Professional Documents
Culture Documents
IJERTV3IS100721
Uploaded by
Hải vlogCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
IJERTV3IS100721
Uploaded by
Hải vlogCopyright:
Available Formats
See discussions, stats, and author profiles for this publication at: https://www.researchgate.
net/publication/325735814
Detection and Tracking System of Moving Objects Based on MATLAB
Article in International Journal of Engineering Research and · June 2018
CITATIONS READS
7 2,335
2 authors, including:
Habib Mohammed Hussien
Addis Ababa Science and Technology University
24 PUBLICATIONS 93 CITATIONS
SEE PROFILE
All content following this page was uploaded by Habib Mohammed Hussien on 13 June 2018.
The user has requested enhancement of the downloaded file.
International Journal of Engineering Research & Technology (IJERT)
ISSN: 2278-0181
Vol. 3 Issue 10, October- 2014
Detection and Tracking System of Moving
Objects Based on MATLAB
Habib Mohammed Hussien
Electrical and Electronics Technology Department
Federal TVET Institute
Addis Ababa, Ethiopia
Abstract: Moving Object detection and tracking are receiving frame of the goal of the various independence movements,
a growing attention with the emergence of surveillance systems. or the Users interested in the movement areas (such as the
Video surveillance has been in used in the monitor security human body, vehicles, etc.), and extract the object's
sensitive areas (such as banks, department stores, highways, position information, to receive the various objectives
crowded public places and borders, and etc.). In this thesis,
Trajectory. The making of video surveillance system best
video surveillance system with moving object detection and
tracking capabilities is presented. This thesis is committed to the requires fast, reliable and robust algorithm for moving
problems of defining and developing the basic building blocks of object detection and tracking system. Identifying moving
video surveillance system. The video surveillance system objects from a video sequence is a fundamental and critical
requires fast, reliable and robust algorithms for moving object task in many computer-vision applications. A common
detection and tracking. The system can process both color and approach is to perform background subtraction, which
gray images from a stationary camera. It can handle object identifies moving objects from the portion of a video frame
detection in indoor or outdoor environment and under changing that differs significantly from a background model. There
illumination conditions. This paper presents detection and are many challenges in developing a good object detection
RT
tracking system of moving objects based on matlab.It is
algorithm. First, it must be robust against changes in
described for segmenting moving objects from the scene .The
proposed system is capable of adapting to dynamic scene, illumination Second, it should avoid detecting non-
removing shadow, and distinguishing left/removed objects both stationary background objects such as swinging leaves,
IJE
in indoor and outdoor. The proposed technique combines rain, snow, and shadow cast by moving objects. Finally, its
simple frame difference (FD), simple adaptive background internal background model should react quickly to changes
subtraction (BS), and accurate Gaussian modeling to benefit in background such as starting and stopping of vehicles.
from the high detection accuracy of Mixture of Gaussian After identifying moving object in a given scene, the next
solution (MoG) in outdoor scenes while reducing the step in video analysis is tracking. Tracking can be defined
computations .Thus, making it faster and more suitable for as the creation of temporal correspondence among detected
real time surveillance applications, This study used IFD(Inter-
objects from frame to frame. This procedure provides
Frame Differencing algorithm) and bounding box method to
track the objects. temporal identification of the segmented regions and
generates cohesive information about the objects in the
Keywords: Video Surveillance, Moving Object Detection, monitored area such as trajectory, speed or direction. In
Background Subtraction, Moving Object Tracking, Frame everyday life, humans visually keep detecting and tracking
differencing, Mixture of Gaussian model a multitude of objects with certain objectives in mind.
1. INTRODUCTION Examples are orientation in the environment, recognizing
persons in the surroundings, locating, recognizing,
As surveillance systems are becoming more popular, monitoring and handling of objects. Although much has
robust detection and tracking techniques are needed to been learned from biological and human vision for image
determine moving objects. Moving object detection and processing and analysis, the markedly different tasks and
tracking in the military, intelligence monitoring, human capabilities of the function modules have to be kept in
machine interface, virtual reality, motion analysis and mind. It is not possible to simply transfer or copy the
many other fields have Wide application prospects in human biological vision to machine vision system.
science and engineering. It has important research value, However, the basic functionality of the human vision
which attracting more and more researchers at home and system can guide us in the task of how these principles can
abroad. The current detection and tracking system is bet transferred to technical vision system such as motion
mainly using two techniques: First, the use of radar analysis. The analysis of motion gives access to the
technology for tracking; while another is based on image dynamics of processes. Motion analysis is generally a very
processing technology to achieve target tracking. Our complex problem. The true motion of objects can only be
paper is based on image processing to achieve the inferred from their motion after the 3-D reconstruction of
objectives of detection and tracking system. Image the scene. The increasing use of video sensors, with Pan-
sequence of moving target tracking, is detected in each Tilt and Zoom capabilities or mounted on moving
IJERTV3IS100721 www.ijert.org 797
(This work is licensed under a Creative Commons Attribution 4.0 International License.)
International Journal of Engineering Research & Technology (IJERT)
ISSN: 2278-0181
Vol. 3 Issue 10, October- 2014
platforms in surveillance and autonomous driving vehicle. recognition purpose. Whereas motion tracking is an iterative
The outputs of these algorithms can be used both for process of determining the trajectory of a moving object
providing the human operator with high level data to help during a video sequence, by monitoring the object‟s spatial
him to make the decisions more accurately in a shorter and temporal changes, including its presence, position, size,
time and for offline indexing and searching stored video shape, etc. This is done by solving the temporal
data effectively. The advances in the development correspondence problem, i.e. the problem of matching the
of these algorithms would lead to breakthroughs in target region in successive frames of a sequence of images
applications that use visual surveillance. Papers inspired taken at closely-space time intervals. These two processes are
me to develop the proposed systems algorithm are [1-5,10 closely related because motion tracking usually starts with
,15,22,23,24,25,26,27,28] detecting moving objects, while detecting an object
This paper presents a detection and tracking repeatedly in subsequent image sequence is often necessary
Detection and Tracking systems of moving objects for to help and verify tracking. Given a live feed frames
monitoring outdoor and indoor scenes with gradual sequences from a fixed camera, detecting all the foreground
illumination changes and swinging tree branches. The objects and estimate the trajectory of the object of interest
technique combines frame differencing (FD), Background moving in the scene. There are many challenges in
subtraction (BS) and Mixture of Gaussian Model (MoG) developing a good object detection algorithm. First, it must
to get a robust detection results by focusing the attention be robust against changes in illumination. Second, it should
on the most probable foreground pixels. And we used IFD avoid detecting non-stationary background objects such as
(inter-frame differencing tracking algorithm) to track the swinging leaves, rain, snow, and shadow cast by moving
detected objects. objects. Finally, its internal background model should react
quickly to changes in background such as starting and
2. RELATED WORKS stopping of moving objects. In video surveillance in addition
There are several background modeling schemes ranging to detection problems there are also problems in tracking
from simple techniques keeping single background state objects. One of the problems of tracking is that dynamic
estimates and providing acceptable accuracy for simple objects move in patterns that are highly non-linear. Another
applications, all the way to complicated techniques with full important problem is simultaneously tracking multiple
density estimates; thus providing better accuracy at the moving objects, correspondence, partial overlapping and
expense of increased memory and complexity. Background occlusions. The proposed system must solve these problems
RT
subtraction is particularly a commonly used technique for correctly.
motion segmentation in static scenes [6].
