You might also like
- Study of The Effects of Caster Offset and Kingpin Offset On Kinematics and Lateral Dynamics of Long Wheelbase Solid Axle BusDocument14 pagesStudy of The Effects of Caster Offset and Kingpin Offset On Kinematics and Lateral Dynamics of Long Wheelbase Solid Axle BusSagar S JambukarNo ratings yet
- Handle Bar Vibration MmotorcycleDocument12 pagesHandle Bar Vibration MmotorcycleabhijitNo ratings yet
- Lateral Motion Control of Skid Steering Vehicles Using Full Drive by Wire SystemDocument12 pagesLateral Motion Control of Skid Steering Vehicles Using Full Drive by Wire SystemRishabh AggarwalNo ratings yet
- Mechanical Systems and Signal Processing: Alireza Pazooki, Subhash Rakheja, Dongpu CaoDocument17 pagesMechanical Systems and Signal Processing: Alireza Pazooki, Subhash Rakheja, Dongpu CaoPrakharRastogiNo ratings yet
- Analysis of Superelevation and Side Friction Factor On Horizontal CurveDocument5 pagesAnalysis of Superelevation and Side Friction Factor On Horizontal CurveFrancisco GranadosNo ratings yet
- Evaluation of Dynamic Vehicle Axle Loads On Bridges With Different Surface ConditionsDocument23 pagesEvaluation of Dynamic Vehicle Axle Loads On Bridges With Different Surface ConditionsBridge&StructureNo ratings yet
- Sensors 20 05987 v2Document19 pagesSensors 20 05987 v2Kapil KhatriNo ratings yet
- 07 21-039 OkDocument9 pages07 21-039 OkTạp chí onlineNo ratings yet
- 1 s2.0 S0888327022003193 MainDocument21 pages1 s2.0 S0888327022003193 Mainsamsaptak ghoshNo ratings yet
- Spur GearDocument98 pagesSpur Geargautham_93No ratings yet
- Features of Braking of Multi-Axle Vehicles Depending On The Layout of Their AxlesDocument13 pagesFeatures of Braking of Multi-Axle Vehicles Depending On The Layout of Their AxlesАлександр КNo ratings yet
- Active Vehicle Safety Using Integrated Control ofDocument19 pagesActive Vehicle Safety Using Integrated Control ofakareem1755No ratings yet
- 2004 Analytical Modeling of Bridge-Road-Vehicle Dynamic Interaction System - Nassif &liuDocument28 pages2004 Analytical Modeling of Bridge-Road-Vehicle Dynamic Interaction System - Nassif &liuBridge&StructureNo ratings yet
- JCIE - Vehicle Load - 2004Document11 pagesJCIE - Vehicle Load - 2004Jorge Friné Ramos VargasNo ratings yet
- Optimizing Tire Vertical Stiffness Based On Ride, Handling, Performance and Fuel Consumption CriteriaDocument10 pagesOptimizing Tire Vertical Stiffness Based On Ride, Handling, Performance and Fuel Consumption CriteriafarzadNo ratings yet
- Development of Integrated Control of Electronic Stability ControlDocument6 pagesDevelopment of Integrated Control of Electronic Stability ControlSantiago Puma Puma AraujoNo ratings yet
- Van Der Merwe-MODELLING AND VALIDATION OF ABS AND TYRE INTERACTION-108 A5ed0Document9 pagesVan Der Merwe-MODELLING AND VALIDATION OF ABS AND TYRE INTERACTION-108 A5ed0bách hàNo ratings yet
- Jaisohn Kim Ferris 2024 Adopting The Performance Margin in Horizontal Curve DesignDocument14 pagesJaisohn Kim Ferris 2024 Adopting The Performance Margin in Horizontal Curve DesignroadbugNo ratings yet
- TireDocument1 pageTiremohandgodNo ratings yet
