You might also like
- Vertical Learning Progression Map Across Grade LevelsDocument3 pagesVertical Learning Progression Map Across Grade LevelsKatherine Pagas Galupo100% (1)
- Rmrs 2012 Kochendorfer j001Document16 pagesRmrs 2012 Kochendorfer j001andi suntoroNo ratings yet
- S. R. Beagley Et Al - First Multi-Year Occultation Observations of CO2 in The MLT by ACE Satellite: Observations and Analysis Using The Extended CMAMDocument37 pagesS. R. Beagley Et Al - First Multi-Year Occultation Observations of CO2 in The MLT by ACE Satellite: Observations and Analysis Using The Extended CMAMDamxz5No ratings yet
- Assessment of Long-Term WRF-CMAQ Simulations For Understanding Direct Aerosol Effects On Radiation "Brightening" in The United StatesDocument17 pagesAssessment of Long-Term WRF-CMAQ Simulations For Understanding Direct Aerosol Effects On Radiation "Brightening" in The United StatesMelvin DanginNo ratings yet
- Gordon 2018Document20 pagesGordon 2018César AguirreNo ratings yet
- Database Evaluation For Semi-Empirical Methods Applied To Coaxial Jet Noise PredictionDocument10 pagesDatabase Evaluation For Semi-Empirical Methods Applied To Coaxial Jet Noise PredictionAnds ProençaNo ratings yet
- 2009 Hill Lackmann TCPBLDocument21 pages2009 Hill Lackmann TCPBLThomas LakasNo ratings yet
- On The Theory of SODAR Measurement Techniques: Risø-R-1410 (EN)Document60 pagesOn The Theory of SODAR Measurement Techniques: Risø-R-1410 (EN)jlsinghNo ratings yet
- Open Field Cup Anemometry: DEWI Magazin Nr. 19, August 2001Document6 pagesOpen Field Cup Anemometry: DEWI Magazin Nr. 19, August 2001Muqtaf NajichNo ratings yet
- N S F F W F C T: A Umerical Imulation of LOW Ield INA IND Arm On Omplex ErrainDocument8 pagesN S F F W F C T: A Umerical Imulation of LOW Ield INA IND Arm On Omplex ErrainkumaryrkNo ratings yet
- Verboven 2007Document13 pagesVerboven 2007sohcahtoaNo ratings yet
- Amt 2020 479Document27 pagesAmt 2020 479Bùi Thanh AnNo ratings yet
- Mean and Extreme Precipitation Over European RiverDocument26 pagesMean and Extreme Precipitation Over European RiversallyNo ratings yet
- Energies 12 01988Document15 pagesEnergies 12 01988Nadjib GioNo ratings yet
- Jurnal TPSDocument12 pagesJurnal TPSNurul HabibahNo ratings yet
- Wind Tunnel Methods2Document21 pagesWind Tunnel Methods2mdkml2100% (1)
- Mellor & Yamada - Support DocsDocument20 pagesMellor & Yamada - Support DocsLeonardo MichelsNo ratings yet
- Applied Sciences: Acoustic Wave Propagation in Air-Filled Pipes Using Finite Element AnalysisDocument20 pagesApplied Sciences: Acoustic Wave Propagation in Air-Filled Pipes Using Finite Element AnalysissangramppNo ratings yet
- ETP HydrolDocument14 pagesETP HydrolAndres CastilloNo ratings yet
- Wind Forecasts For Wind Power Generation Using The Eta ModelDocument8 pagesWind Forecasts For Wind Power Generation Using The Eta ModelPuja Dwi LestariNo ratings yet
- Adverse Local Wind Effects On Neighbouring BuildingsDocument11 pagesAdverse Local Wind Effects On Neighbouring BuildingsOkke BronkhorstNo ratings yet
- Modeling Threshold Exceedance Probabilities of Spatially Correlated Time SeriesDocument16 pagesModeling Threshold Exceedance Probabilities of Spatially Correlated Time SeriesBlasco Ruiz ArancibiaNo ratings yet
- Dynamic Response of Real Offshore Wind Turbines On Monopiles in Stratified SeabedDocument16 pagesDynamic Response of Real Offshore Wind Turbines On Monopiles in Stratified SeabedShubhamNo ratings yet