FD is the simplest technique with the background being the 4. METHODLOGY
IJE
previous frame. This method has low memory requirements, Each application that benefit from video processing
O (1), high speed, and high adaptability; but suffers from the has different needs, thus requires different treatment.
aperture problem. IVSS [3] uses FD to generate “hypotheses” However, they have something in common: moving objects.
about the objects, then verifies them by extracting the Thus, detecting regions that correspond to moving objects
features using Gabor filter, and classifies objects using such as people and vehicles in video is the first basic step of
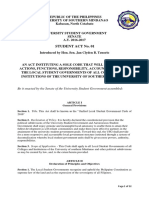
support vector machine. almost every vision system and video processing as shown in
Collins et al. developed a hybrid method that combines the fig. 1 below.
three-frame differencing with an adaptive background
subtraction model for their VSAM project [3]. The hybrid
algorithm successfully segments moving regions in video
without the defects of temporal differencing and background
subtraction.
The W4 [4] system uses a statistical background model where
each pixel is represented with its minimum (M) and
maximum (N) intensity values and maximum intensity
Connected
difference (D) between any consecutive frames observed 0bject detection Post processing Object tracking
component analysis
during initial training period where the scene contains no
moving objects.
Display
Stauffer and Grimson [5] presented a novel adaptive online
background mixture model that can robustly deal with
lighting changes, repetitive motions, clutter, introducing or Alert management
removing objects from the scene and slowly moving objects
3. PROBLEM STATEMENT Fig. 1 A Generic Framework for Video Processing Algorithm
Problems concerning about this system can be classified An overview of the entire moving object detection and
into two categories; motion detection and motion tracking. tracking system is shown in Fig.2 The technique combines
Motion detection involves verifying the presence of a moving Frame differencing, adaptive background subtraction and
object in image sequences based on the object‟s temporal MoG to reduce the computations of MoG and improve its
change and possibly locating it precisely for tracking or accuracy by focusing the attention on the most probable
IJERTV3IS100721 www.ijert.org 798
(This work is licensed under a Creative Commons Attribution 4.0 International License.)
International Journal of Engineering Research & Technology (IJERT)
ISSN: 2278-0181
Vol. 3 Issue 10, October- 2014
foreground pixels. This proposed system able to detect and processing modules such as object tracking, recognition, and
track moving object in a given scene. The system uses counting. Many approaches are proposed on this topic based
stationary camera to acquire video frames from outside on the background module and procedure used to maintain
world. The system starts by feeding video frames from a the model. In the past, the computational power of the
static camera that supposed to monitor a given site. The processor limited the complexity of Foreground detection
system can work both indoor as well as outdoor. The first implementation.
step of our approach is identifying foreground objects from
4.1.2. THRESHOLDING
stationary background. Here we use hybrid adaptive scheme
algorithm, to identify the foreground object. Next step is post Thresholding operation is an operation used to convert a gray
processing to remove noises that cannot handled by proposed scale image to binary image. A binary image consists of 2
system. After applying post processing, connected component colours, whether it‟s black („0‟) or white („1‟). A suitable
analysis will follow and group the connected regions in the threshold value must be selected in order to separate the
foreground map to extract individual object‟s features such as object from the background. The equation for the
bounding box, area, center of mass etc.The final step of this thresholding is given by Equation (1). Fig.3 illustrates an
system is tracking. The tracking algorithm is inter-frame example of thresholding operation of sub-image.
differencing (IFD).This algorithm uses object features to
track objects from frame to frame. 1 ('255' f ( x, y ) Th (1)
f ( x, y )
0 ('0' ) f ( x, y ) Th
Input video sequences
Where T = Threshold value
Intializati
on update
fi f i 1 Background
1 8 15 80 0 0 0 1
(previous frame) (current frame) model T=30
200 3 20 168 1 0 0 1
4 250 10 40 0 1 0 1
Background
Frame differencing
Subtraction 60 70 100 4 1 1 1 0
Segment into Static/Non-static Background and
Threshold update
Fig. 3 Illustration of Thresholding Operation
update
Regiom of motion In other words, the thresholded image g(x, y) is defined as
1 fr ( x, y ) thresh
RT
if
ga( x, y )
0 if fr ( x, y ) thresh (2)
Match/Update/Sort Distribuyions
Foreground Detection Using Hystheresis 4.1.3. ADAPTIVE BACKGROUND SUBTRACTION
IJE
thresholding
MODEL
Forground pixels Our implementation of background subtraction algorithm is
Post processing partially inspired by the study presented in [3] and works on
Connected component analysis
grayscale video imagery from a static camera. Our
background subtraction method initializes a reference
Object tracking background with the first few frames of video input. Then it
Display
subtracts the intensity value of each pixel in the current image
from the corresponding value in the reference background
Alert management image. Let Bg ( x, y )
Fig. 2 Block Diagram for Detection and Tracking System be the corresponding background intensity value for pixel
position
4.1. MOVING OBJECT DETECTION ( x, y ) estimatedovertimefromvideoimages I 0 ( x, y ) through
Distinguishingforegroundobjectsfromthe stationary I t 1 ( x, y ) . As the generic background subtraction scheme
background is both a significant and difficult research suggests, a pixel at position ( x, y ) in the current video image
problem. The first step of almost all visual surveillance belongs to foreground if it satisfies
systems is detecting foreground objects. This both creates a | I t ( x, y) Bg ( x, y) Th |
focus of attention for higher processinglevelssuchastracking (3)
and reduces computation time considerably since only pixels This algorithm (Equation (3)) provides the most complete
belonging to foreground objects need to be dealt with. Short features data. Moving objects in the scene are detected by the
and long term dynamic scene changes such as repetitive difference between the current frames and the current
motions (e. g. waiving tree leaves), light reflections, shadows, background model.
camera noise and sudden illumination variations make the The algorithm of adaptive Background subtraction detection
reliable and fast object detection difficult. So that the is described below.
proposed system solved those problems. · fi: A pixel in a current frame, where i is the frame index.
· : A pixel of the background model (fi and m are located
4.1.1. FOREGROUND DETECTION
at the same location).
Foreground detection plays a very important role in a video · di: Absolute difference between fi and m.
content analysis system. It is a foundation for various post- · bi: F mask - 0: background. 0xff: foreground
IJERTV3IS100721 www.ijert.org 799
(This work is licensed under a Creative Commons Attribution 4.0 International License.)
International Journal of Engineering Research & Technology (IJERT)
ISSN: 2278-0181
Vol. 3 Issue 10, October- 2014
· T: Threshold unable to detect a stopped target object start to move, can be
· a: Learning rate of the background. fully overcome by frame differencing. By combining the
1. di = |fi - | advantages of these algorithms we can get algorithm that is
2. If di > T , fi belongs to the foreground; otherwise, it robust to illumination change, high computational efficiency
belongs to the background. or accuracy and highly adaptive to dynamic changes.
