You might also like
- LST - Spring 2015 - Lecture - Week 1-2Document19 pagesLST - Spring 2015 - Lecture - Week 1-2Waseem ChNo ratings yet
- S&S - Week 7Document20 pagesS&S - Week 7machasong98No ratings yet
- Control - Linear System Theory1Document178 pagesControl - Linear System Theory1Amruth ThelkarNo ratings yet
- Signal and System Analysis Lab: ELG3125BDocument19 pagesSignal and System Analysis Lab: ELG3125BDongshen WangNo ratings yet
- LECTURE3 - ENT281 - Chapter 1 (Part3) - 1Document26 pagesLECTURE3 - ENT281 - Chapter 1 (Part3) - 1Yip Tuck WaiNo ratings yet
- CH 2 System and PropertiesDocument99 pagesCH 2 System and PropertiesPUSPA JOSHINo ratings yet
- Signals and Systems: ELCE 301 Continuous-Time SystemsDocument26 pagesSignals and Systems: ELCE 301 Continuous-Time SystemsLittle VoiceNo ratings yet
- CH 1Document12 pagesCH 1Keneni AlemayehuNo ratings yet
- L3 LTI SystemsDocument28 pagesL3 LTI SystemsAnshuman PandeyNo ratings yet
- Chapter 4 CT - LTI Systems + Convolution IntegralDocument20 pagesChapter 4 CT - LTI Systems + Convolution Integral蓝蓝のDoraemonNo ratings yet
- EEE223 Lec5 HandoutsDocument4 pagesEEE223 Lec5 HandoutsFarhan Khan NiaZiNo ratings yet
- Sung2011 Article RobustObserver-basedFuzzyContrDocument8 pagesSung2011 Article RobustObserver-basedFuzzyContrMohammed BenNo ratings yet
- Delay-Dependent Robust H Control of Time-Delay Systems: M. Sun Y. JiaDocument9 pagesDelay-Dependent Robust H Control of Time-Delay Systems: M. Sun Y. JiainfodotzNo ratings yet
- Control SystemDocument11 pagesControl Systembalaji1986No ratings yet
- Stability Conditions For Integral Delay Systems: Daniel Melchor-Aguilar, Vladimir Kharitonov and Rogelio LozanoDocument15 pagesStability Conditions For Integral Delay Systems: Daniel Melchor-Aguilar, Vladimir Kharitonov and Rogelio LozanojavbejaranoNo ratings yet
- CH 1Document11 pagesCH 1tarekegn utaNo ratings yet
- EEE221 Lec2 PDFDocument62 pagesEEE221 Lec2 PDFMd. Nazmul Huda 1610805643No ratings yet
- Basics of Control SystemsDocument15 pagesBasics of Control SystemsSiva KumarNo ratings yet
- Module-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughDocument27 pagesModule-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughMehul MayankNo ratings yet
- Brief Paper Global Output Feedback Stabilisation For A Class of Uncertain Non-Linear SystemsDocument9 pagesBrief Paper Global Output Feedback Stabilisation For A Class of Uncertain Non-Linear SystemsCom DigfulNo ratings yet
- Exponential Stability and Stabilization of Linear Time-Varying Singular SystemDocument4 pagesExponential Stability and Stabilization of Linear Time-Varying Singular Systemgorot1No ratings yet
- Introduction To Signals & Variables Lecture-3Document14 pagesIntroduction To Signals & Variables Lecture-3seltyNo ratings yet
- Anh Adaptive Observer Design For Linear Descriptor SystemsDocument6 pagesAnh Adaptive Observer Design For Linear Descriptor Systemsghassen marouaniNo ratings yet
- 3 Discrete Time SystemsDocument40 pages3 Discrete Time SystemsNur Razanah Mohd YasinNo ratings yet
- Ichalal ISIE 10Document6 pagesIchalal ISIE 10p26q8p8xvrNo ratings yet