- Theoretical and Experimental Study On Vertical Dynamic Characteristics of Six-Axle Heavy-Haul Locomotive On CurveDocument11 pagesTheoretical and Experimental Study On Vertical Dynamic Characteristics of Six-Axle Heavy-Haul Locomotive On CurveRodrigo Hernández AbarzúaNo ratings yet
- Parametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RDocument6 pagesParametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RInternational Journal of computational Engineering research (IJCER)No ratings yet
- 10 Oodt 7 ZWNMMF O1017Document8 pages10 Oodt 7 ZWNMMF O1017Amit PhadatareNo ratings yet
- Theoretical and Experimental Study of Magneto-Rheological Fluid Disc BrakeDocument12 pagesTheoretical and Experimental Study of Magneto-Rheological Fluid Disc BrakeTasmiaH.ShoilyNo ratings yet
- Parameterization and Modelling of An Offroad Tires and AnalysisDocument9 pagesParameterization and Modelling of An Offroad Tires and AnalysisKranthi P GNo ratings yet
- 2004 - 04 Study of Stability of A Two Wheeled Vehicle MODENADocument11 pages2004 - 04 Study of Stability of A Two Wheeled Vehicle MODENARenan Alves100% (1)
- SSRN Id4396971Document16 pagesSSRN Id4396971José Manuel SoriaNo ratings yet
- Cou Lomb Friction TractionDocument53 pagesCou Lomb Friction TractionsiritapeNo ratings yet
- 347 Binder1 - RideDocument8 pages347 Binder1 - RideReek BhattacharyaNo ratings yet
- A Tire Stiffness Backstepping Observer Dedicated To All-Terrain Vehicle Rollover PreventionDocument19 pagesA Tire Stiffness Backstepping Observer Dedicated To All-Terrain Vehicle Rollover PreventionYash WarkeNo ratings yet
- Examination of ATV Tire Forces Generated On Clay, Grass and Sand SurfacesDocument14 pagesExamination of ATV Tire Forces Generated On Clay, Grass and Sand SurfacesBreno VieiraNo ratings yet
- Skid Resistance Prediction For New Two-Lane Roads: TransportDocument10 pagesSkid Resistance Prediction For New Two-Lane Roads: TransportPhillipy JohnyNo ratings yet
- Adaptive MotionDocument77 pagesAdaptive Motionpatrickcjh5236No ratings yet
- Simulation and Static Analysis of An Off-Road Vehicle Roll CageDocument8 pagesSimulation and Static Analysis of An Off-Road Vehicle Roll CageIJMERNo ratings yet
- Reliability-Based Assessment of Vehicle Safety in Adverse Driving Conditions-1Document14 pagesReliability-Based Assessment of Vehicle Safety in Adverse Driving Conditions-1Bridge&StructureNo ratings yet
- Tire Dynamics Research Application Based On ADAMS/Tire: LIU Xi, LIU Fang-GangDocument4 pagesTire Dynamics Research Application Based On ADAMS/Tire: LIU Xi, LIU Fang-GangerpublicationNo ratings yet
- A Multibody Tool For The Optimization of The SuspeDocument11 pagesA Multibody Tool For The Optimization of The SuspeMei Arief HindartoNo ratings yet
- Modeling and Validation of Off-Road Vehicle Ride DynamicsDocument17 pagesModeling and Validation of Off-Road Vehicle Ride DynamicsAnderson MoribeNo ratings yet
- Tire Treadwear A Comprehensive EvaluatioDocument28 pagesTire Treadwear A Comprehensive EvaluatiokonstantinNo ratings yet
- 0279 Icnsc177Document6 pages0279 Icnsc177josa12No ratings yet
- Estimation of Vehicle Sideslip, Tire Force and Wheel Cornering StiffnessDocument26 pagesEstimation of Vehicle Sideslip, Tire Force and Wheel Cornering Stiffnesssam mufutaNo ratings yet
- Development and Validation of A Model For Predicting Wheel Wear in High-Speed TrainsDocument14 pagesDevelopment and Validation of A Model For Predicting Wheel Wear in High-Speed TrainsEnyew MelesseNo ratings yet
