You might also like
- Rapid Prototyping Software for Avionics Systems: Model-oriented Approaches for Complex Systems CertificationFrom EverandRapid Prototyping Software for Avionics Systems: Model-oriented Approaches for Complex Systems CertificationNo ratings yet
- Energy-Efficient Multi-UAV-Enabled Multiaccess Edge Computing Incorporating NOMADocument15 pagesEnergy-Efficient Multi-UAV-Enabled Multiaccess Edge Computing Incorporating NOMAAnh Nhat NguyenNo ratings yet
- Multi-Task Offloading Scheme For UAV-enabled Fog Computing NetworksDocument16 pagesMulti-Task Offloading Scheme For UAV-enabled Fog Computing NetworksAli Asghar Pourhaji KazemNo ratings yet
- Analysis and Evaluation of Random Access Transmission For UAV-Assisted Vehicular-to-Infrastructure CommunicationsDocument14 pagesAnalysis and Evaluation of Random Access Transmission For UAV-Assisted Vehicular-to-Infrastructure CommunicationsZeeshan ShafiqNo ratings yet
- Communications and Control For Wireless Drone-Based Antenna ArrayDocument15 pagesCommunications and Control For Wireless Drone-Based Antenna ArraySyafiqah YazidNo ratings yet
- Design and Study of Data and Power Wireless Transfer System For UAVDocument6 pagesDesign and Study of Data and Power Wireless Transfer System For UAVrajaram huptaNo ratings yet
- Flying Ad-Hoc Networks (Fanets) : A Review of Communication Architectures, and Routing ProtocolsDocument10 pagesFlying Ad-Hoc Networks (Fanets) : A Review of Communication Architectures, and Routing Protocolspurushottam.k.mNo ratings yet
- Review of Communication Protocols For Fanets (Flying Ad-Hoc Networks)Document10 pagesReview of Communication Protocols For Fanets (Flying Ad-Hoc Networks)Jehanzeb KayaniNo ratings yet
- ModelingandAnalysisofUAV AssistedMobileNetworkwithImperfectBeam AlignmentDocument17 pagesModelingandAnalysisofUAV AssistedMobileNetworkwithImperfectBeam Alignmentgafari.loubnaNo ratings yet
- Abbreviated UAV Cloud Integration Proposal - (Katende Marvin and Ayebare Anil Pelice)Document5 pagesAbbreviated UAV Cloud Integration Proposal - (Katende Marvin and Ayebare Anil Pelice)Marvin KatendeNo ratings yet
- Placement Optimisation Method For Multi-UAVDocument11 pagesPlacement Optimisation Method For Multi-UAVBora kocaNo ratings yet
- Wireless Connectivity in Airplanes Challenges and The Case For UWBDocument13 pagesWireless Connectivity in Airplanes Challenges and The Case For UWBJorgeNo ratings yet
- Optimal Scheduling For Unmanned Aerial Vehicle Networks With Flow-Level DynamicsDocument12 pagesOptimal Scheduling For Unmanned Aerial Vehicle Networks With Flow-Level DynamicsDang Tuan LongNo ratings yet
- Performance Evaluation of Unmanned Aerial Vehicle Ad Hoc NetworksDocument4 pagesPerformance Evaluation of Unmanned Aerial Vehicle Ad Hoc NetworksJehanzeb KayaniNo ratings yet
- UavDocument31 pagesUavANSHUMANNo ratings yet
- 5G-Enabled UAVs With Command and Control SoftwareDocument16 pages5G-Enabled UAVs With Command and Control SoftwareEsmeralda ChavezNo ratings yet
- Environmentally-Aware and Energy-Efficient Multi-Drone Coordination and Networking For Disaster ResponseDocument17 pagesEnvironmentally-Aware and Energy-Efficient Multi-Drone Coordination and Networking For Disaster ResponseArshiya ShaikhNo ratings yet
- Advanced NetworkkingDocument15 pagesAdvanced NetworkkingRoha CbcNo ratings yet
- Collaborative Task Offloading and Resource Allocation With Hybrid Energy Supply For UAV-assisted Multi-CloudsDocument13 pagesCollaborative Task Offloading and Resource Allocation With Hybrid Energy Supply For UAV-assisted Multi-CloudsNguyen Khac ChienNo ratings yet