Although these are usually detected, they leave behind Frame differencing algorithm
„holes‟ where the newly exposed background imagery differs · fi-1 : A pixel in a previous frame, where i is the frame
from the known background model. While the background index.
model eventually adapts to these holes. They generate false · fi : A pixel in a current frame
alarms for a short period of time. In this algorithm, a pixel in · Background initialization -----Bg =fr0
the current frame is considered as foreground or part of the · di: A pixel-wise absolute difference between fi and fi-1.
region of motion if the absolute difference between its current · di+1: A pixel-wise absolute difference between fi and fi+1.
values and its background values is larger than thresh. · bi: foreground mask - 0: background. 0xff: foreground.
| I ( x, y) Bg ( x, y) | thresh · T: Threshold
1. di = |fi - fi-1| and di+1 = |fi - Bg|
2. If di > T & di+1 > T, fi belongs to the foreground;
otherwise, it belongs to the background.
4.1.4. TEMPORAL DIFFERENCING
Input video sequence
Temporal differencing makes use of the pixel-wise difference Intializati
between two or three consecutive frames in video imagery to f i 1
on update
fi Background
extract moving regions. It is a highly adaptive approach to (previous frame) (current frame) model
dynamic scene changes; however, it fails in extracting all
Background
relevant pixels of a foreground object especially when the Frame differencing
Subtraction
object has uniform texture or moves slowly. When a
Segment into Static/Non-static Background and
foreground object stops moving, temporal differencing Threshold update
method fails in detecting a change between consecutive Regiom of motion
update
frames and loses the object. Special supportive algorithms are
RT
required to detect stopped objects. We implemented a two- Match/Update/Sort Distribuyions
frame temporal differencing method in our system. Foreground Detection Using
Hystheresis thresholding
Let I t ( x, y ) represents the gray-level intensity value at pixel
IJE
position (x) and at time instance n of video image sequence Forground pixels
I ( x, y ) which is in the range [0, 255]. The two-frame Post processing
temporal differencing scheme suggests that a pixel is moving
if it satisfies the following(Equation (6)).
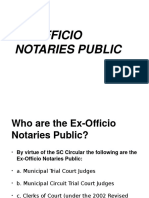
| I t ( x, y) I t 1 ( x, y) | Th Fig. 4 Proposed technique (Hybrid adaptive scheme algorithm) block
(5) diagram
The algorithm of temporal differencing based foreground
detection is described below. I. COMPUTING REGION OF MOTION
· fI : A pixel in a current frame, where I is the frame index.
· fI-1: A pixel in a previous frame (fI and fI-1 are located at The first step is to compute the region of motion. FD (Frame
the same location.) differencing) is applied to get the boundaries of the portion of
· dI: Absolute difference of fI and fI-1. the scene that is moving. A pixel It(x, y) is classified as
· bI: F mask - 0: background. 0xff: foreground foreground if the difference between It(x, y) and its
· T: Threshold value predecessors at time t-1 is larger than a threshold ITh as
1. dI = |fI - fI-1| shown in Equation(6).
2. If dI > T, fI belongs to the foreground; otherwise, it I t ( x, y) I t 1 ( x, y) I th (6)
belongs to the background comparisons for all the pixels in the frame, we update
4.1.5. PROPOSED SYSTEM (HYBRID ADAPTIVE only the parameters of the portion of the scene where an
ESCHEME ALGORITHM) object is suspected and sort the corresponding
We have developed a hybrid adaptive scheme algorithm for distributions. Since objects are usually very small
detection of moving object as you see from fig.4 by compared to the whole frame, this leads to huge
combining temporal differencing technique with background reductions in computations. In other words, the proposed
subtraction technique. As discussed above .frames technique will be beneficial in two folds: Even though
differencing algorithm cannot extract all entire shape or simple FD is less immune to noise than 3FD, any noise
interior object information. On the other hand background introduced will be corrected in the later detection stage. FD is
subtraction has a capability of extracting entire shape and all very adaptive to dynamic changes and requires keeping one
interior pixels information of the moving object. The previous frame only. However, FD cannot detect all interior
drawback of background, means generating false alarm, and object information and fails to detect any if the object stops
moving at a certain frame. Thus an additional background
IJERTV3IS100721 www.ijert.org 800
(This work is licensed under a Creative Commons Attribution 4.0 International License.)
International Journal of Engineering Research & Technology (IJERT)
ISSN: 2278-0181
Vol. 3 Issue 10, October- 2014
subtraction technique is required to form the region of match [15]. The idea is to have two thresholds, Tlow and
motion. A simple background is kept and selectively updated Thigh Thigh. If the difference between the current pixel
at each frame. A pixel in the current frame is considered
part of the region of motion if the absolute difference value and the distribution mean is less than T low, the
between its current value and its background value is larger pixel is strongly classified as background. If the
than ITh: difference between the current pixel value and the
distribution mean is larger than Thigh, the pixel is classified
| I t ( x, y) Bt ( x, y) | I Th (7)
as foreground. Otherwise, the pixel is a foreground candidate
Initially, the background is the first frame, assuming there are or a weak candidate .Above K = 5. For each new frame, the
no objects. ITh may be initialized as shown in Equation (8) pixels inside the motion area are checked and the
I th ( x, y) m( x, y) c * s( x, y) (8) corresponding parameters are updated. Given a pixel It in the
where m(x, y) and s(x, y) are the mean and standard motion area; we check the corresponding distributions for the
deviation of a local area, which is supposed to be small distribution that It best fits or is most likely to belong to.
enough to preserve local details but large enough to The best match is defined as the distribution whose mean is
suppress noise, and c defines how much of the total print not just the closest to It but also close enough to be
object boundary is taken as a part of the given object. The considered alike. Let dk,t be the distance(It, µk,t) for k=1:K,
whole image could also be taken as one area since the
math {( k ,t , k ,t )d k ,t and d k ,t min[ d1,t .....d k ,t ]}
threshold will be corrected for each pixel in the training phase (12)
anyway. At each new frame, B(x,y) and ITh(x,y) are then For grayscale images, λ is usually 2.5, which accounts
updated for nonmoving pixels: for almost 98.76% of the values from that distribution [14].
Bi ,t ( x, y) 1 Bt ( x, y) (1 1 ) I t ( x, y) (9) If there is a match, the corresponding parameters will be
updated as
I th ( x, y) 1 I th ( x, y) (1 1 )(5* | I t ( x, y) Bt ( x, y) |)
i 1 i
(10)
Where α1 is a time constant specifying the rate of adaptation. i ,t (1 ) i ,t 1 I t (13)
The final motion region contains interesting moving 2 i ,t (1 ) 2 ( I t i ,t ) 2 (14)
objects or uninteresting swinging of trees or even both.