- Flexible Vibration of Rail Vehicle Car Body Induced by Out of Round WheelsDocument24 pagesFlexible Vibration of Rail Vehicle Car Body Induced by Out of Round WheelsAli KasimNo ratings yet
- Combined Bounce, Pitch, and Roll Dynamics of Vehicles Negotiating Single Speed Bump EventsDocument8 pagesCombined Bounce, Pitch, and Roll Dynamics of Vehicles Negotiating Single Speed Bump EventsZibusiso NcubeNo ratings yet
- Influence of Rail, Wheel and Track Geometries On Wheel and Rail DegradationDocument58 pagesInfluence of Rail, Wheel and Track Geometries On Wheel and Rail DegradationhiryanizamNo ratings yet
- Vehicle Stability Optimization Based On Fourteen Degree of Freedom Model and Using of Neural Network ControllerDocument13 pagesVehicle Stability Optimization Based On Fourteen Degree of Freedom Model and Using of Neural Network ControllerErickson OngNo ratings yet
- Chapter - 4-Geometric Design of Highways Horizontal Alignment (Part 2)Document24 pagesChapter - 4-Geometric Design of Highways Horizontal Alignment (Part 2)Tewodros AbateNo ratings yet
- The Basic Nature of Vehicle Understeer-OversteerDocument36 pagesThe Basic Nature of Vehicle Understeer-OversteerRTCNNo ratings yet
- Tire Road Surface Conditions and 2D Curve Analysis Based Development of Surrogate Safety MeasuresDocument8 pagesTire Road Surface Conditions and 2D Curve Analysis Based Development of Surrogate Safety MeasuresbijejournalNo ratings yet
- Development and Analysis of Side Door Intrusion Beam of Suv: Raghvendra Krishana and Shivangi YadavDocument8 pagesDevelopment and Analysis of Side Door Intrusion Beam of Suv: Raghvendra Krishana and Shivangi YadavJayesh ChopadeNo ratings yet
- Analytical Tire ForceDocument40 pagesAnalytical Tire ForcesiritapeNo ratings yet
- Nikhil PawarDocument16 pagesNikhil PawarNikhil PawarNo ratings yet
- An Experimental Study On Lateral Acceleration of CDocument17 pagesAn Experimental Study On Lateral Acceleration of CSasaMiyaaaNo ratings yet
- Vehicle Vibration and Ride 1Document11 pagesVehicle Vibration and Ride 1canup1990No ratings yet
- Influence of The Primary Suspension Damping - Madalina DumitriuDocument16 pagesInfluence of The Primary Suspension Damping - Madalina DumitriudianaNo ratings yet
- Modified Method For Estimating The Static Lateral Stability of Vehicles As Amended by The Design ChangesDocument8 pagesModified Method For Estimating The Static Lateral Stability of Vehicles As Amended by The Design ChangesOluwaloseyi SekoniNo ratings yet
- Dynamic Behavior of Horizontally Curved I-Girder BridgesDocument12 pagesDynamic Behavior of Horizontally Curved I-Girder BridgesWinker Adler GotzerNo ratings yet
- Heavy Vehicle Dynamics Comparison Between Leaf Spring HydropneumaticDocument7 pagesHeavy Vehicle Dynamics Comparison Between Leaf Spring HydropneumaticRajaSekarsajjaNo ratings yet
- Engineering Failure Analysis: Li-Hui Zhao, Song-Lin Zheng, Jin-Zhi FengDocument10 pagesEngineering Failure Analysis: Li-Hui Zhao, Song-Lin Zheng, Jin-Zhi FengShivNo ratings yet
- Applications of Dynamics in Automotive EngineeringDocument10 pagesApplications of Dynamics in Automotive EngineeringUmar Ayaz0% (1)
