You might also like
- Mechanical Vibration and Shock Analysis, Specification DevelopmentFrom EverandMechanical Vibration and Shock Analysis, Specification DevelopmentNo ratings yet
- ASTM Designation E 1926 - 98 Reapproved 2003Document18 pagesASTM Designation E 1926 - 98 Reapproved 2003rendyNo ratings yet
- E1926Document16 pagesE1926grats_singcoNo ratings yet
- IRI E1926.ssrt0435Document16 pagesIRI E1926.ssrt0435AaaaaNo ratings yet
- Computing International Roughness Index of Roads From Longitudinal Profile MeasurementsDocument16 pagesComputing International Roughness Index of Roads From Longitudinal Profile MeasurementsMarg OrpeecNo ratings yet
- Astm E1170Document10 pagesAstm E1170Mutyaba Johnson100% (1)
- Computing International Roughness Index of Roads From Longitudinal Profile MeasurementsDocument16 pagesComputing International Roughness Index of Roads From Longitudinal Profile Measurementsce22m101No ratings yet
- Using A Rolling Inclinometer To Measure Longitudinal and Transverse Profiles of A Traveled SurfaceDocument4 pagesUsing A Rolling Inclinometer To Measure Longitudinal and Transverse Profiles of A Traveled Surfaceayman m.waleedNo ratings yet
- Simulating Vehicular Response To Longitudinal Profiles of Traveled SurfacesDocument8 pagesSimulating Vehicular Response To Longitudinal Profiles of Traveled SurfacesAhmad Zubair RasulyNo ratings yet
- Simulating Vehicular Response To Longitudinal Profiles of Traveled SurfacesDocument8 pagesSimulating Vehicular Response To Longitudinal Profiles of Traveled Surfacesce22m101No ratings yet
- Computing Ride Number of Roads From Longitudinal Profile Measurements Made by An Inertial Profile Measuring DeviceDocument16 pagesComputing Ride Number of Roads From Longitudinal Profile Measurements Made by An Inertial Profile Measuring Devicece22m101No ratings yet
- D5D5M-13 Standard Test Method For Penetration of Bituminous MaterialsDocument14 pagesD5D5M-13 Standard Test Method For Penetration of Bituminous MaterialsAlabbas FadhelNo ratings yet
- Prioritization of Data Needs For Pavement ManagementDocument9 pagesPrioritization of Data Needs For Pavement ManagementDannyChaconNo ratings yet
- E2133 PDFDocument4 pagesE2133 PDFDannyChaconNo ratings yet
- Measuring Road Roughness by Static Level Method: Standard Test Method ForDocument6 pagesMeasuring Road Roughness by Static Level Method: Standard Test Method ForDannyChaconNo ratings yet
- E1448 PDFDocument8 pagesE1448 PDFAhmad Zubair RasulyNo ratings yet
- Measuring Road Roughness by Static Level Method: Standard Test Method ForDocument6 pagesMeasuring Road Roughness by Static Level Method: Standard Test Method ForJuan Carlos MejiaNo ratings yet
- Computing Ride Number of Roads From Longitudinal Profile Measurements Made by An Inertial Profile Measuring DeviceDocument16 pagesComputing Ride Number of Roads From Longitudinal Profile Measurements Made by An Inertial Profile Measuring DeviceDannyChaconNo ratings yet
- ASTM D2397-05 Cationic EmulsionsDocument11 pagesASTM D2397-05 Cationic EmulsionsRicardoNo ratings yet
- Friction Coefficient Measurements Between Tire and Pavement Using A Variable Slip TechniqueDocument8 pagesFriction Coefficient Measurements Between Tire and Pavement Using A Variable Slip TechniqueDannyChaconNo ratings yet
- Simulating Profilograph Response To Longitudinal Profiles of Traveled SurfacesDocument14 pagesSimulating Profilograph Response To Longitudinal Profiles of Traveled Surfacesce22m101No ratings yet
- Measuring Paved Surface Frictional Properties Using The Dynamic Friction TesterDocument8 pagesMeasuring Paved Surface Frictional Properties Using The Dynamic Friction TesterDannyChaconNo ratings yet
- Astm D3628 08Document11 pagesAstm D3628 08Lupita RamirezNo ratings yet
- Trox 100Document7 pagesTrox 100jrolarteNo ratings yet
- Astm e 670Document10 pagesAstm e 670frengki jmNo ratings yet
- Vehicle-Pavement Systems: Standard Terminology Relating ToDocument10 pagesVehicle-Pavement Systems: Standard Terminology Relating ToDannyChaconNo ratings yet
- Astm E1448/e1448m 09Document9 pagesAstm E1448/e1448m 09Lupita RamirezNo ratings yet
