You might also like
- Schneider MODBUS TCP/IP: HMI SettingDocument2 pagesSchneider MODBUS TCP/IP: HMI Settingdaocongdabl100% (1)
- LCD 16X2 para PicsDocument21 pagesLCD 16X2 para Picsjuarez100% (1)
- Aws DumpsDocument168 pagesAws DumpsSurya Roganda Setiawan SitungkirNo ratings yet
- Hack Attacks Denied: A Complete Guide to Network LockdownFrom EverandHack Attacks Denied: A Complete Guide to Network LockdownRating: 3.5 out of 5 stars3.5/5 (3)
- Pic Lab ManualDocument29 pagesPic Lab ManualK T7No ratings yet
- Sample SQL DBA ResumeDocument4 pagesSample SQL DBA ResumePraveen Kumar Madupu0% (1)
- 350-401 PrepAwayDocument137 pages350-401 PrepAwaySebastian BurtonNo ratings yet
- ProMicro16MHzv1 PDFDocument1 pageProMicro16MHzv1 PDFrov1976100% (1)
- 8.circuito Con Un Led (Parte 4)Document11 pages8.circuito Con Un Led (Parte 4)carlo belliNo ratings yet
- Us-Key Spi v5.0Document25 pagesUs-Key Spi v5.0Marcos Fuller AlbanoNo ratings yet
- A1k (CPH1923)Document35 pagesA1k (CPH1923)Ayman EbrahemNo ratings yet
- 2022-4-18HW-FOC CommunicationDocument1 page2022-4-18HW-FOC CommunicationLeo TranNo ratings yet
- UntitledDocument34 pagesUntitlednitinNo ratings yet
- Ip5306 Reg V1.4Document9 pagesIp5306 Reg V1.4Jonathan Llewellyn AndradaNo ratings yet
- LCD ProgrammingDocument9 pagesLCD ProgrammingSumathi ReddyNo ratings yet
- Bitcoin Pres - CREOGNDocument24 pagesBitcoin Pres - CREOGNBridget McGoldrickNo ratings yet
- Easy 6502 by SkilldrickDocument12 pagesEasy 6502 by Skilldrickguerilla100% (1)
- Avr MicrocontrollerDocument29 pagesAvr MicrocontrollerAtish SubudhiNo ratings yet
- Esquema Elétrico 2 Moto G6 Plus XT1926-8Document46 pagesEsquema Elétrico 2 Moto G6 Plus XT1926-8Rivail ÁvilaNo ratings yet
- ECE2030 Introduction To Computer Engineering Lecture 17: Memory and Programmable LogicDocument37 pagesECE2030 Introduction To Computer Engineering Lecture 17: Memory and Programmable LogicAntonioNo ratings yet
- CANOpen Memento-2.03 PDFDocument13 pagesCANOpen Memento-2.03 PDFAnonymous pe0yczedNo ratings yet
- MM 74 C 912 NDocument8 pagesMM 74 C 912 NsuriantoNo ratings yet
- CANOpen MementoDocument13 pagesCANOpen MementoasdNo ratings yet
- Esign OTE: I C Bus SnifferDocument6 pagesEsign OTE: I C Bus SnifferLes Bois FlottésNo ratings yet
- Livro TesteDocument47 pagesLivro TesteJoão Rocha LabregoNo ratings yet
- Pin No. Name Description VSS VCC Power Supply (+5V) VEE RS R/W EN D0 D1 D2Document25 pagesPin No. Name Description VSS VCC Power Supply (+5V) VEE RS R/W EN D0 D1 D2suryateja247100% (1)
- SOFARSOLAR ModBus-RTU Communication ProtocolDocument15 pagesSOFARSOLAR ModBus-RTU Communication ProtocolPIPPO PAPPONo ratings yet
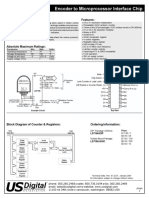
- Encoder To Microprocessor Interface Chip Chips: Features: DescriptionDocument3 pagesEncoder To Microprocessor Interface Chip Chips: Features: DescriptionasdNo ratings yet
- Chapter 3 Data Processing CircuitDocument26 pagesChapter 3 Data Processing CircuitKiddozesNo ratings yet
- Card10a Rev2 WebDocument1 pageCard10a Rev2 WebPravin NagpureNo ratings yet
