You might also like
- Architecture of the 8051 MicrocontrollerDocument41 pagesArchitecture of the 8051 MicrocontrollerAlex MathewNo ratings yet
- 8051 Assembler Language Guide for BeginnersDocument56 pages8051 Assembler Language Guide for BeginnersBharani RajkumarNo ratings yet
- Unit 4Document48 pagesUnit 4formyywork17No ratings yet
- Advanced Topics: 17.1 Hardware Control Using I/O PortsDocument34 pagesAdvanced Topics: 17.1 Hardware Control Using I/O Portsbarbarossa17No ratings yet
- Unit - IV 1. What Is Mean by Microcontroller?: Internal Blocks of MicrocontrollerDocument6 pagesUnit - IV 1. What Is Mean by Microcontroller?: Internal Blocks of MicrocontrollerkesavantNo ratings yet
- Intel 8051mc Architecture & Intel 8085 Microprocessor Family.Document13 pagesIntel 8051mc Architecture & Intel 8085 Microprocessor Family.Abhi SharmaNo ratings yet
- AT89S52Document20 pagesAT89S52Bhargav GoudNo ratings yet
- 8051 Microcontroller GuideDocument78 pages8051 Microcontroller GuideArun JyothiNo ratings yet
- NEC 022 External Paper SolutionDocument13 pagesNEC 022 External Paper SolutionSachin PalNo ratings yet
- MP SoluDocument21 pagesMP SoluAhmad MukaddasNo ratings yet
- Question Bank 1Document18 pagesQuestion Bank 1heligolwala1No ratings yet
- Microcontroller and Risc ArchitectureDocument18 pagesMicrocontroller and Risc ArchitecturesridharanchandranNo ratings yet
- Wa0004Document139 pagesWa0004Sammy HushNo ratings yet
- Embedded Systems & Micro-Controllers - 01-09-2022Document32 pagesEmbedded Systems & Micro-Controllers - 01-09-2022anirudhNo ratings yet
- 8051 Architecture: 8051 Architecture Consists of These FeaturesDocument30 pages8051 Architecture: 8051 Architecture Consists of These Featuresdlwdeadman_monster819100% (1)
- MPMC SougataDocument5 pagesMPMC SougataSherlok HolmesNo ratings yet
- 8051 Asembler I C Programiranje PDFDocument150 pages8051 Asembler I C Programiranje PDFVladimir SimićNo ratings yet
- Features of 8051Document21 pagesFeatures of 8051Basheer V.PNo ratings yet
- AT89S52Document19 pagesAT89S52Nikhith ReddyNo ratings yet
- EMISY Second Test Exemplary Questions Solved-3Document15 pagesEMISY Second Test Exemplary Questions Solved-3YANG LIUNo ratings yet
- Assignment 2Document9 pagesAssignment 2irum khanNo ratings yet
- Unit 4Document108 pagesUnit 4Rasool NayabNo ratings yet
- A Brief Introduction of Micro Controllers 8051Document64 pagesA Brief Introduction of Micro Controllers 8051Pradeep Varma0% (1)
- Intro To Msc51Document41 pagesIntro To Msc51Muhammad Haris HamayunNo ratings yet
- Micro Controller 89c51Document17 pagesMicro Controller 89c51g_prashanth0704075No ratings yet
- 8051 Instruction SetDocument98 pages8051 Instruction SetSmt.N.Vasantha Gowri Assistant ProfessorNo ratings yet
- Unit 5 - Microprocessor & Its Application - WWW - Rgpvnotes.inDocument12 pagesUnit 5 - Microprocessor & Its Application - WWW - Rgpvnotes.inPrayag ParasharNo ratings yet
- Unit 5 - Microprocessor & Its Application - WWW - Rgpvnotes.inDocument13 pagesUnit 5 - Microprocessor & Its Application - WWW - Rgpvnotes.inJayesh JoshiNo ratings yet
- Embedded SystemsDocument9 pagesEmbedded SystemsqasdfghjklwertyNo ratings yet
- Microcontroller Based Down Counter SystemDocument24 pagesMicrocontroller Based Down Counter SystemChandan Bera100% (1)
