You might also like
- Practical Grounding, Bonding, Shielding and Surge ProtectionFrom EverandPractical Grounding, Bonding, Shielding and Surge ProtectionRating: 4 out of 5 stars4/5 (15)
- 1 RCS-985B Generator Protection Instruction Manual PDFDocument473 pages1 RCS-985B Generator Protection Instruction Manual PDFM ANNAS ALBAB FAUZI100% (1)
- Kbic ManualDocument28 pagesKbic ManualArturo TerrazasNo ratings yet
- Combivert: Installation Guide & Operation Manual D-Housing 1-5 HP 230V 1 - 10 HP 480V B Control C Control G ControlDocument52 pagesCombivert: Installation Guide & Operation Manual D-Housing 1-5 HP 230V 1 - 10 HP 480V B Control C Control G ControlAhmet KayurNo ratings yet
- Solar Boost SB2000E ManualDocument15 pagesSolar Boost SB2000E ManualSipikNo ratings yet
- Eaton 9PXM Userguide 164000669Document130 pagesEaton 9PXM Userguide 164000669johnNo ratings yet
- BC138-139 User ManualDocument16 pagesBC138-139 User ManuallalociscoNo ratings yet
- Solar Boost™ 2000E: 25amp 12Vdc Maximum Power Point Tracking Photovoltaic Charge ControllerDocument11 pagesSolar Boost™ 2000E: 25amp 12Vdc Maximum Power Point Tracking Photovoltaic Charge ControllerMike JablonskiNo ratings yet
- REJ603 UserManualDocument56 pagesREJ603 UserManualAsai ThambiNo ratings yet
- Sigineer Power M3048BP M5000H 48BP Solar Inverter Manual 202112122Document55 pagesSigineer Power M3048BP M5000H 48BP Solar Inverter Manual 202112122mitchel taylorNo ratings yet
- QS1 Micro MaualDocument27 pagesQS1 Micro MaualAndres MendozaNo ratings yet
- SG 60 KTLDocument104 pagesSG 60 KTLadjiNo ratings yet
- REJ603 Um 1MDU07206-YN ENdDocument56 pagesREJ603 Um 1MDU07206-YN ENdMarian AriciucNo ratings yet
- iPower 3000 Energy Storage Inverter Instruction ManualDocument52 pagesiPower 3000 Energy Storage Inverter Instruction ManualluigigerulaNo ratings yet
- MGE Galaxy 4000Document24 pagesMGE Galaxy 4000Rafael HernandezNo ratings yet
- LS800 eDocument124 pagesLS800 eNguyễn Bá ThịnhNo ratings yet
- Advanced Energy - MinilinerDocument172 pagesAdvanced Energy - MinilinerRodrigo MoretonNo ratings yet
- Icontrol AC Rel 3 4 42-02-2223 B5Document414 pagesIcontrol AC Rel 3 4 42-02-2223 B5ElputoAmo XDNo ratings yet
- Dynamic Braking OptionsDocument28 pagesDynamic Braking OptionsGersson AChNo ratings yet
- IControl AC Release 3Document414 pagesIControl AC Release 3Giamfranco VillarrealNo ratings yet
- Installation / User Manual: Apsystems Yc600B MicroinverterDocument25 pagesInstallation / User Manual: Apsystems Yc600B MicroinverterHenry Johan Ramirez PereiraNo ratings yet
- Transformer Based Off Grid Solar Inverter Charger User's ManualDocument39 pagesTransformer Based Off Grid Solar Inverter Charger User's Manualjoseph mendez100% (1)
- Variador Reliance NruDocument440 pagesVariador Reliance Nruzc4mrnykrcNo ratings yet
- Dda0p0 M Fe1Document1,164 pagesDda0p0 M Fe1Hritcu IulianNo ratings yet
- Benshaw Softstart RX2 ManualDocument222 pagesBenshaw Softstart RX2 Manualtmarchini8782100% (2)
- Control Generador Easy GenDocument69 pagesControl Generador Easy GenDanny SánchezNo ratings yet
- AC Motor Drive VFD-MDocument173 pagesAC Motor Drive VFD-MMilton Dario villotaNo ratings yet
- Instructions For Vacuum Circuit Breaker Type Abb R-Mag (OVB-DCM) 15.5 KV 1250/2000/3000 ADocument56 pagesInstructions For Vacuum Circuit Breaker Type Abb R-Mag (OVB-DCM) 15.5 KV 1250/2000/3000 AFilipe BrandaoNo ratings yet
- PCM-875 Plasma Arc Cutting Package: Instruction ManualDocument48 pagesPCM-875 Plasma Arc Cutting Package: Instruction ManualcostelchelariuNo ratings yet
- Operating Manual: SUNNY TRIPOWER 20000TL / 25000TLDocument52 pagesOperating Manual: SUNNY TRIPOWER 20000TL / 25000TLprekNo ratings yet