- 4 Paper CfavfjsDocument12 pages4 Paper CfavfjsMarina Bellaver CorteNo ratings yet
- Isprs Archives XLII 2 W18 143 2019Document7 pagesIsprs Archives XLII 2 W18 143 2019Ashraf AlsalmaniNo ratings yet
- Wind-Turbine and Wind-Farm Flows: A Review: Fernando Porté-Agel Majid Bastankhah Sina ShamsoddinDocument59 pagesWind-Turbine and Wind-Farm Flows: A Review: Fernando Porté-Agel Majid Bastankhah Sina ShamsoddinScarlet YotsubaNo ratings yet
- MoonDocument21 pagesMoonTrương Công Hoàng SơnNo ratings yet
- 06! - Remotesensing 10 00668Document18 pages06! - Remotesensing 10 00668Rafa Otero EscuderoNo ratings yet
- Global CMT Project Provides Moment Tensors for 13,017 Earthquakes 2004-2010Document9 pagesGlobal CMT Project Provides Moment Tensors for 13,017 Earthquakes 2004-2010Andy HerlambangNo ratings yet
- Adverse Local Wind Effects On Neighbouring BuildingsDocument10 pagesAdverse Local Wind Effects On Neighbouring BuildingsOkke BronkhorstNo ratings yet
- International Journal of Multiphase FlowDocument6 pagesInternational Journal of Multiphase Flownwo13No ratings yet
- Journal of Fluids and Structures: J. García, J. Muñoz-Paniagua, A. Jiménez, E. Migoya, A. CrespoDocument18 pagesJournal of Fluids and Structures: J. García, J. Muñoz-Paniagua, A. Jiménez, E. Migoya, A. CrespoMohammed QasimNo ratings yet
- 2020 A wind load design method for ground-mounted multi-row solar arrays based on a compilation of wind tunnel experimentsDocument23 pages2020 A wind load design method for ground-mounted multi-row solar arrays based on a compilation of wind tunnel experimentsYanfei ZhuNo ratings yet
- Daldaban 2017Document27 pagesDaldaban 2017Motasem M DarwishNo ratings yet
- Wind Tunnel Measurements in Building Design: Micrometeorology, Aerodynamics, and ApplicationsDocument21 pagesWind Tunnel Measurements in Building Design: Micrometeorology, Aerodynamics, and ApplicationsJoseAngelFernandezOrtegaNo ratings yet
- Development of Co-Current Air-Water Flow in A Vertical PipeDocument4 pagesDevelopment of Co-Current Air-Water Flow in A Vertical PipeShobyNo ratings yet
- Aaqr 16 06 TN 0265Document13 pagesAaqr 16 06 TN 0265Trần Thị Kim TuyềnNo ratings yet
- Sakagami2014 WindshearassessmentusingwindLiDARprofilerDocument8 pagesSakagami2014 WindshearassessmentusingwindLiDARprofilervitor gNo ratings yet
- Modeling The Variation of Wind Speed With Height For AgriculturalDocument9 pagesModeling The Variation of Wind Speed With Height For Agriculturalshivnibus7669No ratings yet
- Aerosol Optical and Radiative Properties over Abu DhabiDocument24 pagesAerosol Optical and Radiative Properties over Abu DhabiNaseema BeegumNo ratings yet
- Aeroacoustic Optimization of Wind Turbine Airfoils by Combining Thermographic and Acoustic Measurement DataDocument4 pagesAeroacoustic Optimization of Wind Turbine Airfoils by Combining Thermographic and Acoustic Measurement DatamoussaouiNo ratings yet
- Proposal StanfordDocument4 pagesProposal Stanfordshn3No ratings yet
- J. J. Jin Et Al - Co-Located ACE-FTS and Odin/SMR Stratospheric-Mesospheric CO 2004 Measurements and Comparison With A GCMDocument4 pagesJ. J. Jin Et Al - Co-Located ACE-FTS and Odin/SMR Stratospheric-Mesospheric CO 2004 Measurements and Comparison With A GCMLupaessNo ratings yet
- Chapter Two: Aerosol Measurements: 1999 Mcmurry, 2000) - This Chapter Discusses Established As Well As Recent InstrumentsDocument26 pagesChapter Two: Aerosol Measurements: 1999 Mcmurry, 2000) - This Chapter Discusses Established As Well As Recent InstrumentsCheenuNo ratings yet
