You might also like
- Lampiran 1 Koding AlatDocument34 pagesLampiran 1 Koding AlatMuhammad RoziNo ratings yet
- Lathe Leadscrew Arduino CodeDocument6 pagesLathe Leadscrew Arduino Codeclaudi94No ratings yet
- Fingerprint Sensor Door Lock ArduinoUNO MakerProDocument2 pagesFingerprint Sensor Door Lock ArduinoUNO MakerProHoh Yi KangNo ratings yet
- Cronometro No PulsanteDocument4 pagesCronometro No PulsanteJesaùl Mesias Huarhua ChancollaNo ratings yet
- Kran Air OtomatisDocument2 pagesKran Air OtomatisIdil AnggaraNo ratings yet
- Program Terapi Infrared Dengan Sensor JarakDocument2 pagesProgram Terapi Infrared Dengan Sensor JarakNur Fadil RusminNo ratings yet
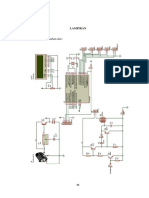
- Rangkaian Keseluruhan Alat:: LampiranDocument7 pagesRangkaian Keseluruhan Alat:: LampiranAdink M AlwiNo ratings yet
- Smart Dustbin Using Ultrasonic SensorDocument2 pagesSmart Dustbin Using Ultrasonic SensorAbdallaNo ratings yet
- CodDocument5 pagesCodJoel MooreNo ratings yet
- IncludeDocument2 pagesIncludeDra GoenNo ratings yet
- Caja FuerteDocument7 pagesCaja Fuertejuan david bermudez ballesterosNo ratings yet
- Tasks CaDocument5 pagesTasks CaSoftec TechnologyNo ratings yet
- 123Document2 pages123juan c. condori ch.No ratings yet
- Lab 9 MpiDocument4 pagesLab 9 MpiSohira QaziNo ratings yet
- Code ArduinoDocument13 pagesCode ArduinoChaimae FlissiNo ratings yet
- MATHEWDocument7 pagesMATHEWkiwandaemmanuel21No ratings yet
- Modul 2Document4 pagesModul 2AjiNo ratings yet
- Bahan Asisten PraktikumDocument2 pagesBahan Asisten PraktikumAnwar USNo ratings yet
- DC Motor Speed Control and Measurement Using Arduino and LCDDocument1 pageDC Motor Speed Control and Measurement Using Arduino and LCDPhostine OmondiNo ratings yet
- Car Speed Detector - InoDocument2 pagesCar Speed Detector - InoDINESH 18EEO3No ratings yet
- Finger Voting Final StuDocument27 pagesFinger Voting Final StuR. RagulNo ratings yet
- CodebomDocument3 pagesCodebomNguyỄn VăN NaMNo ratings yet
- Drone BlinkDocument4 pagesDrone BlinkptrNo ratings yet
- UltrasonicDocument2 pagesUltrasonicTio AndrianNo ratings yet
- Listing Program UnoDocument5 pagesListing Program UnoCahtheshow YoutubeNo ratings yet
- Include SENSORDocument2 pagesInclude SENSORBruno SacciottiNo ratings yet
- SomethingDocument3 pagesSomethingElla AnaidaNo ratings yet
- 7 Segment DisplayDocument30 pages7 Segment DisplayEyedel MehNo ratings yet
- Martin Adi Nugraha - 118170053 - UAS MekatronikaDocument11 pagesMartin Adi Nugraha - 118170053 - UAS MekatronikaAyu FerozaNo ratings yet
- CodeDocument2 pagesCodeSUMITH K SNo ratings yet
- Microcontrolleurs: Marin IulianaDocument19 pagesMicrocontrolleurs: Marin IulianaCoop ZkuberveitNo ratings yet
- Iot External FinalDocument24 pagesIot External FinalAbdul MuqtadirNo ratings yet
- Simulacion Programacion CeladaDocument23 pagesSimulacion Programacion CeladaEdwin Alberto Poveda RomeroNo ratings yet
- سسDocument3 pagesسسamine zdNo ratings yet
- Report 6 Corrected PagesDocument5 pagesReport 6 Corrected PagesMaaz KhanNo ratings yet
- Annexe: Programme Du MicrocontrôleurDocument3 pagesAnnexe: Programme Du MicrocontrôleurSoufianeBattalNo ratings yet
- Assignment 5Document27 pagesAssignment 5Nikita SinhaNo ratings yet
- Temperature Sensor Program CodeDocument6 pagesTemperature Sensor Program CodeJay Ann SaleNo ratings yet
- LCD ATmega164pDocument2 pagesLCD ATmega164pDaniloPilacuánNo ratings yet
- Clock Without Using RTC With Temperature and Humidity IndicatorDocument5 pagesClock Without Using RTC With Temperature and Humidity IndicatorIqra ArainNo ratings yet
- Ardduino ProjectDocument15 pagesArdduino ProjectGalih Dwi100% (2)
- AGV Project Codes CompilationDocument15 pagesAGV Project Codes CompilationJhasper ManagyoNo ratings yet
- ARDUINODocument5 pagesARDUINOKevin Wladimir ColumbaNo ratings yet
- Lampiran A Foto Mesin Pelipat Kertas OtomatisDocument10 pagesLampiran A Foto Mesin Pelipat Kertas OtomatisTri PujiyantoNo ratings yet
- Carrizo Seoane VergaraDocument2 pagesCarrizo Seoane VergaraLuz SeoaneNo ratings yet
- #Include XC.HDocument4 pages#Include XC.HAnass OkhitaNo ratings yet
- ARDUINODocument4 pagesARDUINOAura Citama PrisaNo ratings yet
- TimeDocument4 pagesTimeMohsin Iqbal Department of Electrical EngineeringNo ratings yet
- Code For ArduinoDocument2 pagesCode For Arduinoshanbel ayayuNo ratings yet
- CODEDocument4 pagesCODEBharathNo ratings yet
- UntitledDocument11 pagesUntitledDark CyperNo ratings yet
- Codigo para MancipeDocument2 pagesCodigo para Mancipegloosier3594No ratings yet
- Ca TaskDocument2 pagesCa TaskHumayun Khalid100% (1)
- Pic16f628a GSM SmsDocument6 pagesPic16f628a GSM SmsSake gtrNo ratings yet
- Temperature Controlled FanDocument1 pageTemperature Controlled Fansagar95padelaNo ratings yet
- Ngoclan 2Document2 pagesNgoclan 2Thế VĩNo ratings yet
- Prepaid Energy MeterDocument11 pagesPrepaid Energy MeterAditya ChauhanNo ratings yet
- Define BLYNKDocument5 pagesDefine BLYNKyanuartw7No ratings yet
- Skema & SketchDocument2 pagesSkema & SketchJAVI GUENo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)