You might also like
- M/S Majumder Construction: Valuation Statement of PropertyDocument3 pagesM/S Majumder Construction: Valuation Statement of PropertyManoj MajumderNo ratings yet
- Fa20-Bee-150 MP Lab Report - 07Document5 pagesFa20-Bee-150 MP Lab Report - 07Saadat KhanNo ratings yet
- Fa20-Bee-150 MP Lab Report - 07Document5 pagesFa20-Bee-150 MP Lab Report - 07Saadat KhanNo ratings yet
- Analog Comparator: PE2 PE3Document16 pagesAnalog Comparator: PE2 PE3Arup NayakNo ratings yet
- Avr AdcDocument6 pagesAvr AdcMohamed SaadNo ratings yet
- Analog to Digital Conversion in AVR MicrocontrollersDocument12 pagesAnalog to Digital Conversion in AVR MicrocontrollersSathiya NathanNo ratings yet
- AVR ATMEGA16/32: Your Best Friend in Autonomous Robotics !!!Document25 pagesAVR ATMEGA16/32: Your Best Friend in Autonomous Robotics !!!sidraiz26No ratings yet
- Exp 8Document5 pagesExp 8Ashwini KothavaleNo ratings yet
- T19 AdcDocument11 pagesT19 AdcReyes Benitez LuisNo ratings yet
- ADC Measurement DetailDocument9 pagesADC Measurement DetailMuhammad SiddiqueNo ratings yet
- CHAPTER 5 Hardware InterfacingDocument51 pagesCHAPTER 5 Hardware InterfacingCheng Ching HaoNo ratings yet
- PIC16F877 ADC Module Lab NotesDocument3 pagesPIC16F877 ADC Module Lab NotesDomingo Dominguez GonzalezNo ratings yet
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 pagesHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Document13 pagesDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnNo ratings yet
- PIC18f452 ADC TutorialDocument13 pagesPIC18f452 ADC TutorialMalik Adil FarooqNo ratings yet
- Measuring Distance Using Infrared SensorsDocument5 pagesMeasuring Distance Using Infrared SensorsRajkeen ChamanshaikhNo ratings yet
- Embedded Systems Chapter 13: ADC, DAC and Sensor InterfacingDocument33 pagesEmbedded Systems Chapter 13: ADC, DAC and Sensor Interfacingsumbal_iqbal100% (1)
- Topic 13 - ATMega32 ADC in C (ISMAIL - SKE - UTM 2021)Document39 pagesTopic 13 - ATMega32 ADC in C (ISMAIL - SKE - UTM 2021)Aya AmirNo ratings yet
- ATmega16 ADC Conversion to Digital ValuesDocument7 pagesATmega16 ADC Conversion to Digital ValuesGaurav Shinde100% (1)
- Microcontrollers LabDocument19 pagesMicrocontrollers LabAMARNATHNAIDU77No ratings yet
- 21 Adc2Document9 pages21 Adc2vishnuksNo ratings yet
- An 477Document28 pagesAn 477radaresNo ratings yet
- Read MeDocument14 pagesRead MeJaga deshNo ratings yet
- The ADC of the AVR MicrocontrollerDocument25 pagesThe ADC of the AVR MicrocontrollerZauhari EffendiNo ratings yet
- PIC Power SupplyDocument0 pagesPIC Power Supplyaqdus100% (1)
- Chapter 7 - ADC ModuleDocument17 pagesChapter 7 - ADC ModuleBùi Tùng DươngNo ratings yet
- Digital Ammeter Using Atmega8aDocument13 pagesDigital Ammeter Using Atmega8aChandanNo ratings yet
- EEET2096 Tutorial Exercises - wk10Document2 pagesEEET2096 Tutorial Exercises - wk10Tyler PetersNo ratings yet
- How to Use an ADC PeripheralDocument37 pagesHow to Use an ADC PeripheralpatelgausNo ratings yet
- FIRDocument13 pagesFIRprateekkumardash2002No ratings yet
- CPR E 381x/382x Lab11aDocument10 pagesCPR E 381x/382x Lab11aHelenNo ratings yet
- AVRDocument20 pagesAVRAhsan KhanNo ratings yet
- roject mẫu AVR2Document58 pagesroject mẫu AVR2luuvuduc81No ratings yet
- PIC16F877A LM35 Temp MonitorDocument3 pagesPIC16F877A LM35 Temp MonitorKủ Chuối Vô TìnhNo ratings yet
- Welcome To Turbofuture!: Internet Computers Cell Phones Consumer ElectronicsDocument26 pagesWelcome To Turbofuture!: Internet Computers Cell Phones Consumer ElectronicsMoyukh MandalNo ratings yet