- Observer Design For Discrete-Time Singular Systems With Time-Varying DelayDocument6 pagesObserver Design For Discrete-Time Singular Systems With Time-Varying Delayghassen marouaniNo ratings yet
- Nonlinear Control Systems - A Brief IntroductionDocument9 pagesNonlinear Control Systems - A Brief IntroductionSwapnil KanadeNo ratings yet
- Navtej Mishra 19116043: Experiment - 1: Study of Linear-Time-Invariant Open-Loop Systems and Their RepresentationsDocument24 pagesNavtej Mishra 19116043: Experiment - 1: Study of Linear-Time-Invariant Open-Loop Systems and Their RepresentationsNavtej MishraNo ratings yet
- Observing: The State of Linear SystemDocument7 pagesObserving: The State of Linear Systemjuan carlos molano toroNo ratings yet
- Stabilization and Control Over Gaussian NetworksDocument48 pagesStabilization and Control Over Gaussian NetworksFan ZhangNo ratings yet
- Signals and Systems: by P. Gokul KrishnaDocument15 pagesSignals and Systems: by P. Gokul KrishnakrishnaNo ratings yet
- 10.1007/s11768 006 6053 8Document7 pages10.1007/s11768 006 6053 8ghassen marouaniNo ratings yet
- LTI SystemsDocument14 pagesLTI SystemsSultana AyeshaNo ratings yet
- Lec07-12 - CT SystemsDocument72 pagesLec07-12 - CT SystemsDaniya AbbasiNo ratings yet
- Alkafeel University Engineering College Department of Computer Techniques EngineeringDocument9 pagesAlkafeel University Engineering College Department of Computer Techniques Engineeringمحمد مهدي الحسينيNo ratings yet
- Dynamic Predictor For Systems With State and Input Delay: A Time-Domain Robust Stability AnalysisDocument15 pagesDynamic Predictor For Systems With State and Input Delay: A Time-Domain Robust Stability AnalysisAnonymous HUY0yRexYfNo ratings yet
- Topic 3 Introduction To SystemsDocument7 pagesTopic 3 Introduction To SystemsRona SharmaNo ratings yet
- A Switching Controller For Uncertain Nonlinear Systems: Lecture NotesDocument8 pagesA Switching Controller For Uncertain Nonlinear Systems: Lecture NotesEzequiel PezoNo ratings yet
- Note 1474517442Document16 pagesNote 1474517442alfonsNo ratings yet
- 3-Classification of Signals and Systems-05!01!2024Document21 pages3-Classification of Signals and Systems-05!01!2024rupinsgmNo ratings yet
- Signals and Systems: Lecture #2: Introduction To SystemsDocument8 pagesSignals and Systems: Lecture #2: Introduction To Systemsking_hhhNo ratings yet
- Lti Systems: Dr. Muhammad HanifDocument32 pagesLti Systems: Dr. Muhammad HanifTaimoor KhanNo ratings yet
- Handout 4Document20 pagesHandout 4hamza shahbazNo ratings yet
- Observability of Fractional Linear Systems With Singularity: Dengguo Xu, Qinglin Wang, Yuan LiDocument5 pagesObservability of Fractional Linear Systems With Singularity: Dengguo Xu, Qinglin Wang, Yuan LiHarry DuanNo ratings yet
- Chapter 1 Signals and Systems - Audio#2 - ContinuedDocument31 pagesChapter 1 Signals and Systems - Audio#2 - ContinuedyonalsderantauNo ratings yet
- Chapter 2Document20 pagesChapter 2Fahad AbdullahNo ratings yet
- ESE242 Chapter 2Document12 pagesESE242 Chapter 2olivefieraNo ratings yet
- CHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsDocument6 pagesCHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsIzzat AzmanNo ratings yet