- Reinforcement-Learning For Management of A 5G Network Slice Extension With UavsDocument6 pagesReinforcement-Learning For Management of A 5G Network Slice Extension With UavsffwdfwdwfNo ratings yet
- IEEEAccess OuamriDocument11 pagesIEEEAccess OuamriMinou LuchianoNo ratings yet
- Multi Agent Reinforcement Learning Based Resource Allocation ForDocument15 pagesMulti Agent Reinforcement Learning Based Resource Allocation Forlukasmuench640No ratings yet
- Energy-Efficient UAV-to-User Scheduling To Maximize Throughput in Wireless NetworksDocument11 pagesEnergy-Efficient UAV-to-User Scheduling To Maximize Throughput in Wireless NetworksTrần Hoàng ThôngNo ratings yet
- VSAT2 - 33441 IJAERok15503 15512new2Document11 pagesVSAT2 - 33441 IJAERok15503 15512new2David SiegfriedNo ratings yet
- Peng 2021Document19 pagesPeng 2021Thanh KimNo ratings yet
- 2016 Survey On UAV Networks For Civil Applications A Communications ViewpointDocument38 pages2016 Survey On UAV Networks For Civil Applications A Communications Viewpointtoan đinhNo ratings yet
- 2019 Distributed and Multilayer UAV Networks For Next-Generation Wireless Communication and Power Transfer - A Feasibility StudyDocument13 pages2019 Distributed and Multilayer UAV Networks For Next-Generation Wireless Communication and Power Transfer - A Feasibility Studytoan đinhNo ratings yet
- A Service-Based Architecture For Enabling UAV Enhanced Network ServicesDocument9 pagesA Service-Based Architecture For Enabling UAV Enhanced Network Serviceshector alvaro garzon buitragoNo ratings yet
- Sensors 22 09180 v4Document13 pagesSensors 22 09180 v4liuNo ratings yet
- A Hybrid Communication Scheme For Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET)Document22 pagesA Hybrid Communication Scheme For Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET)Habib MohammedNo ratings yet
- Novel Survey On Power and Latency Aware Cloudlet Selection Strategy in Multi-Cloudlet AtmosphereDocument9 pagesNovel Survey On Power and Latency Aware Cloudlet Selection Strategy in Multi-Cloudlet AtmosphereIJRASETPublicationsNo ratings yet
- Joint Trajectory and Communication Design For Multi-UAV Enabled Wireless NetworksDocument16 pagesJoint Trajectory and Communication Design For Multi-UAV Enabled Wireless Networksaz BNo ratings yet
- Sensors: Drone Swarms As Networked Control Systems by Integration of Networking and ComputingDocument23 pagesSensors: Drone Swarms As Networked Control Systems by Integration of Networking and ComputingHoàng MạnhNo ratings yet
- Scaling Star-Coupler-Based Optical Networks For Avionics ApplicationsDocument12 pagesScaling Star-Coupler-Based Optical Networks For Avionics ApplicationsqwentionNo ratings yet
- Energy-Efficient Resource Allocation For UAV-Assisted Vehicular Networks With Spectrum SharingDocument12 pagesEnergy-Efficient Resource Allocation For UAV-Assisted Vehicular Networks With Spectrum Sharingsc00248No ratings yet
- UAVs As Mobile Infrastructure: Addressing Battery LifetimeDocument6 pagesUAVs As Mobile Infrastructure: Addressing Battery LifetimeGeorge KaragiannidisNo ratings yet
- Jiot 2021 3049608Document15 pagesJiot 2021 3049608Rodolpho ViégasNo ratings yet
- Trajectory Synthesis For A UAV Swarm Based On Resilient Data Collection ObjectivesDocument14 pagesTrajectory Synthesis For A UAV Swarm Based On Resilient Data Collection ObjectivesYoussef ameurNo ratings yet
- PXC 3895968 TheevolutionofaircraftdatanetworksDocument7 pagesPXC 3895968 Theevolutionofaircraftdatanetworksserdar.karamanNo ratings yet
