You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Linear Classification: 1 1 N N I D IDocument33 pagesLinear Classification: 1 1 N N I D ISNo ratings yet
- Nonparametric Classification ExplainedDocument20 pagesNonparametric Classification ExplainedSNo ratings yet
- Statistical Learning Theory Binary ClassificationDocument4 pagesStatistical Learning Theory Binary ClassificationNCT DreamNo ratings yet
- Statistical Learning Theory: 18.657: Mathematics of Machine LearningDocument9 pagesStatistical Learning Theory: 18.657: Mathematics of Machine LearningMega Silvia HasugianNo ratings yet
- Lagrange IntepolationDocument10 pagesLagrange IntepolationceanilNo ratings yet
- EE5143 Problem Set 1 practice problemsDocument4 pagesEE5143 Problem Set 1 practice problemsSarthak VoraNo ratings yet
- Ejercicios de Métodos de Reconstrución de Imágenes de TC - Hoja 1Document3 pagesEjercicios de Métodos de Reconstrución de Imágenes de TC - Hoja 1antonioNo ratings yet
- ExpectationDocument19 pagesExpectationShah FahadNo ratings yet
- Lec38 - 210108071 - AKSHAY KUMAR JHADocument12 pagesLec38 - 210108071 - AKSHAY KUMAR JHAvasu sainNo ratings yet
- Random Variable Modified PDFDocument19 pagesRandom Variable Modified PDFIMdad HaqueNo ratings yet
- Comp Numerical Analysis ProblemsDocument7 pagesComp Numerical Analysis Problemskooobeng6No ratings yet
- Independent Random Variables Review and ExamplesDocument34 pagesIndependent Random Variables Review and ExamplesAntonio JNo ratings yet
- CS 725: Foundations of Machine Learning: Lecture 2. Overview of Probability Theory For MLDocument23 pagesCS 725: Foundations of Machine Learning: Lecture 2. Overview of Probability Theory For MLAnonymous d0rFT76BNo ratings yet
- Generalized Linear Models: FX Axb C DX Axb C DXDocument11 pagesGeneralized Linear Models: FX Axb C DX Axb C DXAishat OmotolaNo ratings yet
- S1B 16 All LecturesDocument221 pagesS1B 16 All LecturesSaumya GuptaNo ratings yet
- Advanced Mathematical Analysis: DraftDocument8 pagesAdvanced Mathematical Analysis: DraftParthasarathi MondalNo ratings yet
- Probability Concepts in SimulationDocument8 pagesProbability Concepts in SimulationHussein Turi HtgNo ratings yet
- CS236 Homework 1Document4 pagesCS236 Homework 1Raffael YasinNo ratings yet
- Probability and Stochastic Process 21Document12 pagesProbability and Stochastic Process 21tarungajjuwaliaNo ratings yet
- Opuscula Math 3205 PDFDocument8 pagesOpuscula Math 3205 PDFAntonio Torres PeñaNo ratings yet
- Estimation Theory PresentationDocument66 pagesEstimation Theory PresentationBengi Mutlu Dülek100% (1)
- Assignment 1: Probability : Partial SolutionDocument7 pagesAssignment 1: Probability : Partial SolutionVirda SetyaniNo ratings yet
- Modern Crypto 18 Homework 2 SolutionDocument5 pagesModern Crypto 18 Homework 2 Solutionعبدالله بحراويNo ratings yet
- (Some) Solutions For HW Set # 2Document3 pages(Some) Solutions For HW Set # 2Lokesh SinghNo ratings yet
- Section06 SolutionsDocument15 pagesSection06 SolutionsMuhammad asafNo ratings yet
- Rational FunctionsDocument7 pagesRational FunctionsNorhainy MacawadibNo ratings yet
- Homotopy of Paths and Fundamental GroupDocument28 pagesHomotopy of Paths and Fundamental GroupEduar CastañedaNo ratings yet
- Power Series SolutionsDocument48 pagesPower Series SolutionsAyanangshu ChakrabartyNo ratings yet
- Guide Random VariablesDocument6 pagesGuide Random VariablesEric VonFreemanNo ratings yet
- Discussion Notes 2-6Document3 pagesDiscussion Notes 2-6Mahbod Matt OlfatNo ratings yet
- Mathematical Problems and Solutions On Information TheoryDocument28 pagesMathematical Problems and Solutions On Information TheoryAlvi RownokNo ratings yet