- EGR214B1 19 16LSp1Document19 pagesEGR214B1 19 16LSp1sultanNo ratings yet
- Computers and Mathematics With Applications: Yan Li, Yangquan Chen, Igor PodlubnyDocument12 pagesComputers and Mathematics With Applications: Yan Li, Yangquan Chen, Igor PodlubnykarpagasenthilpandyNo ratings yet
- LECTURE 4 Sytetms ClassificationDocument42 pagesLECTURE 4 Sytetms ClassificationEzzadin AbdowahabNo ratings yet
- Signals Systems Lab 2Document5 pagesSignals Systems Lab 2ahmad.a.touseefNo ratings yet
- 1 s2.0 S0016003221004014 MainDocument17 pages1 s2.0 S0016003221004014 MainBảo TôNo ratings yet
- Decentralized Adaptive Control Scheme For Control of A Multi Arm Type RobotDocument9 pagesDecentralized Adaptive Control Scheme For Control of A Multi Arm Type Robotkarthikchandran1986No ratings yet
- Linear Time-Invariant System (LTI)Document36 pagesLinear Time-Invariant System (LTI)AbcdNo ratings yet
- Systems ClassDocument53 pagesSystems ClassBhetariya PareshNo ratings yet
- CHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsDocument6 pagesCHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsIzzat AzmanNo ratings yet
- Easy ChairDocument6 pagesEasy ChairclaudyaneNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Proportional Integral Observer (PIO) Design For Linear Control SyDocument69 pagesProportional Integral Observer (PIO) Design For Linear Control SyBá Linh NguyễnNo ratings yet
- Tac 2006 875019Document5 pagesTac 2006 875019Bá Linh NguyễnNo ratings yet
- J Matcom 2011 07 010Document11 pagesJ Matcom 2011 07 010Bá Linh NguyễnNo ratings yet
- Bak H Shande 2015Document6 pagesBak H Shande 2015Bá Linh NguyễnNo ratings yet
- Isie 2001 931628Document5 pagesIsie 2001 931628Bá Linh NguyễnNo ratings yet
- Control of Uncertain Systems With Guaranteed PerfoDocument7 pagesControl of Uncertain Systems With Guaranteed PerfoBá Linh NguyễnNo ratings yet
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterDocument21 pagesAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnNo ratings yet
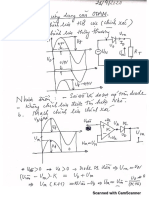
- Chương 2 - Khuếch đại thuật toán (tiếp theo) - Các mạch KĐ cơ bản 14-4-2020Document8 pagesChương 2 - Khuếch đại thuật toán (tiếp theo) - Các mạch KĐ cơ bản 14-4-2020Bá Linh NguyễnNo ratings yet
- Week 3 - Direct Current MetersDocument32 pagesWeek 3 - Direct Current MetersBá Linh NguyễnNo ratings yet
- Bài tập chương 2 (21-4-2020)Document4 pagesBài tập chương 2 (21-4-2020)Bá Linh NguyễnNo ratings yet
- Chương 2 - Mạch Chỉnh Lưu Chính Xác (21-4-2020)Document6 pagesChương 2 - Mạch Chỉnh Lưu Chính Xác (21-4-2020)Bá Linh NguyễnNo ratings yet
- Week 3 - Direct Current MetersDocument32 pagesWeek 3 - Direct Current MetersBá Linh NguyễnNo ratings yet
- Applied III, Worksheet 1Document4 pagesApplied III, Worksheet 1mintuwondeNo ratings yet
- Physics: Paper 2Document16 pagesPhysics: Paper 2Mhmd AlrashedNo ratings yet
- Part 5 MT Drives and Mechanisms 1Document11 pagesPart 5 MT Drives and Mechanisms 1Anonymous YaJlLHYNo ratings yet
- F5 KSSM Tutorial 1.1 (Force and Motion Ii)Document13 pagesF5 KSSM Tutorial 1.1 (Force and Motion Ii)Alia Qistina Mara KasmedeeNo ratings yet