- Standard Practice For Quantifying Roughness of PavementsDocument4 pagesStandard Practice For Quantifying Roughness of PavementsManuel Enrique VásquezNo ratings yet
- ASTM E1845 Standard Practice For Calculating Pavement Macrotexture Mean Profile Depth PDFDocument4 pagesASTM E1845 Standard Practice For Calculating Pavement Macrotexture Mean Profile Depth PDFMehdi FarrokhiNo ratings yet
- ASTM E1845 - Standard Practice For Calculating Pavement Macrotexture Mean Profile Depth PDFDocument4 pagesASTM E1845 - Standard Practice For Calculating Pavement Macrotexture Mean Profile Depth PDFrendy100% (1)
- Vehicle-Pavement Systems: Standard Terminology Relating ToDocument11 pagesVehicle-Pavement Systems: Standard Terminology Relating ToDannyChaconNo ratings yet
- Vehicle-Pavement Systems: Standard Terminology Relating ToDocument11 pagesVehicle-Pavement Systems: Standard Terminology Relating ToMarg OrpeecNo ratings yet
- Classification of Automated Pavement Condition Survey EquipmentDocument4 pagesClassification of Automated Pavement Condition Survey EquipmentROHITNo ratings yet
- 20101Document9 pages20101DannyChaconNo ratings yet
- E1170Document8 pagesE1170DannyChaconNo ratings yet
- E1960 PDFDocument5 pagesE1960 PDFdannychacon27No ratings yet
- Standard Guide For Prioritization of Data Needs For Pavement ManagementDocument10 pagesStandard Guide For Prioritization of Data Needs For Pavement ManagementHenrique RibeiroNo ratings yet
- Calculating International Friction Index of A Pavement SurfaceDocument5 pagesCalculating International Friction Index of A Pavement SurfaceAhmad Zubair RasulyNo ratings yet
- Calculating Pavement Macrotexture Mean Profile Depth: Standard Practice ForDocument4 pagesCalculating Pavement Macrotexture Mean Profile Depth: Standard Practice ForEric GozzerNo ratings yet
- Measuring Pavement Roughness Using A Profilograph: Standard Test Method ForDocument4 pagesMeasuring Pavement Roughness Using A Profilograph: Standard Test Method ForEhab HarbNo ratings yet
- Standard Practice For Calculating International Friction Index of A Pavement SurfaceDocument5 pagesStandard Practice For Calculating International Friction Index of A Pavement SurfaceGuolong WangNo ratings yet
- Standard Guide For The Evaluation, and Calibration, Continuous Friction Measurement Equipment (CFME)Document6 pagesStandard Guide For The Evaluation, and Calibration, Continuous Friction Measurement Equipment (CFME)mickyfelixNo ratings yet
- E2415 PDFDocument4 pagesE2415 PDFdannychacon27No ratings yet
- E1448Document8 pagesE1448DannyChaconNo ratings yet
- ASTM E 445-88 Stopping Distance On Paved Surfaces Using A PassengDocument4 pagesASTM E 445-88 Stopping Distance On Paved Surfaces Using A PassenganjanaNo ratings yet
- Calculating International Friction Index of A Pavement SurfaceDocument5 pagesCalculating International Friction Index of A Pavement SurfaceOS LaboratoryNo ratings yet
- ASTM E1960-07 (2015) Cálculo Del IFIDocument5 pagesASTM E1960-07 (2015) Cálculo Del IFIJean Paul Tabera ColoradoNo ratings yet
- Astme950 PDFDocument6 pagesAstme950 PDFDany GuzmanNo ratings yet
- Skid Resistance of Paved Surfaces Using A Full-Scale Tire: Standard Test Method ForDocument6 pagesSkid Resistance of Paved Surfaces Using A Full-Scale Tire: Standard Test Method ForNamelezz ShadowwNo ratings yet
- Astm E1082Document5 pagesAstm E1082Mutyaba JohnsonNo ratings yet
- E2176 PDFDocument5 pagesE2176 PDFAtman FozdarNo ratings yet
- Astm D1195 - D1195M-21Document12 pagesAstm D1195 - D1195M-21anant11235100% (1)
- R-54-18 IriDocument6 pagesR-54-18 IriFilus 749No ratings yet
- Measuring Pavement Macrotexture Properties Using The Circular Track MeterDocument5 pagesMeasuring Pavement Macrotexture Properties Using The Circular Track MeterDannyChaconNo ratings yet
- ASTM E 2177-2001标准潮湿条件下路面标记反射亮度系数测量.Document5 pagesASTM E 2177-2001标准潮湿条件下路面标记反射亮度系数测量.杨过No ratings yet
- Determining Longitudinal Peak Braking Coefficient of Paved Surfaces Using A Standard Reference Test TireDocument5 pagesDetermining Longitudinal Peak Braking Coefficient of Paved Surfaces Using A Standard Reference Test TiremjaiswalNo ratings yet
