You might also like
- PIC Projects and Applications using C: A Project-based ApproachFrom EverandPIC Projects and Applications using C: A Project-based ApproachRating: 4 out of 5 stars4/5 (2)
- BEE Lab Manual - 2019-20Document23 pagesBEE Lab Manual - 2019-20Venky DasamNo ratings yet
- Digital Logic Design CourseDocument1 pageDigital Logic Design CourseVinay PasiNo ratings yet
- Astable Multivibrator Using 555 Timer Simulated in ProteusDocument2 pagesAstable Multivibrator Using 555 Timer Simulated in ProteusSumithNo ratings yet
- Electronic Circuits Lab Manual Clippers and AmplifiersDocument29 pagesElectronic Circuits Lab Manual Clippers and AmplifiersAshwath NadahalliNo ratings yet
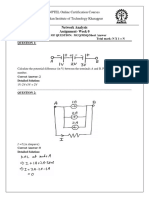
- NPTEL Online Certification Courses Indian Institute of Technology KharagpurDocument8 pagesNPTEL Online Certification Courses Indian Institute of Technology KharagpurABHISHEK GAUTAMNo ratings yet
- Lecture by Navakanta BhattDocument33 pagesLecture by Navakanta BhattVivek RoyNo ratings yet
- The International University of Scholars: Department of Computer Science & EngineeringDocument1 pageThe International University of Scholars: Department of Computer Science & EngineeringGK KaderyeNo ratings yet
- Master of Science (M.SC.) in Power Engineering (MSPE) - CurriculumDocument6 pagesMaster of Science (M.SC.) in Power Engineering (MSPE) - Curriculumashuapache3No ratings yet
- Biomedical Embedded SystemsDocument21 pagesBiomedical Embedded SystemsSathiya KumarNo ratings yet
- Optical Fiber Transmission Link ElementsDocument15 pagesOptical Fiber Transmission Link ElementsAchu0% (1)
- FET Exam Questions Cover BJT, MOSFET CircuitsDocument185 pagesFET Exam Questions Cover BJT, MOSFET CircuitsCham Raul100% (1)
- Virtual Labs Presentation IITDocument26 pagesVirtual Labs Presentation IITDr-Eng Imad ShaheenNo ratings yet
- LOGIC DESIGN LAB MANUAL EXPERIMENTSDocument80 pagesLOGIC DESIGN LAB MANUAL EXPERIMENTSabhinav kumarNo ratings yet
- Ec8361-Adc Lab ManualDocument118 pagesEc8361-Adc Lab ManualmuminthajNo ratings yet
- Microprocessors & Interfacing Lab ManualDocument30 pagesMicroprocessors & Interfacing Lab Manualjeravi84100% (1)
- Part III 8051 General PgmsDocument7 pagesPart III 8051 General PgmsHEMANo ratings yet
- Eletronics Lab Report - TTLDocument2 pagesEletronics Lab Report - TTLThan Lwin AungNo ratings yet
- IR Counter ReportDocument13 pagesIR Counter ReportShaunak DeNo ratings yet
- AC Lab Manual R22Document92 pagesAC Lab Manual R22vijayabhargavi.sapuri2011100% (1)
- ADCDocument7 pagesADCsharadaNo ratings yet
- 18EC44 I IA - New PDFDocument1 page18EC44 I IA - New PDFGovind M RoddannavarNo ratings yet
- Digital Circuits For GATE ExamDocument15 pagesDigital Circuits For GATE ExamSAMIT KARMAKAR100% (1)
- Lab No. 04 ARM Assembly Programming Using Arithmetic InstructionsDocument16 pagesLab No. 04 ARM Assembly Programming Using Arithmetic InstructionsAbdullah AbidNo ratings yet
- ECD Lab EEC 752Document17 pagesECD Lab EEC 752juhi99360% (5)
- Digital Communication Lab Manual For VI Semester B.Tech (Electronics Engineering)Document25 pagesDigital Communication Lab Manual For VI Semester B.Tech (Electronics Engineering)Nikolai RossanderNo ratings yet
- I-O PortsDocument20 pagesI-O PortsPradeep V DevNo ratings yet
- Electronics Circuits Lab ManualDocument109 pagesElectronics Circuits Lab ManualIndische Mädchen100% (2)
- Digital Electronics Lab Manual PDFDocument94 pagesDigital Electronics Lab Manual PDFRamkumar Sivakaminathan50% (2)
- Verilog CodeDocument60 pagesVerilog CodePriyanka JainNo ratings yet
- Adders and MultipliersDocument59 pagesAdders and Multipliersdbanbumani_501791840No ratings yet
- EC482 Biomedical Engineering (Ktustudents - In)Document3 pagesEC482 Biomedical Engineering (Ktustudents - In)Sachin SukumaranNo ratings yet
- B11-1029-MPMC (ECE3004) - MID-TERM QP PDFDocument1 pageB11-1029-MPMC (ECE3004) - MID-TERM QP PDFvikramNo ratings yet
- University of Pune S.E. I.T. Subject code: 214447 Processor Architecture and Interfacing Part 13: The 8255 PPIDocument24 pagesUniversity of Pune S.E. I.T. Subject code: 214447 Processor Architecture and Interfacing Part 13: The 8255 PPIPalash ParmarNo ratings yet
- Basic Electric Circuits - Unit 11 - Sinusoidal Steady State Analysis - 1Document4 pagesBasic Electric Circuits - Unit 11 - Sinusoidal Steady State Analysis - 1ABHISHEK GAUTAM100% (1)
