You might also like
- Example - Complete Model of Eng Management ReportDocument38 pagesExample - Complete Model of Eng Management ReportSyah RullacmarNo ratings yet
- Introduction To Major Crop FieldsDocument32 pagesIntroduction To Major Crop FieldsCHANDANINo ratings yet
- Complete HSE document kit for ISO 14001 & ISO 45001 certificationDocument8 pagesComplete HSE document kit for ISO 14001 & ISO 45001 certificationfaroz khanNo ratings yet
- Construction On Soft GroundDocument9 pagesConstruction On Soft GroundyantieschumiNo ratings yet
- Distribution (Weibull) FittingDocument40 pagesDistribution (Weibull) FittingscjofyWFawlroa2r06YFVabfbajNo ratings yet
- Topic 5 Transfer Function Approach To Modeling Dynamic SystemsDocument49 pagesTopic 5 Transfer Function Approach To Modeling Dynamic Systemswenfang lee0% (1)
- Un Authorised Sites Regularisation Within Sept 2009Document2 pagesUn Authorised Sites Regularisation Within Sept 2009Sridhara babu. N - ಶ್ರೀಧರ ಬಾಬು. ಎನ್No ratings yet
- Problem sheet–2 solutionsDocument3 pagesProblem sheet–2 solutionsNitish Kumar YadavNo ratings yet
- FR-F800 Instruction Manual PDFDocument614 pagesFR-F800 Instruction Manual PDFelivandrojuniorNo ratings yet
- Ichalal ISIE 10Document6 pagesIchalal ISIE 10p26q8p8xvrNo ratings yet
- Analysis of Stochastic SIRC Model With Cross Immunity Based On Ornstein-Uhlenbeck ProcessDocument30 pagesAnalysis of Stochastic SIRC Model With Cross Immunity Based On Ornstein-Uhlenbeck ProcessEl-Mehdi FarahNo ratings yet
- Bliman (2018) - A Class of Nonlinear Adaptive Observers For SIR EpidemicDocument7 pagesBliman (2018) - A Class of Nonlinear Adaptive Observers For SIR EpidemicJorge HernándezNo ratings yet
- Sliding Mode Control For Mismatched Uncertain Markov Jump SystemsDocument5 pagesSliding Mode Control For Mismatched Uncertain Markov Jump SystemsWaj DINo ratings yet
- Exponential Stability and Stabilization of Linear Time-Varying Singular SystemDocument4 pagesExponential Stability and Stabilization of Linear Time-Varying Singular Systemgorot1No ratings yet
- An Introduction To Stochastic Epidemic Models-Part IDocument53 pagesAn Introduction To Stochastic Epidemic Models-Part IDavid AriantoNo ratings yet
- Maquin STA 09Document28 pagesMaquin STA 09p26q8p8xvrNo ratings yet
- Global Dynamics of A Predator-Prey System With Holling Type II Functional ResponseDocument12 pagesGlobal Dynamics of A Predator-Prey System With Holling Type II Functional ResponseReyna Mae MarangaNo ratings yet
- Qualitative Behaviour of A Model of An SIRS Epidemic: Stability and PermanenceDocument19 pagesQualitative Behaviour of A Model of An SIRS Epidemic: Stability and Permanenceratchagar aNo ratings yet
- Mathematics: Global Dynamics of An SIQR Model With Vaccination and Elimination Hybrid StrategiesDocument12 pagesMathematics: Global Dynamics of An SIQR Model With Vaccination and Elimination Hybrid StrategiesLeonardo RogérioNo ratings yet
- Mathematical Analysis of Stochastic Models For Tumor-Immune SystemsDocument19 pagesMathematical Analysis of Stochastic Models For Tumor-Immune SystemsRidho PratamaNo ratings yet
- Bliman (2017) - Interval Observers For SIR Epidemic Models Subject To Uncertain SeasonalityDocument9 pagesBliman (2017) - Interval Observers For SIR Epidemic Models Subject To Uncertain SeasonalityJorge HernándezNo ratings yet