- 8085 Serial CommunicationDocument25 pages8085 Serial CommunicationPrasad Sivvala100% (1)
- Instructions: Language of The MachineDocument47 pagesInstructions: Language of The MachineVishal MittalNo ratings yet
- LCD1602 BlackDocument20 pagesLCD1602 BlackRESERINGRAF PERU SACNo ratings yet
- ASUS ZenFone Max Pro M1 PDFDocument42 pagesASUS ZenFone Max Pro M1 PDFSANTOSH KHANALNo ratings yet
- CR028 Low Power Low Cost Reader ModuleDocument8 pagesCR028 Low Power Low Cost Reader ModulejamesksnNo ratings yet
- MODbus Communication Protocol - 150AH LIBDocument7 pagesMODbus Communication Protocol - 150AH LIBLone RangerNo ratings yet
- Toshiba 8x TranslateDocument7 pagesToshiba 8x TranslatealexandrNo ratings yet
- SOFARSOLAR ModBus-RTU Communication ProtocolDocument22 pagesSOFARSOLAR ModBus-RTU Communication ProtocolВячеслав ЛарионовNo ratings yet
- 18 Caches Cornell PDFDocument43 pages18 Caches Cornell PDFAditya DusiNo ratings yet
- Manipulare PorturiDocument33 pagesManipulare PorturiVasy AndrewNo ratings yet
- Unitronics DireccionamientoDocument5 pagesUnitronics DireccionamientoIsidro Igigi HernándezNo ratings yet
- Lecture15 PDFDocument21 pagesLecture15 PDFTimothy EngNo ratings yet
- AD7520, AD7521: 10-Bit, 12-Bit, Multiplying D/A Converters FeaturesDocument10 pagesAD7520, AD7521: 10-Bit, 12-Bit, Multiplying D/A Converters FeaturesmoocomNo ratings yet
- CPR04 Modbus Protocol 2v01Document21 pagesCPR04 Modbus Protocol 2v01ing.lunarNo ratings yet
- 12-Bit, Multiplying D/A Converter Features: Obso Lete Prod UCT Ible S Ubst Itute Prod UCT AD752 1Document8 pages12-Bit, Multiplying D/A Converter Features: Obso Lete Prod UCT Ible S Ubst Itute Prod UCT AD752 1sirosNo ratings yet
- SEIPRA Girouette AV Minibus - MBI5168Document15 pagesSEIPRA Girouette AV Minibus - MBI5168Smec KEOLISNo ratings yet
- COM2 Setting For PLCDocument8 pagesCOM2 Setting For PLCMarko GavrilovicNo ratings yet
- Software ModelDocument25 pagesSoftware Modelalomarianas52No ratings yet
- Lec 1 DIO BasicsDocument41 pagesLec 1 DIO BasicsRana HeshamNo ratings yet
- STATUS Register (RAM Memory Address 03h, 83h)Document4 pagesSTATUS Register (RAM Memory Address 03h, 83h)KanoNo ratings yet
- Beginning FPGA Programming - Partie66Document5 pagesBeginning FPGA Programming - Partie66ali alilouNo ratings yet
- Embedded System LabDocument62 pagesEmbedded System Labfatima100% (1)
- Lecture 8255 Ppi Upto ADC InterfacingDocument26 pagesLecture 8255 Ppi Upto ADC InterfacingAnadiKashyapNo ratings yet
- Cheat ManualDocument20 pagesCheat ManualplhoangvietNo ratings yet
- CAN TipsDocument45 pagesCAN TipsKenpachi ZarakiNo ratings yet
- Schneider MODBUS RTUDocument2 pagesSchneider MODBUS RTUabdolbazNo ratings yet
- Block DiagramDocument1 pageBlock DiagramLuis Alberto ArizaNo ratings yet
- Ppi: 82C55Document24 pagesPpi: 82C55abu taherNo ratings yet
- Xiaomi Redmi Note9Document32 pagesXiaomi Redmi Note9jhon jader murcia parraNo ratings yet
- To Disable Java Auto UpdateDocument10 pagesTo Disable Java Auto UpdateShashwatAgNo ratings yet