- Calculating The International Runway Friction Index: Standard Practice ForDocument5 pagesCalculating The International Runway Friction Index: Standard Practice ForDannyChaconNo ratings yet
- E 303 - 93 (2013) PDFDocument5 pagesE 303 - 93 (2013) PDFlucky259No ratings yet
- Structural Health Monitoring of Large Civil Engineering StructuresFrom EverandStructural Health Monitoring of Large Civil Engineering StructuresNo ratings yet
- New Lakewood ScheduleDocument1 pageNew Lakewood ScheduleLupita PortilloNo ratings yet
- 2015MadSciencePL PDFDocument1 page2015MadSciencePL PDFOWIRobotsNo ratings yet
- Retro Marketing: By: - Ritender Pal Singh Roll No: - 08 Reg No: - 3020070133Document33 pagesRetro Marketing: By: - Ritender Pal Singh Roll No: - 08 Reg No: - 3020070133nawabrp100% (1)
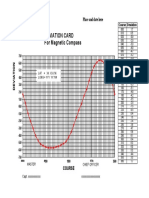
- Deviation CardDocument1 pageDeviation CardSatrya_74No ratings yet
- Fire Retardant Materials in IR CoachesDocument16 pagesFire Retardant Materials in IR CoachesM Shabbar KhanNo ratings yet
- EDVARD TIJAN, MLADEN JARDAS, SAŠA AKSENTIJEVIĆ, ANA PERIĆ HADŽIĆ - Integrating Maritime National Single Window With Port Community Syste, - Case Study CroatiaDocument10 pagesEDVARD TIJAN, MLADEN JARDAS, SAŠA AKSENTIJEVIĆ, ANA PERIĆ HADŽIĆ - Integrating Maritime National Single Window With Port Community Syste, - Case Study CroatiaaxyyNo ratings yet
- Mn/DOT Pavement Distress Identification ManualDocument51 pagesMn/DOT Pavement Distress Identification ManualEIRINI ZIGKIRIADOUNo ratings yet
- Level of Service Definitions PDFDocument2 pagesLevel of Service Definitions PDFMax Drake100% (1)
- Trace Elliot V Type Preamp Schematic 1Document8 pagesTrace Elliot V Type Preamp Schematic 1Serhii HolykNo ratings yet
- Assessing Competence in ECDIS NavigationDocument18 pagesAssessing Competence in ECDIS NavigationJonmorris Ridulfa100% (2)
- Mooring Line Care MaintenanceDocument2 pagesMooring Line Care MaintenanceMehmet Ali100% (1)
- FAA Advisory Circular Updates Heliport Design StandardsDocument196 pagesFAA Advisory Circular Updates Heliport Design Standardsiscrdmyslfagin100% (2)
- Plant Equipment Structures and GalleriesDocument802 pagesPlant Equipment Structures and GalleriesRAJESHNo ratings yet
- 5G Automotive Association (5GAA) - 061120 - IOO - Webinar - Presentation - Finalv4Document32 pages5G Automotive Association (5GAA) - 061120 - IOO - Webinar - Presentation - Finalv4lingNo ratings yet
- Booking 11 02Document4 pagesBooking 11 02Bryan FitzgeraldNo ratings yet
- Australian Bus & Coach-2023Document68 pagesAustralian Bus & Coach-2023Gary TanNo ratings yet
- Manchester TicketDocument2 pagesManchester TicketNikhil BhonsleNo ratings yet
- ICAO SMS M 01 - SMS Course (R013) 09 (E) (Compatibility Mode) PDFDocument5 pagesICAO SMS M 01 - SMS Course (R013) 09 (E) (Compatibility Mode) PDFFaisal KhanNo ratings yet
- Different Types of PropellersDocument19 pagesDifferent Types of PropellersŇel DanNo ratings yet
- 2020 SAW Ultraflex Steering & ControlsDocument91 pages2020 SAW Ultraflex Steering & ControlsmeaneyeNo ratings yet
- Creating and Inheriting Classes in PythonDocument2 pagesCreating and Inheriting Classes in Pythonbooklover2100% (1)
- IngramDocument1 pageIngram牟鲜旺100% (1)
- Navedtra14057 PDFDocument390 pagesNavedtra14057 PDFstephenhuNo ratings yet
- Ltce (Erzurum) R (11dec15) PDFDocument16 pagesLtce (Erzurum) R (11dec15) PDFnabatmanNo ratings yet
- KYMCO Super 8 50 150 Scooters Owner's Manual PDFDocument56 pagesKYMCO Super 8 50 150 Scooters Owner's Manual PDFHarald KarlssonNo ratings yet
- NSTL ReportDocument22 pagesNSTL ReportAbel EbinNo ratings yet
- Operator Carrier PDFDocument144 pagesOperator Carrier PDFGILMAR NIETONo ratings yet
- Important TRD ParametersDocument4 pagesImportant TRD ParametersLakshmiVishwanathan100% (1)
- Railway Retailing: Submitted ToDocument11 pagesRailway Retailing: Submitted Toankitp_88No ratings yet
- 0.1advanced Structures - Sustainable SteelDocument64 pages0.1advanced Structures - Sustainable Steelsilvinus clissonNo ratings yet