- Control Unit - 89C52: Introduction About Micro ControllerDocument20 pagesControl Unit - 89C52: Introduction About Micro ControllerSubhashini AruchamyNo ratings yet
- Opcodes 80537Document57 pagesOpcodes 80537Sebas EuNo ratings yet
- Unit-Iv Microcontroller: Course Material (Question Bank)Document5 pagesUnit-Iv Microcontroller: Course Material (Question Bank)kadaNo ratings yet
- 8051 MicrocontrollerDocument32 pages8051 MicrocontrollerRachit Sharma91% (11)
- XCS 234Document20 pagesXCS 234Balaji VenkatesanNo ratings yet
- SAP Report Group 2Document14 pagesSAP Report Group 2Chanel Hooper0% (1)
- AT89s52 MicrocontrollerDocument27 pagesAT89s52 MicrocontrollerDinesh DspNo ratings yet
- 8051 MicrocontrollerDocument31 pages8051 MicrocontrollerRadha RaniNo ratings yet
- MPMC 2 Marks UNIT 4Document14 pagesMPMC 2 Marks UNIT 4satishcoimbato12No ratings yet
- ICT 6641: Advanced Embedded System Lecture 2 Branch, Call and Delay Loops, AVR I/O port programmingDocument23 pagesICT 6641: Advanced Embedded System Lecture 2 Branch, Call and Delay Loops, AVR I/O port programmingSherif HelmyNo ratings yet
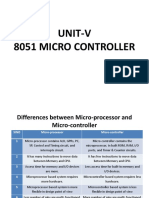
- Unit V 8051 Microcontrollers: Comparison Between Microprocessors and MicrocontrollersDocument15 pagesUnit V 8051 Microcontrollers: Comparison Between Microprocessors and MicrocontrollersAmy OliverNo ratings yet
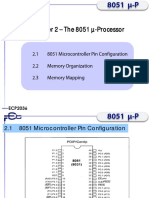
- Chapter 2 - The 8051 Microcontroller (Students)Document44 pagesChapter 2 - The 8051 Microcontroller (Students)Norsyazwani Abdul RashidNo ratings yet
- Scroll Pad: Submitted By: Raman Bedi Amit Sharma Ashish Dhiman Arvind ChauhanDocument48 pagesScroll Pad: Submitted By: Raman Bedi Amit Sharma Ashish Dhiman Arvind Chauhan2gud2beNo ratings yet
- 8051 At89s52Document18 pages8051 At89s52Sanjana SinghNo ratings yet
- CoE3DJ4 Digital Systems Design Hardware SummaryDocument164 pagesCoE3DJ4 Digital Systems Design Hardware SummaryhossamalsherbinyNo ratings yet
- Lab Sheet For Chapter 9Document26 pagesLab Sheet For Chapter 9karnsushantlalNo ratings yet
- Imp MP QuesDocument24 pagesImp MP QuesbhatiaharryjassiNo ratings yet
- Unit Embedded SystemsDocument43 pagesUnit Embedded SystemsJagruthi ReddyNo ratings yet
- Chapter 7 MicrocontrollersDocument7 pagesChapter 7 MicrocontrollerspurushresthaNo ratings yet
- 80c51 Family ArchitectureDocument15 pages80c51 Family Architectureenriquebadajoz5659No ratings yet
- 8051 MicrocontrollerDocument33 pages8051 Microcontrollersweta pattanaikNo ratings yet
- Microprocessor Lab Manual EE0310Document44 pagesMicroprocessor Lab Manual EE0310sathishkumar.vNo ratings yet
- Microprocessor 8085 NotesDocument48 pagesMicroprocessor 8085 NotesDewal ChaturvediNo ratings yet
- Ch3_Part2_insSets_1Document22 pagesCh3_Part2_insSets_1Mengistu BirukeNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Wa0000.Document518 pagesWa0000.Mirza MohammedNo ratings yet
- Gatewise Releases New Online Management Portal For Multifamily CommunitiesDocument2 pagesGatewise Releases New Online Management Portal For Multifamily CommunitiesPR.comNo ratings yet
- Nepali Character Recognition ProjectDocument40 pagesNepali Character Recognition Projectkolaj joshiNo ratings yet
- Manufacturing System in Mechanical EngineeringDocument31 pagesManufacturing System in Mechanical Engineeringkankesh daveNo ratings yet