Eventually, only interesting moving objects should be left. Where / i,t
So, the next step is to cluster/fill the objects in the motion The approximation in(10) is faster and more logical than
RT
area and then perform selective MoG to get the interesting the one α=0.9, v = 0.09, α=0.005, T=0.7 (non busy scene),
objects out of the whole motion area. T =2, T =3.1 init low high used in [9] for winner-takes all
II. SELECTIVE MATCH AND UPDATE scenarios [15]. Note that distance the proposed technique
outperforms the other techniques and is able computations
IJE
Each pixel is modeled as a mixture of K Gaussians [9]: may be modified to avoid square root operations. All to
f ( I t u ) i L i ,t (u : i ,t , i ,t )
k
(11) handle scenes with waving trees and light changes. The holes
th
in weights are then updated as:
Where η(u;µi,t,σi,t) is the i Gaussian distribution also i ,t (1 )i ,t 1 M i ,t (15)
called component, wi,t is the weight or probability of each
1 if matched (16)
Gaussian, and K is the number of distributions, which ranges M i ,t
0 if nonmatched
from 3 to 5. Usually, 3 Gaussian distributions are kept per
pixel; at least one distribution is needed to represent Otherwise, the component with the least weight is replaced
foreground objects and two distributions to represent by a Foreground Pixels correctly identified by algorithm new
multimodal backgrounds. Increasing the number of component with mean I, large variance and small weight
distributions improves the performance to a certain extent at and Precision(16) maintain the means and variances of the
the expense of increasing memory requirements and other components, but lower Total Fore ground detected
computations. Even though K may be go up to 7, not much Pixels by algorithm their weights according to (16).
improvement is obtained The threshold T is a value III. FOREGROUND DETECTION USING
between 0 and 1. If T is very small, then most of the HYSTERESIS THRESHOLDING
distributions will be classified as foreground and
consequently one distribution at most will correspond to All the components are then sorted by their values of wi/σi,
the background, which means that we will not be able to with the higher ranked components being classified as
handle multimodal backgrounds. If T is very large, then most background. This is because high values correspond to bigger
of the distributions will be classified as background; thus weight values and smaller variances, which means more
objects will quickly become part of the background. A trade prominent components. The first B
off would be to choose T around 0.6. This value may vary distributions that verify (17) are chosen as background
depending on the type of the scene, whether it is a busy scene distributions:
B arg min b ( k T ) (17)
n
with lots of moving objects or just few objects. The next step k 0
is to compare the current pixel to these background The threshold T is a value between 0 and 1.if T is very
distributions and classify it as background if it matches any of small, the most of the distributions will be classified as
the background distributions, otherwise as a foreground pixel. foreground and consequently one distribution at most will
Instead of using simple matching, Power and Schooners correspond to the background, this means that we will not be
suggested using hysteresis thresholding when looking for a
IJERTV3IS100721 www.ijert.org 801
(This work is licensed under a Creative Commons Attribution 4.0 International License.)
International Journal of Engineering Research & Technology (IJERT)
ISSN: 2278-0181
Vol. 3 Issue 10, October- 2014
able to handle multimodal backgrounds. If T is very large, further operation so as to improve the efficiency of
then most of the distribution will be classified as background; foreground detection mechanism. The next step is noise
thus objects will quickly become part of the background. A removal.
trade off would be to choose T around 0.6.this value may
4.2.1. NOISE REMOVAL
vary depends on the type of the scene, whether it is a busy
scene with lots of moving objects or just few objects. The algorithms that are applied to detect moving object
The next step is to compare the current pixel to this produce the expected foreground. However, it is highly
background distribution and classify it as background if it expected to observe some noises that cannot be handled by
matches any of the background distributions, otherwise as a background model. This noise affects the output of many
foreground pixel. Instead of using simple matching, powers calculation stages during the processing of a frame and
and schooners suggested using hysteresis thresholding when overall mask becomes inaccurate due to noise. In order to get
looking for a match [15].The idea is to have two thresholds improved results, noise removal is a crucial step.
and Thigh . If the difference between the current pixel value Morphological operation, dilation and erosion, are applied to
the foreground pixel map in order to remove noise caused by
and the distribution mean is larger than T high ,the pixel is camera noise, reflectance noise, background colored object
classified as foreground. Otherwise, the pixel is a foreground noise, and any noises that cannot handled by background
candidate or weak candidate as shown in (14).Additional model [18],[19].
connected component check procedure is needed to 4.2.2. MORPHOLOGICAL OPERATIONS
classify the candidate pixels as foreground or
background. If a candidate pixel is found to be 8- Morphological operations, erosion and dilation[20], are
connected to a foreground pixel, it becomes a foreground applied to the foreground pixel map in order to remove noise
pixel. Afterwards, morphological operators are applied to that is caused by the first three of the items listed above. Our
form the final foreground mask. aim in applying these operations is removing noisy
di | fr fri 1 | or di 1 | fr Bg | Or for both. foreground pixels that do not correspond to actual foreground
(18) regions.
As in equation (18) explained In this proposed algorithm or
hybrid adaptive scheme algorithm we will have three kinds of 4.3. CONNECTED COMPONENT ANALYSIS
RT
foreground pixels
Foreground pixels belongs to both frame differencing and A set of pixels in an image which are all connected to
adaptive background subtraction. Foreground pixels belongs each other is called a connected component. Finding all
to either frame differencing or adaptive background connected components in an image and marking each of them
IJE
subtraction .Foreground pixels that belong to only either to with a distinctive label is called connected component
frame differencing or adaptive background subtraction. As labeling After detecting foreground regions and applying
we know the main problem with frame differencing is that post-processing operations to remove noise and shadow
pixels interior to an object with uniform intensity are not regions, the filtered foreground pixels are grouped into
included in the set of moving object pixels. Interior pixels can connected regions (blobs) and labeled by using a two-level
be filled by applying adaptive background subtraction to connected component labeling algorithm presented in
extract all of the moving pixels. Let Bgt(x, y) represent the [18].After finding individual blobs that correspond to objects,
current background intensity value at pixel(x,y) ,then pixels the bounding boxes of these regions are calculated.
that are significantly different from the background model
4.4. MOVING OBJECT TRACKING
Bgt(x,y)
bn( x, y) ( x, y) :| I t ( x, y) Bg ( x, y) | thresh (19)
Tracking is generating the trajectory of an object over
time by locating its position in every frame of the video. The
(X, y) Є moving pixels. Equation(19) will overcome the aim of object tracking is to establish a correspondence
drawback of frame differencing. Then for moving and non between objects or object parts in consecutive frames and to
moving object pixels the background and the threshold can be extract temporal information about objects such as trajectory,
update as follows in Equation (20) and (21). posture, speed and direction. The tracking method we have
(FG=foreground pixels, BG=Non-moving object pixels) developed is inspired by the study presented in [21]. Our
* Bg t ( x, y) (1 ) * I t ( x, y), ( x, y) BG approach shown in fig.5 makes use of the object features such
Bg t 1 ( x, y)
Bg t ( x, y), ( x, y) FG (20) as size, center of mass, bounding box etc. which are extracted
thresh for ( x, y ) FG in previous steps to establish a matching between objects in
thresh consecutive frames. Obtaining the correct track information is
* thresh (1 )( * ( fr _ diff ( x, y ))) for ( x. y ) BG 21)
crucial for subsequent actions, such as event modeling and
4.2. POST PROCESSING activity recognition. Once we get the filtered foreground
The outputs of foreground region detection algorithms we pixels, in the next step, connected regions are found by using
explained in previous three sections generally contain noise a connected component labeling algorithm and objects‟
and therefore are not appropriate for further processing bounding rectangles are calculated. The labeled regions may
without special post-processing. In the post-processing step contain near but disjoint regions due to defects in foreground
the following basic tasks must be done before doing any segmentation process. Hence, it is experimentally found to be
effective to merge those overlapping isolated regions. Also,
IJERTV3IS100721 www.ijert.org 802
(This work is licensed under a Creative Commons Attribution 4.0 International License.)
