You might also like
- Simultaneous Equations ModelsDocument30 pagesSimultaneous Equations ModelsNISHANTNo ratings yet
- Simultaneous Equations Models ExplainedDocument30 pagesSimultaneous Equations Models Explainedamna yousafNo ratings yet
- Econometrics - Chapter 17 - Simultaneous Equations Models - Shalabh, IIT KanpurDocument30 pagesEconometrics - Chapter 17 - Simultaneous Equations Models - Shalabh, IIT KanpurAmmi JulianNo ratings yet
- Mathemathical economics ch -1Document31 pagesMathemathical economics ch -1kasahun tilahunNo ratings yet
- Modeling Long-Run Relationships in FinanceDocument43 pagesModeling Long-Run Relationships in FinanceInge AngeliaNo ratings yet
- types of macroeconomicsDocument12 pagestypes of macroeconomicsMRS.NAMRATA KISHNANI BSSSNo ratings yet
- Introduction to Simultaneous Equation ModelsDocument18 pagesIntroduction to Simultaneous Equation ModelsGadisa MohammedinNo ratings yet
- Chapter 5Document17 pagesChapter 5Jose C Beraun TapiaNo ratings yet
- Types of Equilibrium in EconomicsDocument19 pagesTypes of Equilibrium in EconomicsSusianti LinNo ratings yet
- Financial Market Microstructure AssignmentDocument12 pagesFinancial Market Microstructure AssignmentMwaura NdutaNo ratings yet
- Seitani (2013) Toolkit For DSGEDocument27 pagesSeitani (2013) Toolkit For DSGEJake BundokNo ratings yet
- Estimating A Regime Switching Pairs Trading Model: Robert J. Elliott and Reza BradraniaDocument16 pagesEstimating A Regime Switching Pairs Trading Model: Robert J. Elliott and Reza Bradraniawilcox99No ratings yet
- Heston Jim GatheralDocument21 pagesHeston Jim GatheralShuo YanNo ratings yet
- MicroUGIntroduction CobwebDocument21 pagesMicroUGIntroduction CobwebMUTATIINA MARKNo ratings yet
- Slide Chapter 1Document20 pagesSlide Chapter 1shalommothapoNo ratings yet
- Chapter 21: Simultaneous Equation Models - IdentificationDocument34 pagesChapter 21: Simultaneous Equation Models - IdentificationLucy SitinjakNo ratings yet
- Chapter 6. Simultaneous EquationsDocument11 pagesChapter 6. Simultaneous EquationsNiken DwiNo ratings yet
- Quantum Stock Market PredictionsDocument13 pagesQuantum Stock Market Predictionsglen_durrantNo ratings yet
- Lecture 1: Stochastic Volatility and Local Volatility: Jim Gatheral, Merrill LynchDocument18 pagesLecture 1: Stochastic Volatility and Local Volatility: Jim Gatheral, Merrill Lynchabhishek210585No ratings yet
- 1 s2.0 S1051137702903098 MainDocument35 pages1 s2.0 S1051137702903098 Mainkajani nesakumarNo ratings yet
- functional relationship and variables economicsDocument5 pagesfunctional relationship and variables economicsmayureshbachhavchessNo ratings yet
- Ec 7Document18 pagesEc 7raymonda.abboud2016No ratings yet
- Model and SimilutDocument15 pagesModel and Similutmir shifayatNo ratings yet
- Estimating stock volatility with Markov regime-switching GARCH modelsDocument11 pagesEstimating stock volatility with Markov regime-switching GARCH modelseduardohortaNo ratings yet
- Microeconomics: Concept of EquilibriumDocument18 pagesMicroeconomics: Concept of EquilibriumshoaibNo ratings yet
- Ch6 Multivariate Time Series ModelsDocument11 pagesCh6 Multivariate Time Series ModelsUsaf SalimNo ratings yet
- 10-Demand Models PDFDocument9 pages10-Demand Models PDFWilfrido CalleNo ratings yet
- Demand System Estimation NewDocument13 pagesDemand System Estimation NewGaurav JakhuNo ratings yet
- Barten 1968Document40 pagesBarten 1968Pedro FelipeNo ratings yet
- About The MS Regress PackageDocument28 pagesAbout The MS Regress PackagegliptakNo ratings yet
- Marshallian & Walrasian Equilibrium AnalysisDocument29 pagesMarshallian & Walrasian Equilibrium AnalysisPalak100% (1)
- AR models for time series analysis and forecastingDocument34 pagesAR models for time series analysis and forecastingjhoms8No ratings yet