- PSET-1 Sol PDFDocument3 pagesPSET-1 Sol PDFSarthak VoraNo ratings yet
- Þ 3.4 Hermite Interpolation: Find The) F (X), P' (X) F ' (X),, P (X) F (X) For All I 0, 1,, NDocument8 pagesÞ 3.4 Hermite Interpolation: Find The) F (X), P' (X) F ' (X),, P (X) F (X) For All I 0, 1,, NguyNo ratings yet
- TAYLOR SERIESDocument3 pagesTAYLOR SERIESIshvarya DNo ratings yet
- Sec 1-1Document10 pagesSec 1-1Metin DenizNo ratings yet
- Order StatisticsDocument3 pagesOrder StatisticsSiti ZirahraiNo ratings yet
- Chapter 3-2857Document8 pagesChapter 3-2857Kevin FontynNo ratings yet
- MAT205T: Probability Theory: S VijayakumarDocument72 pagesMAT205T: Probability Theory: S VijayakumarEDM19B015 THODETI CHINA BABUNo ratings yet
- Stat276 Chapter 6Document9 pagesStat276 Chapter 6Onetwothree Tube100% (2)
- EntropyDocument21 pagesEntropyGyana Ranjan MatiNo ratings yet
- Statistics Assignment 3 SummaryDocument8 pagesStatistics Assignment 3 SummaryAnonymous na314kKjOANo ratings yet
- Notes On P-Adic NumberDocument13 pagesNotes On P-Adic NumberdmtriNo ratings yet
- CSD311: Artificial IntelligenceDocument33 pagesCSD311: Artificial IntelligenceAyaan KhanNo ratings yet
- Section06 SolutionsDocument11 pagesSection06 SolutionsKarimaNo ratings yet
- Polynomials J Ainsworth Dec21Document4 pagesPolynomials J Ainsworth Dec21Jason Wenxuan MIAONo ratings yet
- MA 207 TSC Power Series and Legendre PolynomialsDocument38 pagesMA 207 TSC Power Series and Legendre PolynomialsAnonymous SomeoneNo ratings yet
- NotesDocument39 pagesNotesomkar kumarNo ratings yet
- Numerical Methods in Mechanical Systems Course NotesDocument49 pagesNumerical Methods in Mechanical Systems Course NotesDaniela Mardini GonzálezNo ratings yet
- Num Interpolation 2Document25 pagesNum Interpolation 2Animesh MannaNo ratings yet
- ˆ β = (X X) X y: dyˆ i,i dyDocument7 pagesˆ β = (X X) X y: dyˆ i,i dyvishakhaNo ratings yet
- Geilo 2023 Monte Carlo PrerequisiteDocument9 pagesGeilo 2023 Monte Carlo PrerequisiteEMMANUEL SAMNo ratings yet
- Quals 2020Document3 pagesQuals 2020Anirban NathNo ratings yet
- Indicator functions and expected values explainedDocument10 pagesIndicator functions and expected values explainedPatricio Antonio VegaNo ratings yet
- Polynomials: Alexander RemorovDocument6 pagesPolynomials: Alexander Remorovmeoh eezaNo ratings yet
- Tuo Zhao NotesDocument47 pagesTuo Zhao NotesMarc RomaníNo ratings yet
- Formulae SheetDocument11 pagesFormulae Sheetthyanh.vuNo ratings yet
- 4 - Proof of Existance and Uniqueness of SolutionsDocument12 pages4 - Proof of Existance and Uniqueness of SolutionsNobody KnowsNo ratings yet
- SST 204 ModuleDocument84 pagesSST 204 ModuleAtuya Jones100% (1)
- Elements of Information Theory 2006 Thomas M. Cover and Joy A. ThomasDocument16 pagesElements of Information Theory 2006 Thomas M. Cover and Joy A. ThomasCamila LopesNo ratings yet
- Reverse Phrase Action Camera LightsDocument40 pagesReverse Phrase Action Camera LightsDINDO AzucenaNo ratings yet
- Petford & Atherton., 1996Document31 pagesPetford & Atherton., 1996Ivan Hagler Becerra VasquezNo ratings yet
- Lista Arancelaria EUADocument547 pagesLista Arancelaria EUAvilisbeth18No ratings yet
- Ceph Reference ArchitectureDocument12 pagesCeph Reference ArchitectureGermgmaan100% (1)
- HydrotherapyDocument52 pagesHydrotherapyMpt Sports100% (1)
- yudaturana,+Manajer+Jurnal,+dr +nelson+rev+2+ (162-172)Document12 pagesyudaturana,+Manajer+Jurnal,+dr +nelson+rev+2+ (162-172)Fath TiaraNo ratings yet
- Mitsubishi Motors: Service ManualDocument29 pagesMitsubishi Motors: Service ManualCristobalNo ratings yet