International Journal of Engineering Research & Technology (IJERT)
ISSN: 2278-0181
Vol. 3 Issue 10, October- 2014
some relatively small regions caused by environmental noise makes impossible many complicated algorithms. From these
are eliminated in the region-level post-processing step. considerations, we decide to implement a simple, direct, but
effective algorithm, which here we refer to as IFD algorithm.
It simply finds the difference between the current frame and a
INPUT FROM DETECTION ALGORITHM
reference frame and labels the non-stationary pixels. The
mean and standard deviation of the non-stationary pixels are
Post Processing calculated and they are used as an indication of the position
and size of the foreground object. This procedure is repeated
Connected Component analysis
for each frame, and the tracking output is displayed on the
monitor as a rectangular box.
Object Tracking Algorithm
4.6. EVENT MODELING
Plotting Method
This thesis presents a system for adaptive moving object
detection and tracking applications. The system has been
Edge Detection Bounding Box designed to monitor outdoor as well as indoor environments.
The final task of the architecture is to automatically provide
Display alarms when specific events of interest are detected
Fig. 5 Block Diagram for Object tracking system
4.7. GRAPHICAL USER INTERFACE DESIGN
We used Matlab software to develop the GUI shown in
The moving object detection and, tracking steps are Fig.6.The GUI was designed to facilitate interactive system
dependent on each other. Thus, the tracking system would operation.GUI can be used to setup the program, launch it,
deliver inappropriate results, if one of the previous steps does stop it and display results. During setup stage the operator is
not achieve good performance. An important condition in an promoted to choose motion detection and tracking algorithm.
object tracking algorithm is that the motion pixels of the Whenever the start/stop toggle button is pressed the system
moving objects in the images are segmented as accurately as will be launched and the selected program will be called to
possible. perform the calculations until the start/stop button is pressed
again which will terminate the calculation and return control
RT
4.5. MOVING A OBJECT TRACKING BASED ON REGION
This method identifies and tracks a blob token or a to GUI. Results can be viewed as detection and tracking
bounding box, which are calculated for connected consequently.
components of moving objects in 2D space. The method
IJE
relies on properties of these blobs such as size, color, shape,
velocity, or centroid. A benefit of this method is that it time
efficient, and it works well for small numbers of moving
objects. For example, [40] presents a method for blob
tracking. Kalman filters are used to estimate pedestrian
parameters. Region splitting and merging are allowed. Partial
overlapping and occlusion is corrected by defining a
pedestrian model. From the above Object tracking system
flow chart, we can see that we apply morphological filters
based on combinations of dilation and erosion to reduce the
influence of noise, followed by a connected component
analysis for labeling each moving object region. Very small
regions are discarded. At this stage we calculate the following
feature for each moving object region: bounding rectangle:
the smallest rectangle that contains the object region. We Fig. 6 GUI Layout Design
keep record of the coordinate of the upper left position and
the lower right position, what also provides size information 4.8. EXPERIMENTAL RESULTS
(width and height of each rectangle).The basic principle is,
after detecting foreground regions and applying post- This section demonstrates some of the tested image
processing operations to remove noise and shadow regions, sequences that are able to highlight the effectiveness of the
the filtered foreground pixels are grouped in to connected proposed detection system. These experimental results are
regions (blobs) and labeled by connected component labeling obtained using the proposed detection and tracking algorithm
algorithm. After finding individual blobs that correspond to that has been discussed above. Fig.7 shows the difference
objects, the bounding boxes of these regions are calculated. between different algorithms and fig.8 shows the better result
of the proposed detection system.
4.5.1. IFD (INTER- FRAME DIFFERENCING)
The external memory is also limited that we cannot store
multiple frames for processing, as we did in the matlab. This
IJERTV3IS100721 www.ijert.org 803
(This work is licensed under a Creative Commons Attribution 4.0 International License.)
International Journal of Engineering Research & Technology (IJERT)
ISSN: 2278-0181
Vol. 3 Issue 10, October- 2014
4.8.1. DIFFERENT ALGORITHMS DETECTION 4.10. PROPOSED TRACKING ALGORITHM RESULTS
RESULTS
Fig. 9 Results from proposed tracking algorithms
Fig. 7 Results from different algorithm,((a1), (a2), and (a3)) are background 4.11. CONCLUSIONS AND FUTURE WORKS
images, ((b1) ,(b2), and (b3)) are feed video inputs from camera, (c1) ,(c2), Generally, this project is to develop an algorithm for
and (c3) are detection results from frame differencing, ((d1), (d2) and (d3
))are detection results from background subtraction ,((e1), (e2) and(e3)) are
moving object detection and tracking system. This algorithm
detection results from proposed system( hybrid adaptive scheme is successfully implemented using Matlab integrated
development environment. As a result, the algorithm is able
4.9. PROPOSED DETECTION SYSTEM DETECTION to detect and track a moving object that is moving, as long as
RESULTS the targeted object emerged fully within the camera view
range. The input for this project is video sequences which
were captured via USB camera or built-in integrated webcam.
RT
The first step of the algorithm is to sample the video
sequence into static frames. This train of frames is originally
in red-green-blue (RGB). To ease computation, then RGB
IJE
frames are converted to a suitable format (binary). Each
frame is then being put into the filtering process, adaptive
scheme algorithm, thresholding, post processing and finally,
tracking process done.
The main objective of this project is to develop an
algorithm that is able to detect and track moving objects. In
this thesis we presented a set of methods and tools for
moving object detection and tracking system. We
Fig. 8 Proposed detection system detection results implemented three different object detection algorithms and
compared their detection quality and time-performance. Our
As shown in fig.7, detection results form single object and thesis (detection and tracking system of moving objects based
multiple objects video feed, (a1)-(a3) are background image on matlab) includes the following two main building blocks:
(b1)-(b3) are feed video sequences from static camera and Moving Object Detection and Object Tracking. Moving
(e1)-(e3) are results from proposed detection system, hybrid Object detection segments the moving targets from the
adaptive scheme algorithm. From the detection result we can background and it is the crucial first step in video
see that, the algorithm determine the legitimate region(s) as surveillance. In this thesis we implemented and tested
well as it extract all information of moving object(s).fig 9 temporal differencing object detection algorithms,
shows the proposed tracking algorithm results and we got the background subtraction, and Hybrid adaptive scheme
result we need. algorithms, and compared their detection quality and time
performance.
The proposed technique combines simple frame
difference(FD), simple adaptive background subtraction
(BS), and accurate Gaussian modeling to benefit from the
high detection accuracy of Mixture of Gaussian solution
(MoG) in outdoor scenes while reducing the computations
required, thus, making it faster and more suitable for
surveillance applications. Furthermore, it gives the most
promising results in terms of detection quality, speed and
computational complexity to be used in surveillance system
IJERTV3IS100721 www.ijert.org 804
(This work is licensed under a Creative Commons Attribution 4.0 International License.)
International Journal of Engineering Research & Technology (IJERT)
ISSN: 2278-0181
Vol. 3 Issue 10, October- 2014
with stationary cameras. The tracking is based on Inter-frame [18] C. R. Wren, A. Azarbayejani, T. J. Darrell, and A. P. Pentland.