- Macro Questionss12Document8 pagesMacro Questionss12paripi99No ratings yet
- Mankiw7e CH14Document34 pagesMankiw7e CH14Pablo PerezNo ratings yet
- Tools of EconomicDocument6 pagesTools of Economicmehaik patwa , 20No ratings yet
- Indecs2007 pp14 20Document7 pagesIndecs2007 pp14 20Dániel TokodyNo ratings yet
- SampleDocument11 pagesSampleGodson OnophurhiNo ratings yet
- Comparing Behavioural and Rational Expectations For The US Post-War EconomyDocument19 pagesComparing Behavioural and Rational Expectations For The US Post-War Economymirando93No ratings yet
- L3 - Academic ScriptDocument10 pagesL3 - Academic ScriptNaomi SaldanhaNo ratings yet
- Market Dynamics. On Supply and Demand Concepts: SSRN Electronic Journal February 2016Document15 pagesMarket Dynamics. On Supply and Demand Concepts: SSRN Electronic Journal February 2016SatNo ratings yet
- Chapter18 Econometrics SUREModelsDocument7 pagesChapter18 Econometrics SUREModelsArka DasNo ratings yet
- ARDL Model Explains Dynamic Relationship Between Economic VariablesDocument18 pagesARDL Model Explains Dynamic Relationship Between Economic VariablesyoussefNo ratings yet
- Economia - Robert Lucas - Some International Evidence On Output-Inflation TradeoffsDocument10 pagesEconomia - Robert Lucas - Some International Evidence On Output-Inflation Tradeoffspetroetpaulo2006No ratings yet
- Original Chapter 3 Elasticity of Demand and SupplyDocument16 pagesOriginal Chapter 3 Elasticity of Demand and SupplyJohn Darrelle de LeonNo ratings yet
- Elasticity of Demand and Supply - SynthesisDocument6 pagesElasticity of Demand and Supply - SynthesisPrincess GonzalesNo ratings yet
- Chaotic model of exchange ratesDocument29 pagesChaotic model of exchange ratesFaisal AzizNo ratings yet
- Mark Up SlidesDocument44 pagesMark Up SlidesWilliam MartinezNo ratings yet
- VAR and CointDocument10 pagesVAR and Cointnnnn1234ssssNo ratings yet
- Macro Impact of InflationDocument31 pagesMacro Impact of InflationneleaforNo ratings yet
- Econometrics Hw-1Document31 pagesEconometrics Hw-1saimaNo ratings yet
- Entropy 21 00530 v2Document10 pagesEntropy 21 00530 v2Guilherme ChagasNo ratings yet
- Curva PhilipsDocument11 pagesCurva PhilipsJose Miguel HuayancaNo ratings yet
- Simona Svoboda - Libor Market Model With Stochastic Volatility PDFDocument66 pagesSimona Svoboda - Libor Market Model With Stochastic Volatility PDFChun Ming Jeffy TamNo ratings yet
- From Implied To Spot Volatilities: Valdo DurrlemanDocument21 pagesFrom Implied To Spot Volatilities: Valdo DurrlemanginovainmonaNo ratings yet
- Real Options Valuation of The License of A Copper MineDocument18 pagesReal Options Valuation of The License of A Copper MineAlvaro MadridNo ratings yet
- Dynamic Interrelationship of Commodity Futures and Other Asset ClassesDocument6 pagesDynamic Interrelationship of Commodity Futures and Other Asset ClassesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Autocorrelation: What Happens If The Error Terms Are Correlated?Document37 pagesAutocorrelation: What Happens If The Error Terms Are Correlated?Lucky Maharani SNo ratings yet
- Emmanuel GincbergDocument37 pagesEmmanuel GincbergLameuneNo ratings yet
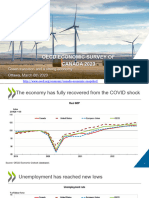
- Canada 2023 OECD-economic-survey PresentationDocument29 pagesCanada 2023 OECD-economic-survey PresentationDomestic RecyclingNo ratings yet
- Accounting Ebook Chapter 7 - AnswersDocument67 pagesAccounting Ebook Chapter 7 - AnswersTEH TZE ANNNo ratings yet
- Econometric SDocument231 pagesEconometric SDomestic RecyclingNo ratings yet
- Economics BSDocument183 pagesEconomics BSDomestic RecyclingNo ratings yet
- Notes On Econometrics I: Grace MccormackDocument50 pagesNotes On Econometrics I: Grace MccormackMd Ibrahim MollaNo ratings yet