- Rapid Shutdown Product Manual BCG.00884.0AP revACDocument36 pagesRapid Shutdown Product Manual BCG.00884.0AP revACmarkmarkchanchan0902No ratings yet
- Cybex 5 Series TreadmillDocument80 pagesCybex 5 Series TreadmillAlfonzo OrozcoNo ratings yet
- Eaton 9155 Ups User Guide Manual 164201553Document104 pagesEaton 9155 Ups User Guide Manual 164201553JonathanRodriguezNo ratings yet
- SG2.0 2.5 3.0RS-S 3.0 3.6 4.0 5.0 6.0RS-User-Manual-V14-202109Document101 pagesSG2.0 2.5 3.0RS-S 3.0 3.6 4.0 5.0 6.0RS-User-Manual-V14-202109Mayhara CoelhoNo ratings yet
- Commander SK: Getting Started GuideDocument52 pagesCommander SK: Getting Started GuideAshraf E. YacoubNo ratings yet
- GM-4000F/X1R/EW Service ManualDocument24 pagesGM-4000F/X1R/EW Service ManualMiguel FloresNo ratings yet
- WWSPMDocument49 pagesWWSPMAndrea CupelloNo ratings yet
- DPG-2201-00X Digital Controllers: User ManualDocument50 pagesDPG-2201-00X Digital Controllers: User ManualPatrick CreighNo ratings yet
- 1502 Um052d en P Dec09Document56 pages1502 Um052d en P Dec09Juan Cristobal Rivera PuellesNo ratings yet
- CP Pws Manual 6Document22 pagesCP Pws Manual 6Padmajan YesodharanNo ratings yet
- WEG ADL300 Quick Start Up Guide 1S9QSEN enDocument142 pagesWEG ADL300 Quick Start Up Guide 1S9QSEN enরেজাউল ইসলাম রাজNo ratings yet
- SG125HV V1 UEN Ver14 202002Document106 pagesSG125HV V1 UEN Ver14 202002MaruNo ratings yet
- Manual J1000Document260 pagesManual J1000Jose Luis CaballeroNo ratings yet
- Inverter PH Smart VE Direct and SUN-EnDocument31 pagesInverter PH Smart VE Direct and SUN-EnventerhermanjNo ratings yet
- SCRDocument36 pagesSCRJuan Antonio Rodriguez Meza100% (1)
- PVI-6000-OUTD-US Manual PDFDocument94 pagesPVI-6000-OUTD-US Manual PDFIoan NovacNo ratings yet
- Intellivac™ Contactor Control Module: Bulletin 1503VcDocument44 pagesIntellivac™ Contactor Control Module: Bulletin 1503VcAbel Hernandez RamirezNo ratings yet
- AC Motor Drive VFD-EL PDFDocument209 pagesAC Motor Drive VFD-EL PDFIzaque Maximo PereiraNo ratings yet
- Abm Manual PDCDocument175 pagesAbm Manual PDCvdweert80% (5)
- GV3000/SE AC Drive: Hardware Reference, Installation, and Troubleshooting Manual D2-3360-6Document128 pagesGV3000/SE AC Drive: Hardware Reference, Installation, and Troubleshooting Manual D2-3360-6Nguyen Hai DangNo ratings yet
- ArmorStart 280D Um004 - en PDocument320 pagesArmorStart 280D Um004 - en PВиталий ШеленковNo ratings yet
- VM600 General Inverter V03-20211227053659974Document30 pagesVM600 General Inverter V03-20211227053659974SaanounNo ratings yet
- Operating Manual: SUNNY TRIPOWER 20000TL / 25000TLDocument50 pagesOperating Manual: SUNNY TRIPOWER 20000TL / 25000TLakbar installNo ratings yet
- Service Manual Bizhub 501Document1,028 pagesService Manual Bizhub 501Hasan SaputraNo ratings yet
- Ix T7A: Installation ManualDocument28 pagesIx T7A: Installation ManualSidney Chaves de LimaNo ratings yet
- Bc141 Baldor Manual EspañolDocument20 pagesBc141 Baldor Manual Españoljohn kenneth vasquez vasquez100% (1)
- Xerox XD100 102 104 Service ManualDocument308 pagesXerox XD100 102 104 Service ManualatalincNo ratings yet
- Eacon Inv Ec500Document74 pagesEacon Inv Ec500michalis zisisNo ratings yet
- Egcp2-Gcp-Lsim Load Share Interface Module: ManualDocument21 pagesEgcp2-Gcp-Lsim Load Share Interface Module: ManualCHO SHENG TIONGNo ratings yet
- Parker 590P Series Product ManualDocument545 pagesParker 590P Series Product ManualRabah BaloulNo ratings yet
- Gambar Rangkaian Bak Lem Binding TSKDocument1 pageGambar Rangkaian Bak Lem Binding TSKsetyo wibowoNo ratings yet
- ITOTEC - 115Z - Operation Manual (Applied)Document88 pagesITOTEC - 115Z - Operation Manual (Applied)18-424 Ganesh KotaNo ratings yet