Pfinder: Real-time tracking of the human body. IEEE
differencing and bounding box method. Every system has its
Pattern Recognition and Machine
own limitation and needs improvements.
The proposed system is not perfect in all direction. As [19] I. Haritaoglu, D. Harwood, and L. S. Davis: W4: Who? When?
some future works, shadow removal and sudden illumination Where? What? A real-time system for detecting and
tracking people. In Proc. 3rd Face and Gesture
changes process can be achieved with more robust detection
Recognition Conf., pages 222-227, 1998.
algorithms which improves object detection and tracking. [20] F. Heijden.Image Based Measurement Systems: Object
From tracking point of view, improvements in partial Recognition and Parameter Estimation. Wiley, January 1996.
overlapping, multiple object tracking and occlusions [21] J. Owens and A. Hunter. A fast model-free morphology-based
object tracking algorithm. In Proc. of British Machine
problems can be achieved with more robust algorithm and
Vision Conference, pages 767–776, Cardiff, UK, September 2002.
finally we can get more robust and accurate system for video [22] Zelnio, Edmund G.; Garber, Frederick D Algorithms for Synthetic
surveillance. Aperture Radar Imagery XIV. Proceedings of the SPIE,
Volume 6568, pp. 65680U (2007).
BIBLIOGRAPHY [23] J. Heikkila and O. Silven. A real-time system for
monitoring of cyclists and pedestrians. In Proc. of Second
IEEE Workshop on Visual Surveillance, pages 74–81, Fort
[1] A. J. Lipton, H. Fujiyoshi, and R.S. Patil. Moving target Collins, Colorado, June 1999.
classification and tracking from real-time video. In Proc. of [24] R. Rosales and S. Sclaroff. Improved tracking of multiple humans
Workshop Applications of Computer Vision, pages 129– with trajectory prediction and occlusion modeling. In Proc.
136, 1998. of IEEE CVPR Workshop on the Interpretation of Visual Motion,
[2] L. Wang, W. Hu, and T. Tan. Recent developments in human Santa Barbara, CA, 1998.
motion analysis. Pattern Recognition, 36(3):585– 601, [25] R. Rosales and S. Sclaroff. Improved tracking of multiple humans
March 2003. with trajectory prediction and occlusion modeling. In Proc. of
[3] R. T. Collins et al. A system for video surveillance and IEEE CVPR Workshop on the Interpretation of Visual Motion,
monitoring: VSAM final report. Technical report CMU-RI- Santa Barbara, CA, 1998.
TR-00-12, Robotics Institute, Carnegie Mellon University, [26] R.T. Collins, A.J. Lipton, and T. kanade, “A system for video
May 2000. surveillance and monitoring,” Proceedings of the American
[4] I. Haritaoglu, D. Harwood, and L.S. Davis. W4: A real time Nuclear Society (ANS) Eighth International Topical Meeting on
system for detecting and tracking people. In Computer Vision Robotics and Remote Systems, April, 1999.
and Pattern Recognition, pages 962–967, 1998. [27] I. Haritaoglu, D. Harwood, L.S. Davis, “W4: real-time
[5] C. Stauffer and W. E. L. Grimson. Adaptive background mixture surveillance of people and their activities,” IEEE Trans.
models for real-time tracking. In Proc. of the IEEE Pattern Analysis and Machine Intelligence, vol. 22, no.
RT
Computer Society Conference on Computer Vision and 8, pp.809–830, August 2000.
Pattern Recognition, page 2: 246--252, 1999. [28] C. Stauffer and W.E. Grimson, “Adaptive background mixture
[6] A. M. McIvor. Background subtraction techniques. In Proc.of models for real time tracking,” IEEE Proc. CVPR, pp.246-252,
Image and Vision Computing, Auckland, New Zealand, 2000. June 1999.
IJE
[7] M. Xu and T. Ellis. Colour-Invariant Motion Detection under
Fast Illumination Changes, chapter 8, pages 101–
111.Video-Based SurveillanceSystems. Kluwer Academic
Publishers, Boston, 2002.
ACKNOWLEDGEMENTS
[8] S.J. McKenna, S. Jabri, Z. Duric, and H. Wechsler. Tracking
interacting people. In Proc. of International Conference on
First and for most, I want thank ALLAH (s.w.t), for giving
Automatic Face and Gesture Recognition, pages 348–353,
2000 me the source of power, knowledge and strength to finish the
[10] T. Horprasert, D. Harwood, and L.S. Davis. A statistical approach project and dissertation for completion of my master degree
for real-time robust background subtraction and shadow final project.
detection. In Proc. of IEEE Frame Rate Workshop, pages 1–
I am eager to express my most sincere thankfulness to
19, Kerkyra, Greece, 1999.
[11] H.T. Chen, H.H. Lin, and T.L. Liu. Multi-object tracking using some invaluable people who made this work possible. My
dynamical graphs matching. In Proc. Of IEEE Computer Society gratitude and appreciation go to Prof. Lili, for her always
Conference on Computer Vision and Pattern Recognition, helpful suggestions in discussion and for her support and
pages 210–217, 2001.
guidance in all faiths of this work .Her energy and great
[12] I. Haritaoglu. A Real Time System for Detection and Tracking
of People and Recognizing Their Activities. PhD thesis, vision have inspired me many times; her knowledge and
University of Maryland at College Park, 1998. understanding of science as a whole have made a difficult
[12] X. Zhou, R. T. Collins, T. Kanade, and P. Metes. A master- subject simple, and turned the complicated one into
slave system to acquire biometric imagery of humans at
uncomplicated. Also, I would like to express my sincere
distance. In First ACM SIGMM International Workshop on
Video Surveillance, pages 113–120. ACM Press, 2003. gratitude to my friends in TUTE.
[14] J. Owens and A. Hunter. A fast model-free morphology-based Finally my biggest gratitude is to my family members, my
object tracking algorithm. In Proc. of British Machine Mother, Father, brothers, sisters and my beloved wife Ferdos
Vision Conference, pages 767– 776,Cardiff, UK, Seid, for all their endless love, encouragement and support to
September 2002.
[15] A. Amer. Voting-based simultaneous tracking of multiple video this journey.
objects. In Proc. SPIE Int. Symposium on Electronic Imaging,
pages 500–511, Santa Clara, USA, January 2003.
[16] I. Haritaoglu, D.Harwood, and L.S. Davis. W4: A real time
system for detecting and tracking people. In Computer Vision
and Pattern Recognition, pages 962–967, 1998.
[17] Y. Ivanov, C. Stauffer, A. Bobick, and W.E.L. Grimson. Video
surveillance of interactions.InInternational Workshop on Visual
Surveillance, pages 82–89,Fort Collins, Colorado, June 1999.
IJERTV3IS100721 www.ijert.org 805
(This work is licensed under a Creative Commons Attribution 4.0 International License.)