- Differential Equations CookbookDocument2 pagesDifferential Equations CookbookAugustinZNo ratings yet
- MidtermDocument3 pagesMidtermTrisha MondonedoNo ratings yet
- Radiological Investigations: UltrasonographyDocument42 pagesRadiological Investigations: UltrasonographyDeeptanu GhoshNo ratings yet
- Rules For The CertificationDocument84 pagesRules For The CertificationhdelriovNo ratings yet
- Collaboration Processes: Looking Inside the Black BoxDocument13 pagesCollaboration Processes: Looking Inside the Black Boxเข้าใจว่า น่าจะชื่อตุ้นNo ratings yet
- Lecture No.3 Part 1 (Fan)Document6 pagesLecture No.3 Part 1 (Fan)Mohsen HassanNo ratings yet
- CHS-WWW - Polsteel. TUBOS METALICOS PDFDocument3 pagesCHS-WWW - Polsteel. TUBOS METALICOS PDFEduardo TorreNo ratings yet
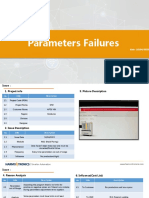
- SFM Issue Repor 15-4-2023Document3 pagesSFM Issue Repor 15-4-2023Esdras Fransua CisnerosNo ratings yet
- Proximity Sensing and Warning Technology For Heavy Construction Equipment OperationDocument10 pagesProximity Sensing and Warning Technology For Heavy Construction Equipment OperationAnand ReddyNo ratings yet
- Foreign Body Airway ObstructionDocument6 pagesForeign Body Airway ObstructionReeja RajeshNo ratings yet
- Model Question Paper and Solution 2022Document14 pagesModel Question Paper and Solution 2022R Y AnushNo ratings yet
- A Grammar of Anong Language Death Under Intense ContactDocument409 pagesA Grammar of Anong Language Death Under Intense ContacthaoyichuanNo ratings yet
- Wda 201Document72 pagesWda 201MoussaNo ratings yet
- Do Not Open This Booklet Until Told To Do So: Question Booklet Series: - Question Booklet No.Document7 pagesDo Not Open This Booklet Until Told To Do So: Question Booklet Series: - Question Booklet No.Rakesh KumawatNo ratings yet
- Violet Flame Clearing of The Heart ServiceDocument16 pagesViolet Flame Clearing of The Heart ServiceMySecret Gardenmdp82% (11)
- Cse Reviewer - MathDocument58 pagesCse Reviewer - MathLyne LerinNo ratings yet
- BAlochistanDocument14 pagesBAlochistanzee100% (1)
- Reles, Fuentes, Etc. Catalogo - ABBDocument452 pagesReles, Fuentes, Etc. Catalogo - ABBmpica100% (1)
- Cattlemans Steakhouse MenuDocument1 pageCattlemans Steakhouse Menuapi-300741654No ratings yet
- Explore the beaches and parks of Labuan IslandDocument2 pagesExplore the beaches and parks of Labuan IslandDudeNo ratings yet
- 11 - FORAGERS by Sam BoyerDocument106 pages11 - FORAGERS by Sam BoyerMurtaza HussainNo ratings yet
- Saej401v002 PDFDocument6 pagesSaej401v002 PDFLuis LujanoNo ratings yet
- Genética, Modificaciones y MutacionesDocument12 pagesGenética, Modificaciones y MutacionespokemaniacoplancheNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (54)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- 2084: Artificial Intelligence and the Future of HumanityFrom Everand2084: Artificial Intelligence and the Future of HumanityRating: 4 out of 5 stars4/5 (81)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- AI Money Machine: Unlock the Secrets to Making Money Online with AIFrom EverandAI Money Machine: Unlock the Secrets to Making Money Online with AINo ratings yet
- 100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesFrom Everand100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesNo ratings yet
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideFrom EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideRating: 5 out of 5 stars5/5 (1)
- How to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.From EverandHow to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.No ratings yet
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)