- Ixef 1032Document2 pagesIxef 1032Michele RodriquezNo ratings yet
- The In-Situ Measurement of The Undrained Shear Strength of Clays Using The Field VaneDocument1 pageThe In-Situ Measurement of The Undrained Shear Strength of Clays Using The Field VaneLeo ChandraNo ratings yet
- PAL 03 3011 Mini Squirt ApplicatorDocument2 pagesPAL 03 3011 Mini Squirt ApplicatorJOSEANTONIO2001No ratings yet
- 8620 Wearable Ring Scanner Data Sheet en PDFDocument2 pages8620 Wearable Ring Scanner Data Sheet en PDFDinesh Kumar DhundeNo ratings yet
- Bearing Basics For Gas-Industry Screw CompressorsDocument5 pagesBearing Basics For Gas-Industry Screw CompressorsDayo IdowuNo ratings yet
- Review Module 24 Geotechnical Engineering 5 Part 2Document2 pagesReview Module 24 Geotechnical Engineering 5 Part 2John Andre MarianoNo ratings yet
- Design of A New Low Cost ROV VehicleDocument6 pagesDesign of A New Low Cost ROV VehicleMuhammad Yasar JavaidNo ratings yet
- Crop CircleDocument2 pagesCrop CircledotionmoNo ratings yet
- Development of A Belt Conveyor For Small Scale Industry: September 2017Document6 pagesDevelopment of A Belt Conveyor For Small Scale Industry: September 2017DatNo ratings yet
- Rockwell Round Correction ChartsDocument2 pagesRockwell Round Correction Chartsdarwin_huaNo ratings yet
- Syllabus - EE 211L - Electrical Circuits 1Document8 pagesSyllabus - EE 211L - Electrical Circuits 1Miko F. RodriguezNo ratings yet
- Frac To GraphyDocument639 pagesFrac To GraphyBHARANINo ratings yet
- SETTLING VELOCITY 2.1 - Calculations of Sedimentation Velocity and Hindered Settling Rate of ParticlesDocument74 pagesSETTLING VELOCITY 2.1 - Calculations of Sedimentation Velocity and Hindered Settling Rate of ParticlesSonu Singh100% (4)
- Pave RuttingDocument440 pagesPave RuttingbloomdidoNo ratings yet
- Monitored Natural Attenuation Toolkit For Evaluation 1 and 2 - Combined FINAL PDFDocument176 pagesMonitored Natural Attenuation Toolkit For Evaluation 1 and 2 - Combined FINAL PDFcaraballoaleNo ratings yet
- Iso Dis 50006Document54 pagesIso Dis 50006abimanyubawono100% (3)
- Installation Manual: Remote User InterfaceDocument12 pagesInstallation Manual: Remote User InterfaceALEKSANDARNo ratings yet
- AdventureDocument2 pagesAdventureAanya NarayanNo ratings yet
- Extending Kettle LifeDocument7 pagesExtending Kettle LifeSky Ong CwNo ratings yet
- Valve and Pipeline Design Notes - Part 1Document29 pagesValve and Pipeline Design Notes - Part 1Anilduth Baldan100% (2)
- Lec 1 PrintDocument13 pagesLec 1 PrintPolito PogbaNo ratings yet
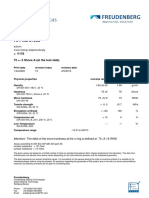
- FST - 70 FKM 37508 enDocument2 pagesFST - 70 FKM 37508 enXavierNo ratings yet
- Visible Emission of Hydrogen FlamesDocument8 pagesVisible Emission of Hydrogen FlamesgajodharlauduNo ratings yet
- Bond Characteristics High-Strength Steel ReinforcementDocument6 pagesBond Characteristics High-Strength Steel ReinforcementUmair BaigNo ratings yet
- Laboratory Report - EvaporationDocument14 pagesLaboratory Report - EvaporationWayne Tandingan0% (1)
- Tugas Metalurgi LasDocument16 pagesTugas Metalurgi LasMizan100% (2)