- MCQ in Electronic Circuits Part 4Document17 pagesMCQ in Electronic Circuits Part 4Palani C100% (2)
- Digital Electronics Ec 1201Document34 pagesDigital Electronics Ec 1201ainugiri100% (1)
- Packed BCD To Unpacked BCDDocument5 pagesPacked BCD To Unpacked BCDRajveer JainNo ratings yet
- Tiva C Series LaunchPadDocument13 pagesTiva C Series LaunchPadVivek ShrigiriNo ratings yet
- Valliammai Engineering College: Department of Electronics and Communication EngineeringDocument9 pagesValliammai Engineering College: Department of Electronics and Communication EngineeringCecilia ChinnaNo ratings yet
- Digital ElectronicsDocument102 pagesDigital Electronicsdurga0% (1)
- Final C++ ManualDocument36 pagesFinal C++ ManualHarish G CNo ratings yet
- MP Viva Questions With AnswersDocument13 pagesMP Viva Questions With AnswersDeepti ChandrasekharanNo ratings yet
- Numbering Systems: Decimal Numbering System (Base 10)Document10 pagesNumbering Systems: Decimal Numbering System (Base 10)KasunShreeBandaraNo ratings yet
- A.V.C College of Engineering, Mannampandal M.E - Applied ElectronicsDocument3 pagesA.V.C College of Engineering, Mannampandal M.E - Applied ElectronicsAnonymous IkB7TZjNo ratings yet
- Microprocessor All Experiment IT PDFDocument22 pagesMicroprocessor All Experiment IT PDFSuraj KumarNo ratings yet
- VLSI Lab Part B SolutionsDocument40 pagesVLSI Lab Part B SolutionsNandiniManinarayanaNo ratings yet
- Slides - LabVIEW 3 Hour Hands-On With myDAQDocument73 pagesSlides - LabVIEW 3 Hour Hands-On With myDAQRockyFu100% (1)
- Assignment 2Document5 pagesAssignment 2Jemosha JeNo ratings yet
- Unit 3 - Week 0: Assignment 0Document4 pagesUnit 3 - Week 0: Assignment 0Akshay KumarNo ratings yet
- Me2255 Electronics and Microprocessor Anna University Question BankDocument6 pagesMe2255 Electronics and Microprocessor Anna University Question BankMayakannan RNo ratings yet
- MPMC PDFDocument210 pagesMPMC PDFAnonymous TxxI4MTTNo ratings yet
- Fpga ManualDocument7 pagesFpga ManualRahul SharmaNo ratings yet
- BCS302 Set 2Document2 pagesBCS302 Set 2megumifushiguru999No ratings yet
- Embedded System Lab - Blinking LED, Seven Segment Display and LCD Interfacing Projects Using PIC MicrocontrollerDocument62 pagesEmbedded System Lab - Blinking LED, Seven Segment Display and LCD Interfacing Projects Using PIC Microcontrollerfatima100% (1)
- Introduction To Mikroc PRO For PIC12Document27 pagesIntroduction To Mikroc PRO For PIC12Anonymous 0OpfKVQNo ratings yet
- Interfacing LED To PICDocument10 pagesInterfacing LED To PICshweta goyalNo ratings yet
- Interface 7 Segment Display using PIC16 MicrocontrollerDocument13 pagesInterface 7 Segment Display using PIC16 MicrocontrollerMuhammad YousafNo ratings yet
- Mca Exp 1,2,3Document22 pagesMca Exp 1,2,3s.abrar.ahmed.369No ratings yet
- Echem Sensors Datasheet v1.0.7Document2 pagesEchem Sensors Datasheet v1.0.7K T7No ratings yet
- Chapter 3, Robot Anatomy An ComponentsDocument42 pagesChapter 3, Robot Anatomy An ComponentsK T7No ratings yet
- Chapter 2 Industrial Robot ApplicationsDocument16 pagesChapter 2 Industrial Robot ApplicationsK T7No ratings yet
- Chapter 1, Introduction To RoboticsDocument15 pagesChapter 1, Introduction To RoboticsK T7No ratings yet
- New Text DocumentDocument1 pageNew Text DocumentK T7No ratings yet
- International Scholarships in Germany/2020/09/03Document1 pageInternational Scholarships in Germany/2020/09/03K T7No ratings yet
- Poultry Fool & FinalDocument42 pagesPoultry Fool & Finalaashikjayswal8No ratings yet
- Supervision Assigment 1Document18 pagesSupervision Assigment 1Wendimu Nigusie100% (3)
- B2 First Unit 11 Test: VocabularyDocument3 pagesB2 First Unit 11 Test: VocabularyNatalia KhaletskaNo ratings yet
- Organic Agriculture Gr11 Q2.Module5 LRDocument17 pagesOrganic Agriculture Gr11 Q2.Module5 LRJam Hamil AblaoNo ratings yet
- Norman ConquestDocument35 pagesNorman Conquestapi-463690129No ratings yet
- D20 Modern - Evil Dead PDFDocument39 pagesD20 Modern - Evil Dead PDFLester Cooper100% (1)
- Common Customer Gateway Product SheetDocument2 pagesCommon Customer Gateway Product SheetNYSE TechnologiesNo ratings yet
- The American Colonial and Contemporary ArchitectureDocument2 pagesThe American Colonial and Contemporary ArchitectureHaha HahaNo ratings yet
- State of Employee Engagement: Global Survey 2010Document16 pagesState of Employee Engagement: Global Survey 2010aptmbaNo ratings yet
