You might also like
- Microprocessor Ee402 2016Document1 pageMicroprocessor Ee402 2016Aadarsh PandeyNo ratings yet
- Microprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureFrom EverandMicroprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureRating: 1 out of 5 stars1/5 (1)
- R5311901-Microprocessors and InterfacingDocument4 pagesR5311901-Microprocessors and InterfacingsivabharathamurthyNo ratings yet
- Multicore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCFrom EverandMulticore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCNo ratings yet
- 15A04407 Microprocessors & InterfacingDocument1 page15A04407 Microprocessors & InterfacingjravieceNo ratings yet
- Token Ring Technology ReportFrom EverandToken Ring Technology ReportNo ratings yet
- Btech Ee 5 Sem Microprocessor and Its Applications Nee504 2019Document2 pagesBtech Ee 5 Sem Microprocessor and Its Applications Nee504 2019Dheeraj SaraswatNo ratings yet
- Practical Embedded Controllers: Design and Troubleshooting with the Motorola 68HC11From EverandPractical Embedded Controllers: Design and Troubleshooting with the Motorola 68HC11No ratings yet
- WWW - Manaresults.Co - In: (Common To ECE, BME)Document2 pagesWWW - Manaresults.Co - In: (Common To ECE, BME)Mayank OnkarNo ratings yet
- C R5965 Pages: 2: Answer All Questions, Each Carries 3 MarksDocument2 pagesC R5965 Pages: 2: Answer All Questions, Each Carries 3 MarksVishal KeshariNo ratings yet
- Microprocessor exam questionsDocument5 pagesMicroprocessor exam questionsNeelima SinghNo ratings yet
- Introduction To MicroprocessorDocument9 pagesIntroduction To MicroprocessorAman NurNo ratings yet
- Time: 3 Hours Max. Marks: 100 Note: Be Precise in Your Answer. in Case of Numerical Problem Assume Data Wherever Not ProvidedDocument1 pageTime: 3 Hours Max. Marks: 100 Note: Be Precise in Your Answer. in Case of Numerical Problem Assume Data Wherever Not ProvidedATUL KUMAR YADAVNo ratings yet
- WWW - Manaresults.Co - In: (Common To ECE, ETM)Document2 pagesWWW - Manaresults.Co - In: (Common To ECE, ETM)Mayank OnkarNo ratings yet
- Previous QP MPIDocument9 pagesPrevious QP MPIISHU KUMARNo ratings yet
- Mca 205Document2 pagesMca 205kola0123No ratings yet
- Microprocessor and Microcontroller Anna University Question PapersDocument3 pagesMicroprocessor and Microcontroller Anna University Question PapersthennishaNo ratings yet
- MpiDocument2 pagesMpiRutvik JaimalaniNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityRohanNo ratings yet
- Answer All Questions. Figures at The Right Hand Margin Indicate Marks. All Parts of A Question Should Be Answered at One PlaceDocument2 pagesAnswer All Questions. Figures at The Right Hand Margin Indicate Marks. All Parts of A Question Should Be Answered at One Placear gNo ratings yet
- 121541-31541Document2 pages121541-31541mukulranag4No ratings yet
- MCS 012Document118 pagesMCS 012SongYak YamNo ratings yet
- Stucor QP Ee8551Document8 pagesStucor QP Ee8551NagendranNo ratings yet
- Stucor Qp-Ec8691Document21 pagesStucor Qp-Ec8691KrisHnA 2kNo ratings yet
- rr420402 Radar EngineeringDocument8 pagesrr420402 Radar EngineeringSRINIVASA RAO GANTANo ratings yet
- rr311903 Microprocessors and InterfacingDocument8 pagesrr311903 Microprocessors and InterfacingSRINIVASA RAO GANTANo ratings yet
- CS Final Exam Timing Diagram Interrupts Problems Pipelining FlagsDocument1 pageCS Final Exam Timing Diagram Interrupts Problems Pipelining Flagsabdullah noorNo ratings yet
- C E1153 Pages: 2: Answer All Questions, Each Carries 3 MarksDocument2 pagesC E1153 Pages: 2: Answer All Questions, Each Carries 3 MarksVishal KeshariNo ratings yet
- Microprocessor FundamentalsDocument2 pagesMicroprocessor FundamentalsAju AjeshNo ratings yet