- On Using IEEE 1500 Standard For Functional TestingDocument8 pagesOn Using IEEE 1500 Standard For Functional TestingVeeresh TangadgiNo ratings yet
- Avaya Call Management System Release 13 Platform Upgrade and Data MigrationDocument82 pagesAvaya Call Management System Release 13 Platform Upgrade and Data MigrationAsnake TegenawNo ratings yet
- UnityPro Installation ManualDocument44 pagesUnityPro Installation ManualMuhtar IzuNo ratings yet
- LCD Panels: Service ManualDocument142 pagesLCD Panels: Service Manualhugo martinezNo ratings yet
- CAS - LP1000 Software ManualDocument28 pagesCAS - LP1000 Software ManualSteve Peter Robert GrandjeanNo ratings yet
- 15A05502 Computer NetworksDocument1 page15A05502 Computer NetworksJaya SankarNo ratings yet
- Bit Torrent in ErlangDocument47 pagesBit Torrent in ErlangBlack MobilusNo ratings yet
- July 12 - AIS - Study MaterialDocument14 pagesJuly 12 - AIS - Study MaterialLuciferNo ratings yet
- Spyder TutorialDocument15 pagesSpyder TutorialSushma RNo ratings yet
- OmniSwitch - Router User Manual R4-5Document1,100 pagesOmniSwitch - Router User Manual R4-5HeriNo ratings yet
- Main Components of The Digital Logic LayerDocument1 pageMain Components of The Digital Logic LayerNa shNo ratings yet
- Quick Start Guide For Driver Compilation and InstallationDocument8 pagesQuick Start Guide For Driver Compilation and InstallationCyber BellaaNo ratings yet
- May 23 Q13 MSDocument7 pagesMay 23 Q13 MSöznur altıntaşNo ratings yet
- OVS Dom0 Upgrade Livemigration SOP v1.56Document18 pagesOVS Dom0 Upgrade Livemigration SOP v1.56Akshay JoshiNo ratings yet
- 4.9.2 Lab - Integrate A REST API in A Python Application - ILMDocument17 pages4.9.2 Lab - Integrate A REST API in A Python Application - ILMSegita Armeilia SafrillaNo ratings yet
- PIC18F26J50Document554 pagesPIC18F26J50Diego Ignacio Pavez OlaveNo ratings yet
- It Era ReviewerDocument7 pagesIt Era ReviewerAngel LadimNo ratings yet
- H61S Series-Manual-En-V1.2 PDFDocument72 pagesH61S Series-Manual-En-V1.2 PDFCS IngenierosNo ratings yet
- Firebird GbakDocument22 pagesFirebird Gbakrrivera1981No ratings yet
- SwlogDocument14 pagesSwlogGregory HindsNo ratings yet
- CME Poster Script ExecutorDocument1 pageCME Poster Script ExecutorFrancisco Salvador MondlaneNo ratings yet
- PT Activity 7.3.2: Configuring Wireless LAN Access: Topology DiagramDocument4 pagesPT Activity 7.3.2: Configuring Wireless LAN Access: Topology DiagramVemasalNo ratings yet
- Installing MiniforgeDocument2 pagesInstalling MiniforgemacNo ratings yet
- C and Data Structures Q and ADocument267 pagesC and Data Structures Q and AAnandaKrishna SridharNo ratings yet
- University of Toronto Faculty of Applied Science and Engineering Aps106 Midterm Ii - March 27, 2014Document5 pagesUniversity of Toronto Faculty of Applied Science and Engineering Aps106 Midterm Ii - March 27, 2014Jungho Justin KimNo ratings yet
- Technical Interview Questions and AnswersDocument3 pagesTechnical Interview Questions and AnswersPjjhagNo ratings yet