View publication stats
You might also like
- A Review On Motion Detection TechniquesDocument5 pagesA Review On Motion Detection TechniquesEditor IJTSRDNo ratings yet
- An Intelligent Motion Detection Using Open CVDocument13 pagesAn Intelligent Motion Detection Using Open CVanshupriya380No ratings yet
- Implementation of Human Tracking Using Back Propagation AlgorithmDocument4 pagesImplementation of Human Tracking Using Back Propagation Algorithmpurushothaman sinivasanNo ratings yet
- 10 1109icraie 2018 8710421Document7 pages10 1109icraie 2018 8710421Muhammad NourNo ratings yet
- Study On Self Organizing Approach For Moving Object Detection and Tracking For Visual SurveillanceDocument3 pagesStudy On Self Organizing Approach For Moving Object Detection and Tracking For Visual SurveillanceInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- IJETR021736Document4 pagesIJETR021736erpublicationNo ratings yet
- Surveillance Robot For Tracking Multiple Moving TargetsDocument7 pagesSurveillance Robot For Tracking Multiple Moving Targetspurushothaman sinivasanNo ratings yet
- Live Object Recognition Using YOLODocument5 pagesLive Object Recognition Using YOLOInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Implementation of A Novel Algorithm For Moving Object Tracking in Video SurveillanceDocument9 pagesImplementation of A Novel Algorithm For Moving Object Tracking in Video SurveillancesanjayshelarNo ratings yet
- Object TrackingDocument5 pagesObject TrackingJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- CNN LSTMDocument5 pagesCNN LSTMEngr. Naveed MazharNo ratings yet
- Development of A Dynamic Intelligent Recognition System For A Real-Time Tracking RobotDocument9 pagesDevelopment of A Dynamic Intelligent Recognition System For A Real-Time Tracking RobotIAES International Journal of Robotics and AutomationNo ratings yet
- Real Time Object Detection With Audio Feedback Using Yolo v3Document4 pagesReal Time Object Detection With Audio Feedback Using Yolo v3Editor IJTSRDNo ratings yet
- Motion Object Detection Using Mean Square Error MethodDocument5 pagesMotion Object Detection Using Mean Square Error MethodInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Suveaillance PaperDocument6 pagesSmart Suveaillance Paperanotherser01No ratings yet
- Objects Detection and Extraction in Video Sequences Captured by A Mobile CameraDocument7 pagesObjects Detection and Extraction in Video Sequences Captured by A Mobile Cameraanil kasotNo ratings yet
- Smart Video Surveillance Using YOLO Algorithm and OpenCVDocument8 pagesSmart Video Surveillance Using YOLO Algorithm and OpenCVIJRASETPublications100% (1)
- Naeem2013 PDFDocument6 pagesNaeem2013 PDFImran BashaNo ratings yet
- Object Detection and Recognition Using Tensorflow For Blind PeopleDocument5 pagesObject Detection and Recognition Using Tensorflow For Blind Peoplesivakumar vishnukumarNo ratings yet
- BSPC-D-24-01669_reviewerDocument19 pagesBSPC-D-24-01669_reviewerokuwobiNo ratings yet
- Vision Based Anomalous Human Behaviour Detection Using CNN and Transfer LearningDocument6 pagesVision Based Anomalous Human Behaviour Detection Using CNN and Transfer LearningIJRASETPublicationsNo ratings yet
- Anamolous Behaviour Detection Using Lucas Kanade and Harris Corner DetectorDocument5 pagesAnamolous Behaviour Detection Using Lucas Kanade and Harris Corner DetectorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Ijert Ijert: Moving Object Detection and Velocity Estimation Using MatlabDocument4 pagesIjert Ijert: Moving Object Detection and Velocity Estimation Using MatlabHalit YılNo ratings yet
- Divya Phase 2 ReportDocument51 pagesDivya Phase 2 ReportMost WantedNo ratings yet
- Object Detection Techniques For Mobile Robot Navigation in Dynamic Indoor Environment: A ReviewDocument11 pagesObject Detection Techniques For Mobile Robot Navigation in Dynamic Indoor Environment: A ReviewiajerNo ratings yet
- Image Processing: Object Tracking With Color DetectionDocument14 pagesImage Processing: Object Tracking With Color DetectionAyush MariaNo ratings yet
- Real Time Object Detection Using Deep LearningDocument6 pagesReal Time Object Detection Using Deep LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Literature Review of Object Detection Using YOLOv4 DetectorDocument7 pagesA Literature Review of Object Detection Using YOLOv4 DetectorIJRASETPublicationsNo ratings yet
- Image Object Detection Using Shot Multi-Box Detector (SSMBD) AlgorithmDocument6 pagesImage Object Detection Using Shot Multi-Box Detector (SSMBD) AlgorithmIJRASETPublicationsNo ratings yet
- Abnormal Crowd Detection in Public Places Using OpenCV and Deep LearningDocument6 pagesAbnormal Crowd Detection in Public Places Using OpenCV and Deep LearningIJRASETPublicationsNo ratings yet
- Multi-Stream Siamese and Faster Region-Based Neural Network For Real-Time Object TrackingDocument14 pagesMulti-Stream Siamese and Faster Region-Based Neural Network For Real-Time Object TrackingAnanya SinghNo ratings yet
- Moving Object Detection, Tracking and Destruction SystemDocument45 pagesMoving Object Detection, Tracking and Destruction SystemMahendra KedariNo ratings yet
- PROJECT REPORT Vidoe TrackingDocument27 pagesPROJECT REPORT Vidoe TrackingKunal KucheriaNo ratings yet
- Object Detection Using YOLODocument9 pagesObject Detection Using YOLOIJRASETPublicationsNo ratings yet
- Deep Learning for Real-Time 3D Multi-Object Detection, Localisation, and TrackingDocument15 pagesDeep Learning for Real-Time 3D Multi-Object Detection, Localisation, and TrackingVeeresh AnnigeriNo ratings yet
- Implementation of Real-Time Object Detection System Using Machine Learning AlgorithmDocument12 pagesImplementation of Real-Time Object Detection System Using Machine Learning AlgorithmIJRASETPublications100% (1)
- Moving Object Tracking and Detection in Videos Using MATLAB: A ReviewDocument9 pagesMoving Object Tracking and Detection in Videos Using MATLAB: A ReviewAkhirul HajriNo ratings yet
- Object Detection Using Deep Learning ApproachDocument9 pagesObject Detection Using Deep Learning ApproachIJRASETPublications100% (1)
- Detection of Objects in Motion-A Survey of Video SurveillanceDocument6 pagesDetection of Objects in Motion-A Survey of Video SurveillanceARTHURNo ratings yet
- A Comprehensive Review On Advance Surveillance SystemDocument7 pagesA Comprehensive Review On Advance Surveillance SystemIJRASETPublicationsNo ratings yet
- Suspicious Human Activity Recognition and Alarming SystemDocument11 pagesSuspicious Human Activity Recognition and Alarming SystemIJRASETPublicationsNo ratings yet