- Estimation of Parameters of The Makeham Distribution Using The Least Squares MethodDocument11 pagesEstimation of Parameters of The Makeham Distribution Using The Least Squares MethodhenNo ratings yet
- Chapter 2Document20 pagesChapter 2Fahad AbdullahNo ratings yet
- Some Useful Formulae For Linear SystemsDocument2 pagesSome Useful Formulae For Linear SystemsadityaNo ratings yet
- Mariolis - Norm Bounds - Sraffian Systems - Ams9-12-2010Document24 pagesMariolis - Norm Bounds - Sraffian Systems - Ams9-12-2010Theodore MariolisNo ratings yet
- Uniform Asymptotic Stability of Linear Time-Varying SystemsDocument2 pagesUniform Asymptotic Stability of Linear Time-Varying SystemsqiuqiusbxNo ratings yet
- Lab 05-Study of Systems Using MATLABDocument7 pagesLab 05-Study of Systems Using MATLABSobia ShakeelNo ratings yet
- Gelb ch3 Ocr PDFDocument102 pagesGelb ch3 Ocr PDFbacuoc.nguyen356No ratings yet
- Observability and Controllability Analysis of Nonlinear Systems by Linear MethodsDocument6 pagesObservability and Controllability Analysis of Nonlinear Systems by Linear MethodsHarry DuanNo ratings yet
- Linear Mid1Document55 pagesLinear Mid1丁飞豪No ratings yet
- Assignment 2Document5 pagesAssignment 2Aarav 127No ratings yet
- Inverse Synchronization of Coupled Fractional-Order Systems Through Open-Plus-Closed-Loop ControlDocument12 pagesInverse Synchronization of Coupled Fractional-Order Systems Through Open-Plus-Closed-Loop Controllanoke9980No ratings yet
- 2.160 Identification, Estimation, and Learning Lecture Notes No. 1Document7 pages2.160 Identification, Estimation, and Learning Lecture Notes No. 1Cristóbal Eduardo Carreño MosqueiraNo ratings yet
- Well-Posedness of An Infinite System of Partial Differential Equations Modelling Parasitic Infection in An Age-Structured HostDocument21 pagesWell-Posedness of An Infinite System of Partial Differential Equations Modelling Parasitic Infection in An Age-Structured HostLuis FuentesNo ratings yet
- National Institute of Technology Jalandhar: Faculty CoordinatorDocument4 pagesNational Institute of Technology Jalandhar: Faculty CoordinatorOmprakash VermaNo ratings yet
- Goudas Paper PDFDocument9 pagesGoudas Paper PDFJaime Fisica RedolfoNo ratings yet
- Fixed Length of Infective Period For Attacking Worms in Computer NetworkDocument13 pagesFixed Length of Infective Period For Attacking Worms in Computer Networkglobal-marketin8184No ratings yet
- Unit 4 NDocument33 pagesUnit 4 Nharish9No ratings yet
- Journal of Sound and Vibration 1997 - v200 31-40Document10 pagesJournal of Sound and Vibration 1997 - v200 31-40Franco VillanuevaNo ratings yet
- Linear Systems ReviewDocument14 pagesLinear Systems Reviewمحمد أشرف حسنNo ratings yet
- DSAS 1 Static and Dynamic Systems 2013Document4 pagesDSAS 1 Static and Dynamic Systems 2013Bhupesh KumarNo ratings yet
- IEEE Transactions on Fuzzy Systems Article on Robust StabilizationDocument13 pagesIEEE Transactions on Fuzzy Systems Article on Robust StabilizationAhmed TaharNo ratings yet
- Lecture03 (Math Rep1)Document73 pagesLecture03 (Math Rep1)kajela25No ratings yet
- Integer Autoregressive Models With Structural BreaksDocument18 pagesInteger Autoregressive Models With Structural BreaksAkanksha KashikarNo ratings yet