- Cowl Tag and Hidden VINDocument4 pagesCowl Tag and Hidden VINSgtBilko4321No ratings yet
- Understanding DPF (Diesel Particulate Filter) RegenerationDocument41 pagesUnderstanding DPF (Diesel Particulate Filter) RegenerationBibart Mihaela100% (1)
- Excel Catalogue - 2012 - PerkinsDocument394 pagesExcel Catalogue - 2012 - PerkinsBouslimi Souhaib100% (1)
- Prius Basic InstructionsDocument2 pagesPrius Basic InstructionsModestas MartišiusNo ratings yet
- CAR Daily Vehicle Pre Checks InformationDocument6 pagesCAR Daily Vehicle Pre Checks InformationKhalid AhmedNo ratings yet
- MTU Friedrichshafen: MTU Project No. - Engine DataDocument12 pagesMTU Friedrichshafen: MTU Project No. - Engine DataJercy SanchezNo ratings yet
- Rs45 Series Technical Guide: WWW - Til-Hyster - inDocument8 pagesRs45 Series Technical Guide: WWW - Til-Hyster - inSABAKAKI JOHN100% (1)
- Catalog 2009v1 ScreenDocument81 pagesCatalog 2009v1 ScreenLuis Panti Ek100% (3)
- Jetting How ToDocument1 pageJetting How ToMinibikeTechNo ratings yet
- Gear RatioDocument9 pagesGear RatioLekha SejpalNo ratings yet
- Cummins NTA855Document121 pagesCummins NTA855amat doank100% (2)
- April 18, 2022 List of Pre-Owned Vehicles For Sale: Cut-Off Is Every SundayDocument2 pagesApril 18, 2022 List of Pre-Owned Vehicles For Sale: Cut-Off Is Every SundaySean CanoNo ratings yet
- Fiting Sigurante - PDF Versiunea 1Document95 pagesFiting Sigurante - PDF Versiunea 1mbutiulcaNo ratings yet
- XCT50 Y汽车起重机技术规格书-(合并版本)Document18 pagesXCT50 Y汽车起重机技术规格书-(合并版本)Susti AwanNo ratings yet
- 3 Rear Suspension-N900 Series JMCDocument17 pages3 Rear Suspension-N900 Series JMCRusonegroNo ratings yet
- HD785-5 Parts Book PDFDocument554 pagesHD785-5 Parts Book PDFkathir dray100% (1)
- 164 Dashboard Annotated Ver 2a W-InsertDocument1 page164 Dashboard Annotated Ver 2a W-Insertoleg164No ratings yet
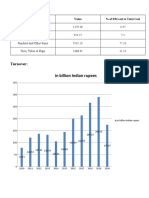
- In Billion Indian Rupees: Raw Material UseDocument4 pagesIn Billion Indian Rupees: Raw Material UseCraft DealNo ratings yet
- JCB 1CX 208S BACKHOE LOADER Service Repair ManualDocument4 pagesJCB 1CX 208S BACKHOE LOADER Service Repair ManualKhaled Awed0% (1)
- YZ250F Matlab DocumentationDocument12 pagesYZ250F Matlab DocumentationvivekpattniNo ratings yet
- Mack Euro4 GU Final ETM 2-13-11TOCDocument11 pagesMack Euro4 GU Final ETM 2-13-11TOCfabioNo ratings yet
- Car Vacuum PumpDocument2 pagesCar Vacuum Pumpramancs1985No ratings yet
- G855 & GTA855: Gas Compression ApplicationsDocument4 pagesG855 & GTA855: Gas Compression ApplicationsSachin SinghNo ratings yet
- Volvo KAD Engine BodyDocument96 pagesVolvo KAD Engine BodyDennis Cezar Mendes100% (16)
- Automotive Piston RingDocument68 pagesAutomotive Piston RingARVINDA KUMARNo ratings yet
- Component Locator: Engine Covers and Component Assemblies (1 of 2)Document24 pagesComponent Locator: Engine Covers and Component Assemblies (1 of 2)Wilmer HuangaNo ratings yet
- Diesel Distributor Fuel-Injection Pumps: Technical InstructionDocument66 pagesDiesel Distributor Fuel-Injection Pumps: Technical InstructioninsanNo ratings yet
- YAMAHA 40HP Parts We Can Supply 2019.8Document3 pagesYAMAHA 40HP Parts We Can Supply 2019.8leonardo ocandoNo ratings yet
- VgrsDocument6 pagesVgrsAnon JansabNo ratings yet
- Torpedo SachsDocument4 pagesTorpedo SachsZIGOBINo ratings yet