- Factors That Determine Appropriate Scale for Outsourcing ServicesDocument2 pagesFactors That Determine Appropriate Scale for Outsourcing ServicesAliasNo ratings yet
- Oracle Database Migration With An Oracle Goldengate Hub ConfigurationDocument56 pagesOracle Database Migration With An Oracle Goldengate Hub ConfigurationMohamed Maher AlghareebNo ratings yet
- Rest Quick Start Guide PythonDocument4 pagesRest Quick Start Guide PythonAnderson MunizNo ratings yet
- The Whale Rider - Witi Ihimaera - PDF - Whales - SeaDocument135 pagesThe Whale Rider - Witi Ihimaera - PDF - Whales - SeaPriya Mohinani0% (1)
- PowerShell Commands - PowerShellDocument8 pagesPowerShell Commands - PowerShellJose CorderoNo ratings yet
- C-Arm Philips z10Document12 pagesC-Arm Philips z10muhammad.baghdayNo ratings yet
- HTML Course SlidesDocument75 pagesHTML Course SlidesSriniVasan VasanNo ratings yet
- Yono OfferDocument22 pagesYono Offernaveen_ch522No ratings yet
- Kaspersky Internet Security For Mac 2019 Quick Start GuideDocument4 pagesKaspersky Internet Security For Mac 2019 Quick Start GuideSimbah Lagi Simbah LagiNo ratings yet
- Build custom container images with DockerfilesDocument1 pageBuild custom container images with DockerfilesfbfNo ratings yet
- Year 10 Ict CourseworkDocument6 pagesYear 10 Ict Courseworkbcr9srp4100% (2)
- TocDocument6 pagesTocTugas UtomoNo ratings yet
- Asa5500 Portal CustomizationDocument27 pagesAsa5500 Portal CustomizationAhmet YasarNo ratings yet
- LEED and ASHRAE 90.1 2007 and 2010 App G PRM - User Guide: March 2019Document46 pagesLEED and ASHRAE 90.1 2007 and 2010 App G PRM - User Guide: March 2019Jotham King DennisNo ratings yet
- Digiplex EVO High Security and Access System: Programming GuideDocument72 pagesDigiplex EVO High Security and Access System: Programming GuideBirciu ValiNo ratings yet
- PDF - NSM - NSM Rule Book PG Diploma in HPC March 2024Document24 pagesPDF - NSM - NSM Rule Book PG Diploma in HPC March 2024iamburnedout06No ratings yet
- Payment StringsDocument7 pagesPayment StringsBhavapriyaNo ratings yet
- testo-184T1-T2-T3-Data-sheet (1&2) UpdateDocument4 pagestesto-184T1-T2-T3-Data-sheet (1&2) UpdateAlkes PKRTNo ratings yet
- CMC Course-Instructions To Candidates (V-4)Document6 pagesCMC Course-Instructions To Candidates (V-4)R.T.GobinathanNo ratings yet
- Sample Contract Pack Document: Proposal-Writing-Tips - HTMDocument4 pagesSample Contract Pack Document: Proposal-Writing-Tips - HTMIyaadanNo ratings yet
- Connections and Settings: I/O Adapter 520ADD02Document6 pagesConnections and Settings: I/O Adapter 520ADD02Jafarov VuqarNo ratings yet
- FIITJEE eSchool-Onboarding KitDocument17 pagesFIITJEE eSchool-Onboarding KitnoojeNo ratings yet
- Cad Brief History (Computer Aided Drafting) : Adonis T. Rivera IntructorDocument9 pagesCad Brief History (Computer Aided Drafting) : Adonis T. Rivera IntructorMoneva NancyNo ratings yet
- MS Progress Presentation M Ejaz MalikDocument8 pagesMS Progress Presentation M Ejaz Malikijaz sajjadNo ratings yet
- PLC and HMI Development With Siemens TIA Portal Develop PLC and HMI Programs - Bibis - Ir 1 200 PDFDocument200 pagesPLC and HMI Development With Siemens TIA Portal Develop PLC and HMI Programs - Bibis - Ir 1 200 PDFBruno Jonko Duarte100% (1)
- JFo 4 1 SGDocument51 pagesJFo 4 1 SGSeptyo AdiNo ratings yet