- SPRING 2003 C A.H. Techet & M.S. Triantafyllou: T T 3 3 1 1 N N 1Document13 pagesSPRING 2003 C A.H. Techet & M.S. Triantafyllou: T T 3 3 1 1 N N 1bzuiaoqNo ratings yet
- Module-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughDocument27 pagesModule-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughMehul MayankNo ratings yet
- Cai. Z (1996)Document9 pagesCai. Z (1996)KarimaNo ratings yet
- Beretta (1995) - Global Stability of An SIR Epidemic Model With Time DelaysDocument11 pagesBeretta (1995) - Global Stability of An SIR Epidemic Model With Time DelaysJorge HernándezNo ratings yet
- 1 s2.0 S0898122109005598 Main PDFDocument12 pages1 s2.0 S0898122109005598 Main PDFWahid wardakNo ratings yet
- ELE 301: Signals and Systems: Prof. Paul CuffDocument28 pagesELE 301: Signals and Systems: Prof. Paul CuffcartamenesNo ratings yet
- Regulator problemDocument10 pagesRegulator problemcarriegosNo ratings yet
- Original Paper: Monika Bakošová, Dalibor Puna, Petr Dostál, Jana ZávackáDocument10 pagesOriginal Paper: Monika Bakošová, Dalibor Puna, Petr Dostál, Jana ZávackáJaime Leal NavarroNo ratings yet
- Qualitative Analysis of An Seis Epidemic Model With Nonlinear Incidence RateDocument6 pagesQualitative Analysis of An Seis Epidemic Model With Nonlinear Incidence Ratediyar001No ratings yet
- Analysis of Covid-19 disease using fractional order SEIR modelDocument9 pagesAnalysis of Covid-19 disease using fractional order SEIR modelponcoNo ratings yet
- ChiCC 2018 8482992Document4 pagesChiCC 2018 8482992Bá Linh NguyễnNo ratings yet
- Nonlinear Growth ModelsDocument9 pagesNonlinear Growth ModelsinternetidentityscriNo ratings yet
- July 1, 2009 11:54 WSPC/102-IDAQPRT 00360Document17 pagesJuly 1, 2009 11:54 WSPC/102-IDAQPRT 00360Mehdi RezaieNo ratings yet
- Process ConvolutionDocument72 pagesProcess ConvolutionayadmanNo ratings yet
- Camacho 2007Document32 pagesCamacho 2007Luis CarvalhoNo ratings yet
- SIR Models: An Introduction: Tingda Wang July 2020Document19 pagesSIR Models: An Introduction: Tingda Wang July 2020Zan DaoNo ratings yet
- 1.1 Preliminary Remarks: Objective and Motiva-Tion: Nic95 NN07 May74 Mur01 Smi78 SB06 NP77Document26 pages1.1 Preliminary Remarks: Objective and Motiva-Tion: Nic95 NN07 May74 Mur01 Smi78 SB06 NP77anil ariNo ratings yet
- Clases IdentificaciónDocument42 pagesClases IdentificaciónGustavo SánchezNo ratings yet
- Classical and Bayesian Estimations On The Generalized Exponential Distribution Using Censored DataDocument15 pagesClassical and Bayesian Estimations On The Generalized Exponential Distribution Using Censored DataSuhail AshrafNo ratings yet
- Robust Stabilization of A Class of Time-Delay Nonlinear Systems WithmarkovianjumpDocument5 pagesRobust Stabilization of A Class of Time-Delay Nonlinear Systems WithmarkovianjumpAhmed TaharNo ratings yet
- Journal of Mathematical Analysis and Applications: Optimal Control of Semilinear Parabolic Systems With State ConstraintDocument17 pagesJournal of Mathematical Analysis and Applications: Optimal Control of Semilinear Parabolic Systems With State ConstraintHùng PhạmNo ratings yet
- 1 s2.0 S1007570422003653 MainDocument15 pages1 s2.0 S1007570422003653 MainEl-Mehdi FarahNo ratings yet