- 1 s2.0 S1352231098000764 MainDocument5 pages1 s2.0 S1352231098000764 MainMuhammed AmmachandyNo ratings yet
- Rlin Modeldescription 5-23-13Document18 pagesRlin Modeldescription 5-23-13Rahmi Putri DaulayNo ratings yet
- Lee2016 Article TimeOfEmergenceOfAnthropogenicDocument9 pagesLee2016 Article TimeOfEmergenceOfAnthropogenicgopikasuresNo ratings yet
- Early Online ReleaseDocument25 pagesEarly Online Releasebernardo figueroaNo ratings yet
- Analysis of Wind Data Gathered at ChajnantorDocument20 pagesAnalysis of Wind Data Gathered at ChajnantorDahamNo ratings yet
- Caulton-2018-acp-走航车不确定性高Document24 pagesCaulton-2018-acp-走航车不确定性高liuyayong01No ratings yet
- Atmospheric Environment: Parra M.A., Santiago J.L., Martín F., Martilli A., Santamaría J.MDocument9 pagesAtmospheric Environment: Parra M.A., Santiago J.L., Martín F., Martilli A., Santamaría J.MJanos KovacsNo ratings yet
- A Sensitivity Study of The WRF Model in Wind Simulation For An Area of High Wind EnergyDocument12 pagesA Sensitivity Study of The WRF Model in Wind Simulation For An Area of High Wind EnergyNgoc LeNo ratings yet
- Z AIAAJournal2007Document5 pagesZ AIAAJournal2007engma3No ratings yet
- The Guide To Wavelet AnalysisDocument18 pagesThe Guide To Wavelet AnalysisLiamNo ratings yet
- Application of CFD On The Sensitivity Analyses of Some Parameters of The Modified Hartmann TubeDocument12 pagesApplication of CFD On The Sensitivity Analyses of Some Parameters of The Modified Hartmann TubeAnas SafwanNo ratings yet
- Investigation of The Effects of Air On The Dynamic Behavior of A Small Cantilever BeamDocument18 pagesInvestigation of The Effects of Air On The Dynamic Behavior of A Small Cantilever BeamAkershitAgarwalNo ratings yet
- Design Wind Loads On Reinforced Concrete ChimneyDocument6 pagesDesign Wind Loads On Reinforced Concrete ChimneyeshanganjuNo ratings yet
- Fundamentals of Aeroacoustics with Applications to Aeropropulsion Systems: Elsevier and Shanghai Jiao Tong University Press Aerospace SeriesFrom EverandFundamentals of Aeroacoustics with Applications to Aeropropulsion Systems: Elsevier and Shanghai Jiao Tong University Press Aerospace SeriesNo ratings yet
- Weather Analysis and Forecasting: Applying Satellite Water Vapor Imagery and Potential Vorticity AnalysisFrom EverandWeather Analysis and Forecasting: Applying Satellite Water Vapor Imagery and Potential Vorticity AnalysisNo ratings yet
- Pavement Materials for Heat Island Mitigation: Design and Management StrategiesFrom EverandPavement Materials for Heat Island Mitigation: Design and Management StrategiesNo ratings yet
- Self-Operated Pressure Regulators ANSI Version: T 2513 EN Type 41-23 Universal Pressure Reducing ValveDocument6 pagesSelf-Operated Pressure Regulators ANSI Version: T 2513 EN Type 41-23 Universal Pressure Reducing ValveagrovadoNo ratings yet
- 15.production and Productivity Improvement Measures at MOIL-MOILDocument8 pages15.production and Productivity Improvement Measures at MOIL-MOILkatta_sridharNo ratings yet
- Climate Change and Conflict EssayDocument6 pagesClimate Change and Conflict EssayAgenyi AromeNo ratings yet
- Competitive Club Soccer: Parents' Assessments of Children's Early and Later Sport Specialization - PDocument12 pagesCompetitive Club Soccer: Parents' Assessments of Children's Early and Later Sport Specialization - PAodhan Jane MooneyNo ratings yet