- Electronics 11 01036 v2Document14 pagesElectronics 11 01036 v2kasun prabhathNo ratings yet
- 01 Accessing From The SkyDocument49 pages01 Accessing From The Skyremonadly2704No ratings yet
- Sensors: Performance Evaluation of Direct-Link Backhaul For UAV-Aided Emergency NetworksDocument16 pagesSensors: Performance Evaluation of Direct-Link Backhaul For UAV-Aided Emergency NetworksRam Kumar SharmaNo ratings yet
- Abstract - During The Last Few Years, Unmanned Aerial Vehicle (Uavs) For TheDocument6 pagesAbstract - During The Last Few Years, Unmanned Aerial Vehicle (Uavs) For TheAneelaMalikNo ratings yet
- DRL Minimum Throughput Maximization For Multi-UAV Enabled WPCNDocument9 pagesDRL Minimum Throughput Maximization For Multi-UAV Enabled WPCNNasir Khan BhittaniNo ratings yet
- Liu 2019Document13 pagesLiu 2019az BNo ratings yet
- INCREASING RANGE FOR UAVs BEYOND LINE OF SIGHT USING THE GSM BANDDocument7 pagesINCREASING RANGE FOR UAVs BEYOND LINE OF SIGHT USING THE GSM BANDMarvin KatendeNo ratings yet
- Developing An Adaptive Channel Modelling Using A Genetic Algorithm Technique To Enhance Aerial Vehicle-to-Everything Wireless CommunicationsDocument21 pagesDeveloping An Adaptive Channel Modelling Using A Genetic Algorithm Technique To Enhance Aerial Vehicle-to-Everything Wireless Communicationsraman yarramilliNo ratings yet
- Survey On Unmanned Aerial Vehicle Networks For Civil Applications: A Communications ViewpointDocument38 pagesSurvey On Unmanned Aerial Vehicle Networks For Civil Applications: A Communications ViewpointRandeep RNo ratings yet
- 03 A Tutorial On UAVs For Wireless NetworksDocument27 pages03 A Tutorial On UAVs For Wireless Networksremonadly2704No ratings yet
- Vehicular Communications: Meng-Chuan Mah, Heng-Siong Lim, Alan Wee-Chiat TanDocument13 pagesVehicular Communications: Meng-Chuan Mah, Heng-Siong Lim, Alan Wee-Chiat TanSebastian LopezNo ratings yet
- A Tutorial On UAVs For Wireless NetworksDocument24 pagesA Tutorial On UAVs For Wireless Networksgeorgia gameNo ratings yet
- WCECS2009 pp393-398Document9 pagesWCECS2009 pp393-398Md Saidur RahmanNo ratings yet
- Remotesensing 14 04501Document13 pagesRemotesensing 14 04501Hooper ChheangNo ratings yet
- Toward Autonomous Multi-UAV Wireless Network A Survey of Reinforcement Learning-Based ApproachesDocument30 pagesToward Autonomous Multi-UAV Wireless Network A Survey of Reinforcement Learning-Based ApproachesVy TungNo ratings yet
- Government Engineering College K .R Pet: "A 3D Smooth Random Walk Mobility Model For Fanets"Document13 pagesGovernment Engineering College K .R Pet: "A 3D Smooth Random Walk Mobility Model For Fanets"Preethu GowdaNo ratings yet
- 2018 Trajectory Optimization and Power Allocation For Multi-Hop UAV Relaying CommunicationsDocument11 pages2018 Trajectory Optimization and Power Allocation For Multi-Hop UAV Relaying Communicationstoan đinhNo ratings yet
- UAV Positioning For Throughput Maximization: Research Open AccessDocument15 pagesUAV Positioning For Throughput Maximization: Research Open AccessAbhishek GuptaNo ratings yet
- 2017 Performance Optimization For UAV-Enabled Wireless Communications Under Flight Time ConstraintsDocument6 pages2017 Performance Optimization For UAV-Enabled Wireless Communications Under Flight Time Constraintstoan đinhNo ratings yet
- Space/Aerial-Assisted Computing of Oading For IoT Applications: A Learning-Based ApproachDocument13 pagesSpace/Aerial-Assisted Computing of Oading For IoT Applications: A Learning-Based ApproachNivi PsNo ratings yet
- OPNET SimulatorDocument6 pagesOPNET SimulatorمحمدعظیمچوھدریNo ratings yet