- 14166-Article Text-25243-1-10-20231018Document7 pages14166-Article Text-25243-1-10-20231018ahmedalhaswehNo ratings yet
- Computer Vision Based Moving Object Detection and Tracking: Suresh Kumar, Prof. Yatin Kumar AgarwalDocument6 pagesComputer Vision Based Moving Object Detection and Tracking: Suresh Kumar, Prof. Yatin Kumar Agarwalikhwancules46No ratings yet
- Ijaerv10n9spl 339Document9 pagesIjaerv10n9spl 339bhanuprakash15440No ratings yet
- Irjet V7i9677Document3 pagesIrjet V7i9677Nguyễn TuấnNo ratings yet
- The Proposed Design of The Monitoring System For Security Breaches of Buildings Based On Behavioral TrackingDocument5 pagesThe Proposed Design of The Monitoring System For Security Breaches of Buildings Based On Behavioral TrackingGabou BassNo ratings yet
- Ullah 2019Document6 pagesUllah 2019Dinar TASNo ratings yet
- An Empiral Study and Discussions On Multiple Object Tracking: Current State of ArtDocument4 pagesAn Empiral Study and Discussions On Multiple Object Tracking: Current State of ArtEditor IJRITCCNo ratings yet
- A Literature Survey On Applications of Image Processing For Video SurveillanceDocument3 pagesA Literature Survey On Applications of Image Processing For Video SurveillanceInternational Journal of Innovative Science and Research Technology0% (1)
- Image Processing: Object Tracking With Color DetectionDocument15 pagesImage Processing: Object Tracking With Color DetectionAyush MariaNo ratings yet
- Real Time Smart Object Detection Using Machine LearningDocument28 pagesReal Time Smart Object Detection Using Machine LearningIJRASETPublications100% (1)
- Literature Review of Moving Object Detection Using Machine LearningDocument8 pagesLiterature Review of Moving Object Detection Using Machine LearningIJRASETPublicationsNo ratings yet
- Smart SurveillanceDocument9 pagesSmart SurveillanceIJRASETPublicationsNo ratings yet
- 1-s2.0-S2405844023093647-mainDocument19 pages1-s2.0-S2405844023093647-mainAbdullah AbdullahNo ratings yet
- 369IJCTET2016043006Document5 pages369IJCTET2016043006Koush RastogiNo ratings yet
- ICPC 2015 - Object Tracking Techniques SurveyDocument6 pagesICPC 2015 - Object Tracking Techniques SurveyAlexis DieufaitNo ratings yet
- Application of The Composite Materials in IndustriesDocument11 pagesApplication of The Composite Materials in Industrieschethugowda7No ratings yet
- (IJIT-V6I4P11) :madhankumar YDocument6 pages(IJIT-V6I4P11) :madhankumar YIJITJournalsNo ratings yet
- DocumentDocument51 pagesDocumentdileeppatraNo ratings yet
- SLM125Document5 pagesSLM125k2kkhanna105No ratings yet
- UNILAG POSTGRADUATE ENTRANCE EXAMDocument12 pagesUNILAG POSTGRADUATE ENTRANCE EXAMTemitayoNo ratings yet
- 2006 Arawak Languages Encyclopedia of Language and LinguisticsDocument4 pages2006 Arawak Languages Encyclopedia of Language and LinguisticsSheldon JungleNo ratings yet
- Diareea Cronica Constipatia Cronica: Prof. Dr. Mircea DiculescuDocument33 pagesDiareea Cronica Constipatia Cronica: Prof. Dr. Mircea Diculescuasum_1987No ratings yet
- Unified LSG Code 1Document12 pagesUnified LSG Code 1Kerby Kent RetazoNo ratings yet
- Mark Scheme (Results) : Summer 2018Document22 pagesMark Scheme (Results) : Summer 2018RafaNo ratings yet
- The Legend of Magat RiverDocument1 pageThe Legend of Magat RiverMichael Clinton DionedaNo ratings yet
- HelloDocument42 pagesHelloSumit KashyapNo ratings yet
- Kerala University of Health Sciences Faculty of Dentistry BDS Course Regulations and Syllabus 2010Document125 pagesKerala University of Health Sciences Faculty of Dentistry BDS Course Regulations and Syllabus 2010Shyam KrishnanNo ratings yet
- Unit 5 Math-Parent Letter-4th GradeDocument4 pagesUnit 5 Math-Parent Letter-4th Gradeapi-346081420No ratings yet
- Using ABAQUS to Reduce Tire Belt Edge StressesDocument10 pagesUsing ABAQUS to Reduce Tire Belt Edge StressesGautam SharmaNo ratings yet
- LEARNERS BOOK 1 (2) ... ScienceDocument160 pagesLEARNERS BOOK 1 (2) ... SciencehussamNo ratings yet
- European Management Journal: Rainer Lueg, Ronny RadlachDocument14 pagesEuropean Management Journal: Rainer Lueg, Ronny RadlachPutri MutiraNo ratings yet
- Base-12 Numerology Road Map - Blank TemplateDocument6 pagesBase-12 Numerology Road Map - Blank TemplateAli NguyenNo ratings yet
- Pon Vidyashram Group of Cbse Schools STD 8 SCIENCE NOTES (2020-2021)Document3 pagesPon Vidyashram Group of Cbse Schools STD 8 SCIENCE NOTES (2020-2021)Bharath Kumar 041No ratings yet
- Analyzing Your Game Performance Using Event Tracing For WindowsDocument54 pagesAnalyzing Your Game Performance Using Event Tracing For WindowsWahyu ShanNo ratings yet
- SPELLFIRE - Sets Oficiais - XLSX Versão 1Document88 pagesSPELLFIRE - Sets Oficiais - XLSX Versão 1Valdir BarbosaNo ratings yet
- Chapter 8Document3 pagesChapter 8Michelle MartinNo ratings yet
- FORM B1 Photocopiables 3CDocument2 pagesFORM B1 Photocopiables 3CAnka SchoolNo ratings yet
- OTC 17236 The New API RP 2A, 22 Edition Tubular Joint Design PracticeDocument0 pagesOTC 17236 The New API RP 2A, 22 Edition Tubular Joint Design PracticeKrutarth Purohit0% (1)
- 1994 - Non Wood Plant Fibre - Literarture Review - US - fplgtr80 PDFDocument148 pages1994 - Non Wood Plant Fibre - Literarture Review - US - fplgtr80 PDFSrinivas AyyalasomayajulaNo ratings yet
- LF ReportDocument32 pagesLF ReportKrisLarrNo ratings yet
- The Knowledge Integration Strategy Analysis After Geely Acquisition of VolvoDocument4 pagesThe Knowledge Integration Strategy Analysis After Geely Acquisition of VolvoVivi Sabrina BaswedanNo ratings yet
- Topic 1 - Introduction To Technical AnalysisDocument11 pagesTopic 1 - Introduction To Technical AnalysisZatch Series UnlimitedNo ratings yet
- Running A Profitable Construction Company:revisited Break-Even AnalysisDocument13 pagesRunning A Profitable Construction Company:revisited Break-Even AnalysisSrivishnu VardhanNo ratings yet
- Transcript All Without NumberingDocument35 pagesTranscript All Without NumberingJohn Carl AparicioNo ratings yet
- Mama and Mommy and Me in The Middle Press ReleaseDocument2 pagesMama and Mommy and Me in The Middle Press ReleaseCandlewick Press0% (1)
- Philippine Supreme Court Decisions on Constitutionality of LawsDocument64 pagesPhilippine Supreme Court Decisions on Constitutionality of Lawswesternwound82No ratings yet
- Canon Sus 2016 e 03Document2 pagesCanon Sus 2016 e 03Roxanne Tacy SantiagoNo ratings yet
- Labman PDFDocument76 pagesLabman PDFJames OnsachiNo ratings yet