowerDanut StanciuNo ratings yet
- Fender SP-10 SchematicDocument1 pageFender SP-10 SchematicZL2ABV50% (4)
- 7812TV Ic1: 1 Vi 1 Vo 3 GNDDocument1 page7812TV Ic1: 1 Vi 1 Vo 3 GNDAnonymous 4aChpF1hZNo ratings yet
- 24bit2 AdcDocument1 page24bit2 AdcKishore PagarNo ratings yet
- Battert MainDocument1 pageBattert Mainapi-3730505100% (1)
- Schematic - TRANSMISOR DE ONDAS - 2022-10-13Document1 pageSchematic - TRANSMISOR DE ONDAS - 2022-10-13gerson sanchez pimentelNo ratings yet
- Ref SchematicDocument1 pageRef Schematiczathya dark100% (1)
- Component Ratings: Reflow & Lamp ControllerDocument1 pageComponent Ratings: Reflow & Lamp ControllerKeith Dobbelaere100% (4)
- Bluetooth Home Prototype AutomationDocument1 pageBluetooth Home Prototype AutomationAvanish Srivastava100% (2)
- Kaloka SPK Protect V1.22 - SCHDocument1 pageKaloka SPK Protect V1.22 - SCHpick lloko o balanço do forró,No ratings yet
- Class D IR2110 SCHDocument1 pageClass D IR2110 SCHMr.Mongkhon J.No ratings yet
- Schematic 24Vdc UPS v1.1Document1 pageSchematic 24Vdc UPS v1.1Nuaman SaghirNo ratings yet
- GPS1.0 SCHDocument1 pageGPS1.0 SCHMukhiturrusda100% (2)
- Power 2Document1 pagePower 2Chandana KarunapalaNo ratings yet
- Schematic - Power 6w - 2020-06-24 - 15-16-48Document1 pageSchematic - Power 6w - 2020-06-24 - 15-16-48Jorge Sá de OliveiraNo ratings yet
- Trafo Tester Schematics-2Document4 pagesTrafo Tester Schematics-2Chandana KarunapalaNo ratings yet
- Electronic Components and Laboratory EquipmentDocument10 pagesElectronic Components and Laboratory EquipmentKenneth SablayNo ratings yet
- Triple-Band Combiner: 880 - 960 MHZ 1710 - 1880 MHZ 1920 - 2170 MHZDocument2 pagesTriple-Band Combiner: 880 - 960 MHZ 1710 - 1880 MHZ 1920 - 2170 MHZFLM Tarnovo100% (1)
- NX-3000 Series: User ManualDocument70 pagesNX-3000 Series: User ManualJulio Cesar Huachaca RodriguezNo ratings yet
- User Guide: Professional Audio Equipment CMX700 Series Mini Clip-On Ear MicrophoneDocument2 pagesUser Guide: Professional Audio Equipment CMX700 Series Mini Clip-On Ear MicrophoneS.M. INJAMULNo ratings yet
- EE Curriculum SheetDocument2 pagesEE Curriculum SheetEmilie OlssonNo ratings yet
- Final Year Project Report Chapter 1,2Document13 pagesFinal Year Project Report Chapter 1,2Dhanush NNo ratings yet
- 3 - MotherboardDocument41 pages3 - MotherboardMe RylleNo ratings yet
- ETAK1700FEOJR PT enDocument6 pagesETAK1700FEOJR PT enVasile Ciprian DavidNo ratings yet
- Liebert LTS AP12-PWR-LTSV2-BRDocument2 pagesLiebert LTS AP12-PWR-LTSV2-BRvinNo ratings yet
- RD Dcu Digital Card UnitDocument2 pagesRD Dcu Digital Card UnitАнатолий РябухаNo ratings yet
- DHI ASL8112X W - DatasheetDocument2 pagesDHI ASL8112X W - DatasheetLeonel cadenas hernandezNo ratings yet
- Premier Quatro 4 Loop Analogue Addressable Fire Alarm Panel: FeaturesDocument2 pagesPremier Quatro 4 Loop Analogue Addressable Fire Alarm Panel: FeaturesmotaNo ratings yet
- CD73 Compact Disc Player: Service ManualDocument13 pagesCD73 Compact Disc Player: Service ManualeduardNo ratings yet
- Complete Electrical Theory & Design CalculationsDocument2 pagesComplete Electrical Theory & Design Calculationssalito mazaNo ratings yet
- IEEE - C136.27 - 1996 Roadway and Tunnel Lighting EquipmentDocument10 pagesIEEE - C136.27 - 1996 Roadway and Tunnel Lighting EquipmentSamir MukhtarNo ratings yet
- Irs2092 Product InfoDocument17 pagesIrs2092 Product InfoAnderson LuizNo ratings yet
- Solar Operations and Maintenance: 550 KW CF Aguilar Rice MillDocument27 pagesSolar Operations and Maintenance: 550 KW CF Aguilar Rice MillAngelo Mark Ordoña PorgatorioNo ratings yet
- Electronics RegularDocument169 pagesElectronics RegularNazeerNo ratings yet
- Steval Mki062v2 SchematicDocument2 pagesSteval Mki062v2 Schematicd280299No ratings yet
- Electric Leads: G Nuovo PignoneDocument4 pagesElectric Leads: G Nuovo Pignonecvg ertdNo ratings yet
- chp1 BlackbookDocument81 pageschp1 Blackbook121 Divyanshu SoradiyaNo ratings yet
- Voice Controlled Robot Through AndroidDocument103 pagesVoice Controlled Robot Through Androidsamar0% (1)
- High Speed Protection Scheme For Traction OHE of 25 KV AC Indian Railway SystemDocument8 pagesHigh Speed Protection Scheme For Traction OHE of 25 KV AC Indian Railway Systemrajesh kannanNo ratings yet
- T3 Tech SpecDocument4 pagesT3 Tech SpecAguz WibowoNo ratings yet
- Concepts Engineering: ApplicationsDocument11 pagesConcepts Engineering: ApplicationsGS AryaNo ratings yet
- DSE3110 Installation InstructionsDocument2 pagesDSE3110 Installation InstructionsInversiones Viva Seguro86% (7)
- SCE27. .IoT Based Real-Time Residential Energy MeterDocument3 pagesSCE27. .IoT Based Real-Time Residential Energy MeterCrispNo ratings yet
- Classifications of Chopper (Suha Dalaf)Document28 pagesClassifications of Chopper (Suha Dalaf)noor deenNo ratings yet
- Low Voltage Alternator - 4 Pole: 410 To 660 kVA - 50 HZ / 510 To 825 kVA - 60 HZ Electrical and Mechanical DataDocument12 pagesLow Voltage Alternator - 4 Pole: 410 To 660 kVA - 50 HZ / 510 To 825 kVA - 60 HZ Electrical and Mechanical DataMohamedOsmanNo ratings yet
- 42LF20FRDocument28 pages42LF20FRkanakNo ratings yet