- EPM 11.1.2.4 Download SummaryDocument3 pagesEPM 11.1.2.4 Download SummaryBalaji VarathriNo ratings yet
- DELL B1160 Printer Guide EnglishDocument165 pagesDELL B1160 Printer Guide Englishjgregors8683No ratings yet
- Netlinx Integrated Controller: Ni-3000 Specifications (Cont.)Document2 pagesNetlinx Integrated Controller: Ni-3000 Specifications (Cont.)Chacoroot NullNo ratings yet
- FX2N10GM Manual BookDocument282 pagesFX2N10GM Manual BookJamilNo ratings yet
- The C5x Devices Offer These AdvantagesDocument38 pagesThe C5x Devices Offer These AdvantagesmailtoakhilsNo ratings yet
- M FilesUsersGuideDocument347 pagesM FilesUsersGuideReal TestulescuNo ratings yet
- Javascript InterviewDocument5 pagesJavascript InterviewWarren RiveraNo ratings yet
- Performance Evaluation of Task Scheduling Using HybridMeta-heuristicin HeterogeneousCloudEnvironmentDocument10 pagesPerformance Evaluation of Task Scheduling Using HybridMeta-heuristicin HeterogeneousCloudEnvironmentArunvinodh ChellathuraiNo ratings yet
- Kubernetes Essentials: Cheat SheetDocument6 pagesKubernetes Essentials: Cheat SheetjNo ratings yet
- Ihab Ali Resume eDocument2 pagesIhab Ali Resume eapi-253435615No ratings yet
- Dynamic ScreenDocument5 pagesDynamic ScreenNitin SadashivNo ratings yet
- LAB #5 CPU Scheduling Algorithms-1: Objective TheoryDocument2 pagesLAB #5 CPU Scheduling Algorithms-1: Objective Theorykanwar zainNo ratings yet
- Web Applications Development TechnologiesDocument20 pagesWeb Applications Development Technologiesalemye abebawNo ratings yet
- 2023 - NeoSmart Interactive Whiteboard Katalog - PT. Neosys IndonesiaDocument13 pages2023 - NeoSmart Interactive Whiteboard Katalog - PT. Neosys IndonesiaNeosys IndonesiaNo ratings yet
- Hdfs Default XML ParametersDocument14 pagesHdfs Default XML ParametersVinod BihalNo ratings yet
- Assembler Directives 8086 UNIT-1Document40 pagesAssembler Directives 8086 UNIT-1Bala Krishna60% (5)
- Name: Sunitha Thatiparthi: Organization: Tata Consultancy Services LimitedDocument6 pagesName: Sunitha Thatiparthi: Organization: Tata Consultancy Services Limitedchandra chennupalliNo ratings yet
- Jurnal SIK Pengembangan SIKNAS Di Lampung 2018Document16 pagesJurnal SIK Pengembangan SIKNAS Di Lampung 2018ELLIYAWATINo ratings yet
- Rubber Dome Membrane Metal Contact Foam Element: KeyboardsDocument15 pagesRubber Dome Membrane Metal Contact Foam Element: KeyboardsshahirmonNo ratings yet
- Turbo Pascal Version 4.0 Owners Manual 1987 PDFDocument715 pagesTurbo Pascal Version 4.0 Owners Manual 1987 PDFRian MagsNo ratings yet
- BCA Syllabus FullDocument20 pagesBCA Syllabus FullJitendriya SahuNo ratings yet
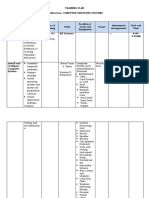
- Training PlanDocument3 pagesTraining Planraziel yuragNo ratings yet
- Siemens STLDocument272 pagesSiemens STLhaist10% (1)
- IBM EC12 sg248049Document490 pagesIBM EC12 sg248049jimkirk38870No ratings yet
- LTE Throughput DetailsDocument2,406 pagesLTE Throughput DetailsfehriNo ratings yet
- Chapter 2 - Arrays and StringDocument16 pagesChapter 2 - Arrays and StringChala GetaNo ratings yet
- Android CarService - Android Carservice-CSDN Blog-Part1Document8 pagesAndroid CarService - Android Carservice-CSDN Blog-Part1Rached MairchiNo ratings yet
- Pipenet Vision Spray/Sprinkler Module User and Reference ManualDocument253 pagesPipenet Vision Spray/Sprinkler Module User and Reference Manualx3350No ratings yet
- Modbus Master Step7Document16 pagesModbus Master Step7LeandroFeitosaNo ratings yet
- En Tia L: SM3281AB Test Program and ISP Release NoteDocument3 pagesEn Tia L: SM3281AB Test Program and ISP Release NotekhalibandiNo ratings yet