- Analog-to-Digital Conversion: Industrial Embedded SystemsDocument14 pagesAnalog-to-Digital Conversion: Industrial Embedded Systemschandramohan muruganNo ratings yet
- AICL01 Expt7 Report1Document11 pagesAICL01 Expt7 Report1OMKAR BHILARENo ratings yet
- ADC TutorialDocument58 pagesADC TutorialveerakumarsNo ratings yet
- Study ARM Evaluation System and Interfacing ADC and DACDocument125 pagesStudy ARM Evaluation System and Interfacing ADC and DACanandjothimanijothimNo ratings yet
- CED19I032Document20 pagesCED19I032Pranavram VNo ratings yet
- Using ADC (Analog To Digital Converter) of AVR MicrocontrollerDocument6 pagesUsing ADC (Analog To Digital Converter) of AVR MicrocontrollerfreeNo ratings yet
- Analog To Digital Convertor: PIC18f452Document13 pagesAnalog To Digital Convertor: PIC18f452ranaNo ratings yet
- 2 AdcDocument13 pages2 AdcM.i. RehmanNo ratings yet
- ADC Module: VoltageDocument5 pagesADC Module: VoltageAmmar AlkindyNo ratings yet
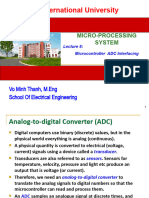
- Lecture 8_ADC InterfacingDocument33 pagesLecture 8_ADC InterfacinglhpaduongNo ratings yet
- 10-Analog To Digital ConverterDocument41 pages10-Analog To Digital ConverterSamuel ChristianNo ratings yet
- Lesson Adc PWMDocument36 pagesLesson Adc PWMDavidRubeomNo ratings yet
- Solution: Analog To Digital ConverterDocument11 pagesSolution: Analog To Digital ConverterAll OneNo ratings yet
- Laboratory 5 - ADC ManualDocument18 pagesLaboratory 5 - ADC ManualSravan KumarNo ratings yet
- Chapter 13: Analog To Digital Conversion, Data Acquisition and ControlDocument11 pagesChapter 13: Analog To Digital Conversion, Data Acquisition and ControlAnonymous GQjHHSX9yNo ratings yet
- Getting Precise With MSP430 Sigma-Delta ADC Peripherals: Vincent Chan MSP430 Business Development Manager TI AsiaDocument33 pagesGetting Precise With MSP430 Sigma-Delta ADC Peripherals: Vincent Chan MSP430 Business Development Manager TI AsiaStefanGLNo ratings yet
- A) Discuss About The Coding Instruction of ADC With Necessary Registers, Bits and Bit Pattern TablesDocument11 pagesA) Discuss About The Coding Instruction of ADC With Necessary Registers, Bits and Bit Pattern TablesAll OneNo ratings yet
- ADC Mikrokontroller Interface LCDDocument18 pagesADC Mikrokontroller Interface LCDYogha Satria LaksanaNo ratings yet
- ShortTest2-2016 SolutionDocument2 pagesShortTest2-2016 SolutionYash MaharajNo ratings yet
- Microprocessor Based Impedance Relay: TechnicalsymposiumDocument14 pagesMicroprocessor Based Impedance Relay: TechnicalsymposiumGaurav JaiswalNo ratings yet
- Programming PIC16F877A Microcontroller for LED Pattern Display and Sensor ReadingDocument57 pagesProgramming PIC16F877A Microcontroller for LED Pattern Display and Sensor ReadingDoodee Mohammed100% (4)
- Experiment No 3 AdcDocument8 pagesExperiment No 3 AdcDakshata WaghNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Fa20-Bee-150 MP Lab Report - 01Document3 pagesFa20-Bee-150 MP Lab Report - 01Saadat KhanNo ratings yet
- M.Waseem Khan (FA20-BEE-157)Document2 pagesM.Waseem Khan (FA20-BEE-157)Saadat KhanNo ratings yet
- Fa20-Bee-150 MP Lab Report - 01Document4 pagesFa20-Bee-150 MP Lab Report - 01Saadat KhanNo ratings yet
- Fa20-Bee-150 MP Lab Report - 02Document4 pagesFa20-Bee-150 MP Lab Report - 02Saadat KhanNo ratings yet
- EEE488 Lect3 HandoutsDocument12 pagesEEE488 Lect3 HandoutsSaadat KhanNo ratings yet
- PCS Lab Report No 10Document6 pagesPCS Lab Report No 10Saadat KhanNo ratings yet
- PCS LabDocument8 pagesPCS LabSaadat KhanNo ratings yet
- Pcs LabDocument7 pagesPcs LabSaadat KhanNo ratings yet