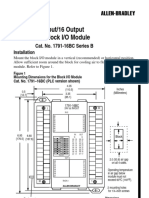
- 16 Input/16 Output DC Block I/O Module: 1791-16BC SpecificationsDocument12 pages16 Input/16 Output DC Block I/O Module: 1791-16BC Specificationssetyo wibowoNo ratings yet
- Doosan Dx140Document114 pagesDoosan Dx140Trọng100% (3)
- Signet 9900 Manual InstructionDocument64 pagesSignet 9900 Manual InstructionHearnfar99No ratings yet
- GE - M60 Motor Relay - ManualDocument382 pagesGE - M60 Motor Relay - ManualKrishnan GovindarajNo ratings yet
- QuadDocument14 pagesQuadnprashanNo ratings yet
- 389 - R10 - Moni 200H eDocument4 pages389 - R10 - Moni 200H eJohn Arllan DiestroNo ratings yet
- Ansi 37.2Document4 pagesAnsi 37.2octofantemNo ratings yet
- Security: Workshop ManualDocument130 pagesSecurity: Workshop Manualjrrodrigueza2No ratings yet
- L9911ADocument15 pagesL9911Amar_barudjNo ratings yet
- Hyd 966MDocument11 pagesHyd 966MRODRIGO HERNANDEZNo ratings yet
- Busworks 900Mb Series Modbus-Rtu I/ODocument23 pagesBusworks 900Mb Series Modbus-Rtu I/OOmar RobaNo ratings yet
- Unigen Load Sharing ModuleDocument15 pagesUnigen Load Sharing ModuleKrishna PardeshiNo ratings yet
- CA62 Manual Instalare ENGDocument76 pagesCA62 Manual Instalare ENGPirlac DanNo ratings yet
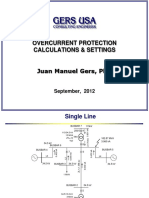
- Chapter 5-Overcurrent Protection Calculations & Settings - Tutorial PDFDocument21 pagesChapter 5-Overcurrent Protection Calculations & Settings - Tutorial PDFadriancoello50% (2)
- K8AB Monitoring Relay DatasheetDocument38 pagesK8AB Monitoring Relay DatasheetSheila Rose Bacerra-VillafloresNo ratings yet
- Hac - Heater & Air Conditioning Control SystemDocument301 pagesHac - Heater & Air Conditioning Control SystemLeonardoNo ratings yet
- IGFR-5: Ground Fault Relay With Adjustable Time Delay Part Number: 1100-0105Document4 pagesIGFR-5: Ground Fault Relay With Adjustable Time Delay Part Number: 1100-0105Brandon Bryan Gomez RodriguezNo ratings yet
- MB 100Document12 pagesMB 100dearonNo ratings yet
- Micom p127 Modbus TableDocument616 pagesMicom p127 Modbus TableUlaş DoğruNo ratings yet
- 2001 Honda Civic RepairDocument2,904 pages2001 Honda Civic RepairRogérioFreitas100% (4)
- Under Reach of Distance Relay - Electrical ConceptsDocument16 pagesUnder Reach of Distance Relay - Electrical ConceptsDevanrajNo ratings yet
- Ain Shams Engineering Journal Study on Protection Coordination Improvement Using Unidirectional Fault Current LimiterDocument10 pagesAin Shams Engineering Journal Study on Protection Coordination Improvement Using Unidirectional Fault Current LimiterFERDINADNo ratings yet
- Electrovane FiltreDocument39 pagesElectrovane FiltrepvflorinNo ratings yet
- Centrifugal Chiller Maintenance ChecklistDocument1 pageCentrifugal Chiller Maintenance Checklistosama alabsiNo ratings yet
- M.I.E.T. Engineering College Course on Protection and SwitchgearDocument126 pagesM.I.E.T. Engineering College Course on Protection and SwitchgearshreeNo ratings yet
- Elc 12Document3 pagesElc 12Luis Martín CastroNo ratings yet
- UP5-4 UP5-5.5 UP5-7.5 UP5-15c Parts 80445265 Oct 2008Document108 pagesUP5-4 UP5-5.5 UP5-7.5 UP5-15c Parts 80445265 Oct 2008JoeNo ratings yet
- PLC User Manual: GSK980TD Turning CNCDocument166 pagesPLC User Manual: GSK980TD Turning CNCAlbertoQuezadaNo ratings yet
- Timer Instruction ManualDocument4 pagesTimer Instruction Manualjohari johariNo ratings yet
- SafeLink CB Product CatalogDocument64 pagesSafeLink CB Product CatalogVan LightNo ratings yet
- STP-CB 3/5 3 Phase Motor Control Panel Wiring Diagram (For Non-Hazardous, Indoor Use Only)Document2 pagesSTP-CB 3/5 3 Phase Motor Control Panel Wiring Diagram (For Non-Hazardous, Indoor Use Only)IverNo ratings yet