- Economics ...................................................................................................................... 2Document10 pagesEconomics ...................................................................................................................... 2helloNo ratings yet
- Analects of A.T. Still-Nature Quotes-UnboundedDocument8 pagesAnalects of A.T. Still-Nature Quotes-UnboundedBruno OliveiraNo ratings yet
- Tugas Bahasa Inggris Analytical Exposition Text: Disusun Oleh: Nama:Hansel Hendrawan Effendy Kelas:XI IPA 1Document4 pagesTugas Bahasa Inggris Analytical Exposition Text: Disusun Oleh: Nama:Hansel Hendrawan Effendy Kelas:XI IPA 1Hansel HendrawanNo ratings yet
- Winter's Bracing Approach RevisitedDocument5 pagesWinter's Bracing Approach RevisitedJitendraNo ratings yet
- Draconis CombineDocument11 pagesDraconis CombineMarco Moracha100% (1)
- Technical Information System Overview Prosafe-Com 3.00 Prosafe-ComDocument49 pagesTechnical Information System Overview Prosafe-Com 3.00 Prosafe-Comshekoofe danaNo ratings yet
- 2019 Implementasie-SamsatdiBaliDocument10 pages2019 Implementasie-SamsatdiBaliDiannita SusantiNo ratings yet
- Pick Pack Ship Public APIDocument19 pagesPick Pack Ship Public APIgauravpuri198050% (2)
- SolidWorks2018 PDFDocument1 pageSolidWorks2018 PDFAwan D'almightyNo ratings yet
- 01 - PV - RESCO 1d Workshop - S1 PDFDocument61 pages01 - PV - RESCO 1d Workshop - S1 PDFDeasy KurniawatiNo ratings yet
- Construction Materials and Testing: "WOOD"Document31 pagesConstruction Materials and Testing: "WOOD"Aira Joy AnyayahanNo ratings yet
- Gen 001 Sas 4Document4 pagesGen 001 Sas 4Michael MarzonNo ratings yet
- Natural GasDocument86 pagesNatural GasNikhil TiwariNo ratings yet
- Etherpad Text-Based TutorialDocument5 pagesEtherpad Text-Based Tutorialapi-437836861No ratings yet
- Rustom Shams PDFDocument48 pagesRustom Shams PDFmtaha85No ratings yet
- Computer ViruesDocument19 pagesComputer ViruesMuhammad Adeel AnsariNo ratings yet
- Cla IdmaDocument160 pagesCla Idmacurotto1953No ratings yet
- Finding The Answers To The Research Questions (Qualitative) : Quarter 4 - Module 5Document39 pagesFinding The Answers To The Research Questions (Qualitative) : Quarter 4 - Module 5Jernel Raymundo80% (5)
- MNCs-consider-career-development-policyDocument2 pagesMNCs-consider-career-development-policySubhro MukherjeeNo ratings yet
- Automatic Repeat Request (Arq)Document15 pagesAutomatic Repeat Request (Arq)Rahul RedkarNo ratings yet
- Tutorial Task 3 - A C P I WK 2Document8 pagesTutorial Task 3 - A C P I WK 2BM70621 Alya Zahirah Binti AziziNo ratings yet
- ForwardMails PDFDocument7 pagesForwardMails PDFJesús Ramón Romero EusebioNo ratings yet
- Manual PDFDocument9 pagesManual PDFRuth ResuelloNo ratings yet
- 2 Integrated MarketingDocument13 pages2 Integrated MarketingPaula Marin CrespoNo ratings yet
- SMC Dialog Plus Conversion To Another SMC 8 - 22 - 2014Document15 pagesSMC Dialog Plus Conversion To Another SMC 8 - 22 - 2014vivek kumarNo ratings yet
- Unit 1Document50 pagesUnit 1vaniphd3No ratings yet
- Frequently Asked Questions About Ailunce HD1: Where Can Find HD1 Software & Firmware?Document5 pagesFrequently Asked Questions About Ailunce HD1: Where Can Find HD1 Software & Firmware?Eric Contra Color0% (1)
- Addressable Fire Detection and Control Miniplex TranspondersDocument8 pagesAddressable Fire Detection and Control Miniplex TranspondersAfdhal SyahrullahNo ratings yet
- Chapter 6 Managing Quality (Sesi 3)Document68 pagesChapter 6 Managing Quality (Sesi 3)Nurmala SariNo ratings yet
- Bai Tap Bo TroDocument6 pagesBai Tap Bo TroKhiết TrangNo ratings yet
- St. Francis de Sales Sr. Sec. School, Gangapur CityDocument12 pagesSt. Francis de Sales Sr. Sec. School, Gangapur CityArtificial GammerNo ratings yet