- Implement AM Receiver on USRP KitDocument5 pagesImplement AM Receiver on USRP KitSaadat KhanNo ratings yet
- PCS (Lab 03)Document8 pagesPCS (Lab 03)Saadat KhanNo ratings yet
- Ic M802 UDocument79 pagesIc M802 Uharis_fikriNo ratings yet
- Chapter 1 and 2Document67 pagesChapter 1 and 2Tle SupawidNo ratings yet
- Simply Supported Beam ReactionsDocument4 pagesSimply Supported Beam ReactionsRushi TutorNo ratings yet
- Lightning and Lightning ProtectionDocument5 pagesLightning and Lightning ProtectionrojofreNo ratings yet
- Guía de Instalación y Programación: Sistema de Seguridad de 32 ZonasDocument68 pagesGuía de Instalación y Programación: Sistema de Seguridad de 32 ZonasfernanfivNo ratings yet
- Definisi, Karakteristik dan Contoh Aplikasi SIGDocument28 pagesDefinisi, Karakteristik dan Contoh Aplikasi SIGtoyota taaNo ratings yet
- Of Course 1 - Dossier de Revisions ConfinementDocument5 pagesOf Course 1 - Dossier de Revisions ConfinementCamNo ratings yet
- Material Safety Data Sheet: Chemtherm 550Document6 pagesMaterial Safety Data Sheet: Chemtherm 550Javier vaca villalbaNo ratings yet
- Vitamin and Mineral Contents of Gongronema Latifolium LeavesDocument3 pagesVitamin and Mineral Contents of Gongronema Latifolium LeavesFrida Febriani IsnanisafitriNo ratings yet
- Kraby System 2018Document22 pagesKraby System 2018soga010178No ratings yet
- Cefiget-Range-Leaflet-PakistanDocument2 pagesCefiget-Range-Leaflet-PakistanZafran KhanNo ratings yet
- Theoretical Development of The Brooks-Corey CapillDocument7 pagesTheoretical Development of The Brooks-Corey CapillDiana Vanessa PedrazaNo ratings yet
- Akbh PSK (V), TRBH As Y: AdhimokṣADocument8 pagesAkbh PSK (V), TRBH As Y: AdhimokṣA张晓亮No ratings yet
- Chapter 3Document58 pagesChapter 3hasanNo ratings yet
- Worthy - Elevation WorshipDocument1 pageWorthy - Elevation WorshipSabine J.100% (1)
- Impex Kitchen Appliances PDFDocument4 pagesImpex Kitchen Appliances PDFqwqw11No ratings yet
- 9th Mole Concept and Problems Based On PDFDocument2 pages9th Mole Concept and Problems Based On PDFMintu KhanNo ratings yet
- Iodine Summaryupdate 2016Document26 pagesIodine Summaryupdate 2016FrankNo ratings yet
- Types of swords from around the worldDocument4 pagesTypes of swords from around the worldДмитрий МихальчукNo ratings yet
- A Drop of Blood: Casting Time Range Components Duration Casting Time Range Components DurationDocument6 pagesA Drop of Blood: Casting Time Range Components Duration Casting Time Range Components DurationCristobal RencoretNo ratings yet
- Fi & EiDocument3 pagesFi & EiPrasanna S Kulkarni100% (1)
- #10 VHB SGT-APT Design SummaryDocument2 pages#10 VHB SGT-APT Design SummarySenthil KumarNo ratings yet
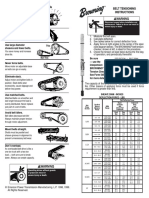
- Browning Belt Tension GaugeDocument2 pagesBrowning Belt Tension GaugeJasperken2xNo ratings yet
- Minitek Indore Profile 2Document9 pagesMinitek Indore Profile 2kunal agiwaleNo ratings yet
- 978 613 8 91055 8 PDFDocument309 pages978 613 8 91055 8 PDFEr Sayan ParamanikNo ratings yet
- Fetal and Placental Development - FETAL Sac, Umbilical Cord .Abnormalities of PlacentaDocument150 pagesFetal and Placental Development - FETAL Sac, Umbilical Cord .Abnormalities of PlacentaKripa SusanNo ratings yet
- Slovakia C1 TestDocument7 pagesSlovakia C1 TestĐăng LêNo ratings yet
- management of burns readingDocument28 pagesmanagement of burns readinghimanshugupta811997No ratings yet
- AAB 075323 EPDM Waterproofing Membrane (For RC Roof Build-Up Inc. Insulation)Document3 pagesAAB 075323 EPDM Waterproofing Membrane (For RC Roof Build-Up Inc. Insulation)tewodrosNo ratings yet