- Time: 3 Hours Max. Marks: 100 Note: Be Precise in Your Answer. in Case of Numerical Problem Assume Data Wherever Not ProvidedDocument1 pageTime: 3 Hours Max. Marks: 100 Note: Be Precise in Your Answer. in Case of Numerical Problem Assume Data Wherever Not ProvidedATUL KUMAR YADAVNo ratings yet
- 5441 Microprocessors & InterfacingDocument1 page5441 Microprocessors & InterfacingMahesh Babu MahiNo ratings yet
- Answer All Questions, Each Carries 3 Marks: Reg No.: - NameDocument2 pagesAnswer All Questions, Each Carries 3 Marks: Reg No.: - NamelijaNo ratings yet
- Microprocessors and Interfacing Exam QuestionsDocument1 pageMicroprocessors and Interfacing Exam QuestionsMahesh Babu MahiNo ratings yet
- JNTU Old Question Papers 2007Document8 pagesJNTU Old Question Papers 2007Srinivasa Rao GNo ratings yet
- GTU BE Semester V Microprocessor Exam QuestionsDocument2 pagesGTU BE Semester V Microprocessor Exam Questionskalpesh_chandakNo ratings yet
- MCU and Microprocessor Exam with Questions on 8086, 8051, and TimersDocument2 pagesMCU and Microprocessor Exam with Questions on 8086, 8051, and TimersVishal KeshariNo ratings yet
- Microprocessors & Interfacing Exam QuestionsDocument3 pagesMicroprocessors & Interfacing Exam QuestionsSahil ShaikhNo ratings yet
- CS305 Microprocessors and Microcontrollers, December 2019Document2 pagesCS305 Microprocessors and Microcontrollers, December 2019Anas AnsarNo ratings yet
- Set No: 1: Code No: V3128/R07Document4 pagesSet No: 1: Code No: V3128/R07nileshNo ratings yet
- Apj Abdul Kalam Technological University: Answer All Questions, Each Carries3 MarksDocument2 pagesApj Abdul Kalam Technological University: Answer All Questions, Each Carries3 MarksVishal KeshariNo ratings yet
- GTU Microprocessor and Interfacing Exam QuestionsDocument2 pagesGTU Microprocessor and Interfacing Exam QuestionsAkshit VarmoraNo ratings yet
- ETC Raisoni Endsem PaperDocument14 pagesETC Raisoni Endsem PaperYogesh Jounjalkar100% (1)
- Question Paper Code:: (10×2 20 Marks)Document3 pagesQuestion Paper Code:: (10×2 20 Marks)Kumarasabapathy NatarajanNo ratings yet
- 2018-Dec ECD-311 58Document2 pages2018-Dec ECD-311 58Tusshar PaulNo ratings yet
- Gujarat Technological UniversityDocument11 pagesGujarat Technological Universityrathavachirag921No ratings yet
- 8086 Microprocessor Question BankDocument5 pages8086 Microprocessor Question Bankuma_saiNo ratings yet
- 9A04602 Microprocessors and MicrocontrollersDocument4 pages9A04602 Microprocessors and Microcontrollerssivabharathamurthy100% (1)
- QP Nov - 2011 3 - 1 Ecm MpiDocument4 pagesQP Nov - 2011 3 - 1 Ecm MpiMohit JoshiNo ratings yet
- CST307 Microprocessors and Microcontrollers, December 2021Document2 pagesCST307 Microprocessors and Microcontrollers, December 2021Anas Ansar0% (1)
- Time: 3 Hours Total Marks: 70: Printed Pages: 02 Sub Code: Paper Id: 131414 Roll NoDocument2 pagesTime: 3 Hours Total Marks: 70: Printed Pages: 02 Sub Code: Paper Id: 131414 Roll NoSHUBHAM KUMAR VERMANo ratings yet
- 4th Comp - SC 2022 (S)Document7 pages4th Comp - SC 2022 (S)Sisir Pradhan07No ratings yet
- Microprocessor Exam Questions from Gujarat Technological UniversityDocument2 pagesMicroprocessor Exam Questions from Gujarat Technological UniversityJustinNo ratings yet
- MPMC Nov 18Document2 pagesMPMC Nov 18SAURABH BHISENo ratings yet
- Ee8551 MPMC Ca-1 PDFDocument1 pageEe8551 MPMC Ca-1 PDFbaluNo ratings yet
- Internal - Assessment Paper of UITDocument2 pagesInternal - Assessment Paper of UITChandan KumarNo ratings yet
- Microprocessor and Interfacing - Question Paper May 2016 - Electronics & Telecomm (Semester 4) - Gujarat Technological University (GTU)Document4 pagesMicroprocessor and Interfacing - Question Paper May 2016 - Electronics & Telecomm (Semester 4) - Gujarat Technological University (GTU)YESHUDAS MUTTUNo ratings yet
- 9A04602 Microprocessors & MicrocontrollersDocument4 pages9A04602 Microprocessors & MicrocontrollerssivabharathamurthyNo ratings yet