- 10 Power Phrases To Master Your Next ArgumentDocument6 pages10 Power Phrases To Master Your Next ArgumentshaiannnicolebNo ratings yet
- 2018 January Proficiency Session 1 A VersionDocument11 pages2018 January Proficiency Session 1 A VersionUğur GiderNo ratings yet
- (Form GNQ 15B) FrickCompPrestartChecklistDocument2 pages(Form GNQ 15B) FrickCompPrestartChecklisteugene mejidanaNo ratings yet
- Effect of Temperatures On The Permeability of Beetroot Cell Membranes in LatviaDocument16 pagesEffect of Temperatures On The Permeability of Beetroot Cell Membranes in LatviaMariam Al.hellaniNo ratings yet
- COVERSHEET FOR SUBMISSION OF ASSIGNMENT - HOSPITALITY COMMUNICATION SKILLSDocument15 pagesCOVERSHEET FOR SUBMISSION OF ASSIGNMENT - HOSPITALITY COMMUNICATION SKILLSSaffu PatelNo ratings yet
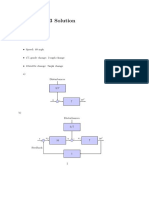
- Homework 3 Solution: Problem 1Document3 pagesHomework 3 Solution: Problem 1Gustavo Felicio PerruciNo ratings yet
- Non Industrial Applications of RobotsDocument3 pagesNon Industrial Applications of RobotsDhalal AsmiNo ratings yet
- Effects of Single ParentingDocument3 pagesEffects of Single Parentingmaria mariaNo ratings yet
- PestsDocument2 pagesPestsBlake MalveauxNo ratings yet
- Test of Infant Motor Performance (TIMP)Document6 pagesTest of Infant Motor Performance (TIMP)Juan Pablo NavarroNo ratings yet
- Office PoliticsDocument17 pagesOffice Politicsnasif al islamNo ratings yet
- Medical Assistant Essay ExamplesDocument2 pagesMedical Assistant Essay ExamplesbhhrxpaegNo ratings yet
- Elements of Arts Lesson PlanDocument9 pagesElements of Arts Lesson PlanMicahCastro100% (3)
- Russian Common AdjectivesDocument8 pagesRussian Common Adjectivesmoniquebateman20No ratings yet
- The Impact of Communication On OrganisatDocument12 pagesThe Impact of Communication On Organisatewrerwrew100% (1)
- Soil Stabilization Using Bottom Ash and Areca Fiber: Experimental Investigations and Reliability AnalysisDocument11 pagesSoil Stabilization Using Bottom Ash and Areca Fiber: Experimental Investigations and Reliability AnalysisHugo Dario Machaca CondoriNo ratings yet
- A Detailed Lesson Plan in EDUC 6ADocument10 pagesA Detailed Lesson Plan in EDUC 6ARyan Jay Gaviola CalahatNo ratings yet
- API 579 FFS in CodeCalc/PVEliteDocument4 pagesAPI 579 FFS in CodeCalc/PVEliteSajal Kulshrestha100% (1)
- Jadual Waktu SPM 2010Document2 pagesJadual Waktu SPM 2010sallehGNo ratings yet
- (MIÑOZA - Wen Roniel Badayos) - PKYF 2023 Application EssayDocument3 pages(MIÑOZA - Wen Roniel Badayos) - PKYF 2023 Application EssayWen MinozaNo ratings yet
- Difficulties Faced by Traffic Police in MultanDocument2 pagesDifficulties Faced by Traffic Police in MultanMALIK WALEED EJAZNo ratings yet
- Internal Assessment Resource Physics Level 2Document9 pagesInternal Assessment Resource Physics Level 2Alex RuckNo ratings yet
- Loraine Chemutai Koskei LAW/MG/1139/09/19 Enviromental and Natural Resource Law - Cat2 Hazardous WasteDocument4 pagesLoraine Chemutai Koskei LAW/MG/1139/09/19 Enviromental and Natural Resource Law - Cat2 Hazardous Wasteloraine koskeiNo ratings yet
- Unit 1: My Hobbies Lesson 1: Getting Started-My Favourite HobbyDocument15 pagesUnit 1: My Hobbies Lesson 1: Getting Started-My Favourite HobbyLinhtram LêNo ratings yet
- Agilent Cary 8454 UV-Visible Spectroscopy System: Installation GuideDocument104 pagesAgilent Cary 8454 UV-Visible Spectroscopy System: Installation Guidehugo martinezNo ratings yet