- 1 s2.0 S1007570422003653 MainDocument15 pages1 s2.0 S1007570422003653 MainEl-Mehdi FarahNo ratings yet
- 1 s2.0 S2666818121001121 MainDocument12 pages1 s2.0 S2666818121001121 MainEl-Mehdi FarahNo ratings yet
- 1 s2.0 S2211379721002783 MainDocument14 pages1 s2.0 S2211379721002783 MainEl-Mehdi FarahNo ratings yet
- 1 s2.0 S0378437123001607 MainDocument20 pages1 s2.0 S0378437123001607 MainEl-Mehdi FarahNo ratings yet
- SRX835 Spec Sheet - 11 - 11 - 19Document4 pagesSRX835 Spec Sheet - 11 - 11 - 19Eric PageNo ratings yet
- Tech Note FormatDocument2 pagesTech Note FormatUgonna OhiriNo ratings yet
- PSE Archery2015 RecurveDocument10 pagesPSE Archery2015 RecurvecarlheindlNo ratings yet
- Ulliensb PDF 1516040087Document30 pagesUlliensb PDF 1516040087Jose Daniel ArangoNo ratings yet
- Ok 1889 - PDF PDFDocument40 pagesOk 1889 - PDF PDFIngeniería Industrias Alimentarias ItsmNo ratings yet
- TUTO 4 PU Sol PDFDocument21 pagesTUTO 4 PU Sol PDFVievie Le BluewberrietrufflesNo ratings yet
- Khor Al Maqta Project Near AFOCH HotelDocument2 pagesKhor Al Maqta Project Near AFOCH HotelDennis Michael P. EscobarNo ratings yet
- FEA Finite Element Analysis Tutorial ProblemsDocument16 pagesFEA Finite Element Analysis Tutorial ProblemsVinceTanNo ratings yet
- ED621826Document56 pagesED621826A. MagnoNo ratings yet
- Sample Project ReportDocument77 pagesSample Project ReportChavda ashwinNo ratings yet
- Preface: What Is Financial Intelligence?Document4 pagesPreface: What Is Financial Intelligence?Iuliana GondosNo ratings yet
- Equalization of Lithium-Ion Battery Pack Based On Fuzzy Logic Control in Electric VehicleDocument10 pagesEqualization of Lithium-Ion Battery Pack Based On Fuzzy Logic Control in Electric VehicleSureshNo ratings yet
- Datasheet of DS 7608NI Q1 - 8P NVRD - V4.71.200 - 20220705Document5 pagesDatasheet of DS 7608NI Q1 - 8P NVRD - V4.71.200 - 20220705Gherel TocasNo ratings yet
- Atlantic Revolutions: Ogé Insurrection Inspired Haitian IndependenceDocument18 pagesAtlantic Revolutions: Ogé Insurrection Inspired Haitian IndependenceNiara ChaneyNo ratings yet
- 144-WARA AD 2.1 To AD 2.24 AIRAC AIP AMDT 125 26 JAN 23Document9 pages144-WARA AD 2.1 To AD 2.24 AIRAC AIP AMDT 125 26 JAN 23latsar kusumoNo ratings yet
- Consideration PropDocument2 pagesConsideration PropQasim GorayaNo ratings yet
- SSRN Id983401Document43 pagesSSRN Id983401LeilaNo ratings yet
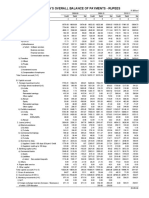
- Table 141: India'S Overall Balance of Payments - RupeesDocument2 pagesTable 141: India'S Overall Balance of Payments - Rupeesmahbobullah rahmaniNo ratings yet
- Manual ZappyDocument9 pagesManual Zappyapi-45129352No ratings yet
- The King's Avatar - A Compilatio - Butterfly BlueDocument8,647 pagesThe King's Avatar - A Compilatio - Butterfly BlueDarka gamesNo ratings yet
- Terex-CC8800 1 Twin B1 200808Document8 pagesTerex-CC8800 1 Twin B1 200808pvs12684No ratings yet
- Analysis and Design of BeamsDocument12 pagesAnalysis and Design of BeamsHasanain AlmusawiNo ratings yet
- Theory of Planned Behaviour (TPB)Document18 pagesTheory of Planned Behaviour (TPB)Afiq Wahyu AjiNo ratings yet
- Unit 4:: Incident Commander and Command Staff FunctionsDocument16 pagesUnit 4:: Incident Commander and Command Staff FunctionsAntonio Intia IVNo ratings yet