- 2a - MICROPROCESSOR SYSTEMS AND INTERFACINGDocument5 pages2a - MICROPROCESSOR SYSTEMS AND INTERFACINGkoded traderNo ratings yet
- Manual Diagrama Detector de MetalesDocument18 pagesManual Diagrama Detector de MetalesEdmundo Cisneros0% (1)
- Physics of Power Dissipation in CMOS FET DevicesDocument70 pagesPhysics of Power Dissipation in CMOS FET DevicesPunith Gowda M BNo ratings yet
- K To 12 Basic Education Jhs SSP - Tle (Creative Technologies)Document22 pagesK To 12 Basic Education Jhs SSP - Tle (Creative Technologies)Honey Pie91% (11)
- 2012-11-01:【技術專題】Digital Voltage Control of Boost CRM PFC Converters PDFDocument23 pages2012-11-01:【技術專題】Digital Voltage Control of Boost CRM PFC Converters PDFhord72No ratings yet
- 190-00356-30 Displays Addendum PDFDocument50 pages190-00356-30 Displays Addendum PDFkirito asunameNo ratings yet
- ECEN689: Special Topics in High-Speed Links Circuits and Systems Spring 2012Document35 pagesECEN689: Special Topics in High-Speed Links Circuits and Systems Spring 2012api-127299018No ratings yet
- En733 PDFDocument2 pagesEn733 PDFachuthkumarNo ratings yet
- EXP 07 (Datappath Design)Document3 pagesEXP 07 (Datappath Design)Akash KapoorNo ratings yet
- HP Elitebook 6930p PDFDocument58 pagesHP Elitebook 6930p PDFMarcos Alessandro Santana SantosNo ratings yet
- Hannstar Product Specification: Model: Hsd101Pww1Document29 pagesHannstar Product Specification: Model: Hsd101Pww1Milan HouskaNo ratings yet
- ABS - Smartdust Network For Tactical Border Surveillance System To Detect, Classify and Track Enemy IntrusionDocument1 pageABS - Smartdust Network For Tactical Border Surveillance System To Detect, Classify and Track Enemy IntrusionRyan ZamoraNo ratings yet
- 16 PV1800 VPMDocument1 page16 PV1800 VPMMhamad melhemNo ratings yet
- Instruction Set 8085Document15 pagesInstruction Set 8085ali.sohail007412100% (12)
- An Introduction To PIC Assembly Language Programming - Microcontroller TutorialsDocument8 pagesAn Introduction To PIC Assembly Language Programming - Microcontroller Tutorialsessi12345No ratings yet
- 1 - Introduction To VLAN Theory and ConfigurationDocument26 pages1 - Introduction To VLAN Theory and ConfigurationZvele NavigatorNo ratings yet
- Irf 530 NPBFDocument9 pagesIrf 530 NPBFGabiBaciuNo ratings yet
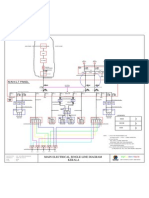
- Single Line DiagramDocument1 pageSingle Line DiagramSudipto Majumder100% (1)
- Ilicore: 4 Channel Driver Motor Driver D5954Document6 pagesIlicore: 4 Channel Driver Motor Driver D5954CIACIACIACIACIACIANo ratings yet
- Trouble Codes Copystar-Kyocera - Blackcat4866Document1,039 pagesTrouble Codes Copystar-Kyocera - Blackcat4866Paul SeralihNo ratings yet
- Fam CC206 - 4Document259 pagesFam CC206 - 4David YanuarNo ratings yet
- Motion Sensor Using PirDocument10 pagesMotion Sensor Using PirSHRUTI MOONNo ratings yet
- SlickEQ - Manual - Tokyo Dawn Knowledge BaseDocument18 pagesSlickEQ - Manual - Tokyo Dawn Knowledge BasePita AraújoNo ratings yet
- Lesson 6 Disassemble and Assemble of ComputerDocument25 pagesLesson 6 Disassemble and Assemble of ComputerMELCHOR CASTRONo ratings yet
- C4 - PIC18 Interrupt Programming1Document31 pagesC4 - PIC18 Interrupt Programming1Mifzal IzzaniNo ratings yet
- Ngspice 27 ManualDocument624 pagesNgspice 27 ManualMile BelojicaNo ratings yet
- DTMF Receiver For Telephones: BU8874 / BU8874FDocument10 pagesDTMF Receiver For Telephones: BU8874 / BU8874FYazan HaidarNo ratings yet
- Slip Rings: SRI085 V100 - XX - XX - Xxx1XxDocument3 pagesSlip Rings: SRI085 V100 - XX - XX - Xxx1XxMatheus Henrique MattiaNo ratings yet
- ZTE NODE-B ConnectivityDocument19 pagesZTE NODE-B ConnectivitySanjeet Doodi100% (7)
- 486 Sps 103Document61 pages486 Sps 103Samuel MarquezNo ratings yet
- Lecture - 5: DC-AC Converters: Ug - ProgramDocument54 pagesLecture - 5: DC-AC Converters: Ug - ProgramArife AbdulkerimNo ratings yet