- Unit 10 Working DrawingsDocument17 pagesUnit 10 Working Drawingsomoak2015No ratings yet
- 15 Aluminium Packaging PDFDocument4 pages15 Aluminium Packaging PDFAchmadda FebiyonoNo ratings yet
- STQ Issue 4 PDFDocument119 pagesSTQ Issue 4 PDFSiddhartha SinghNo ratings yet
- Municipal Trial Court in Cities: Motion For Release On RecognizanceDocument4 pagesMunicipal Trial Court in Cities: Motion For Release On RecognizanceMaria Leonora TheresaNo ratings yet
- The Small Trees High Productivity Initiative: Principles and Practice in High Density Orchard DesignDocument1 pageThe Small Trees High Productivity Initiative: Principles and Practice in High Density Orchard DesignPutchong SaraNo ratings yet
- OB History Endorsement FormatDocument6 pagesOB History Endorsement FormatVin CustodioNo ratings yet
- Cold WarDocument42 pagesCold WarTaiba HabibNo ratings yet
- Training Module - PGCIL - For World BankDocument43 pagesTraining Module - PGCIL - For World Bank3dicNo ratings yet
- 1964-1986 OMC Sterndrive ManualDocument572 pages1964-1986 OMC Sterndrive ManualBarry Pieters75% (4)
- Geoboards in The ClassroomDocument37 pagesGeoboards in The ClassroomDanielle VezinaNo ratings yet
- Instructions for GATE 2014 ApplicationDocument2 pagesInstructions for GATE 2014 ApplicationKumar SahebNo ratings yet
- Social, Humanitarian and Cultural Committee (SOCHUM)Document58 pagesSocial, Humanitarian and Cultural Committee (SOCHUM)Klara TomsicNo ratings yet
- Chapter 1 ReviewDocument6 pagesChapter 1 ReviewSolyKalNo ratings yet
- Fuellas Vs CadanoDocument4 pagesFuellas Vs CadanoMutyaAlmodienteCocjinNo ratings yet
- X-Ray Artifacts: by DR Mangal S MahajanDocument12 pagesX-Ray Artifacts: by DR Mangal S MahajanTsega HagosNo ratings yet
- англійська 11 final altered PDFDocument192 pagesанглійська 11 final altered PDFАнна НазаренкоNo ratings yet
- Dataoverwritesecurity Unit Type C Dataoverwritesecurity Unit Type DDocument12 pagesDataoverwritesecurity Unit Type C Dataoverwritesecurity Unit Type DnamNo ratings yet
- 7 Introduction To Life SkillsDocument2 pages7 Introduction To Life SkillsMailat SoranaNo ratings yet
- Literature Review Computer VisionDocument6 pagesLiterature Review Computer Visionfveec9sx100% (1)
- Chanakya National Law University, Patna: Project of Public International LawDocument22 pagesChanakya National Law University, Patna: Project of Public International LawAditya Singh100% (1)
- IAII FINAL EXAM Maual SET BDocument9 pagesIAII FINAL EXAM Maual SET BClara MacallingNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)From EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Rating: 5 out of 5 stars5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)From EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Rating: 5 out of 5 stars5/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- Model-based System and Architecture Engineering with the Arcadia MethodFrom EverandModel-based System and Architecture Engineering with the Arcadia MethodNo ratings yet
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- Dancing with Qubits: How quantum computing works and how it can change the worldFrom EverandDancing with Qubits: How quantum computing works and how it can change the worldRating: 5 out of 5 stars5/5 (1)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionFrom EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionRating: 5 out of 5 stars5/5 (2)
- From Cell Phones to VOIP: The Evolution of Communication Technology - Technology Books | Children's Reference & NonfictionFrom EverandFrom Cell Phones to VOIP: The Evolution of Communication Technology - Technology Books | Children's Reference & NonfictionNo ratings yet
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesFrom EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesNo ratings yet
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersFrom Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersNo ratings yet
- Kindle Fire Owner's Manual: The ultimate Kindle Fire guide to getting started, advanced user tips, and finding unlimited free books, videos and apps on Amazon and beyondFrom EverandKindle Fire Owner's Manual: The ultimate Kindle Fire guide to getting started, advanced user tips, and finding unlimited free books, videos and apps on Amazon and beyondRating: 4.5 out of 5 stars4.5/5 (4)