You might also like
- Simulation: Chapter - 13Document10 pagesSimulation: Chapter - 13JankiNo ratings yet
- Elevator SystemDocument6 pagesElevator SystemEdna Moreno100% (1)
- R - Modeling of Industrial Robot For Identification, Monitoring, and Control, Report No. 2439 PDFDocument8 pagesR - Modeling of Industrial Robot For Identification, Monitoring, and Control, Report No. 2439 PDFzhaodong.liangNo ratings yet
- 1 s2.0 S221282711830307X MainDocument6 pages1 s2.0 S221282711830307X Maintiva salvationNo ratings yet
- Machine Learning-Based Real-Time Sensor Drift Fault Detection Using Raspberry PiDocument7 pagesMachine Learning-Based Real-Time Sensor Drift Fault Detection Using Raspberry Pijymcrusher42No ratings yet
- 8 Mulvey2019Document26 pages8 Mulvey2019Nora Alaa El-dinNo ratings yet
- Imprtant Hof-Wil-04-hybridDiagnosisDocument14 pagesImprtant Hof-Wil-04-hybridDiagnosisboucharebNo ratings yet
- 2020 Data Driven Feature Extraction For Analog Circuit Fault Diagnosis Using 1D Convolutional Neural NetworkDocument11 pages2020 Data Driven Feature Extraction For Analog Circuit Fault Diagnosis Using 1D Convolutional Neural NetworkimadldnNo ratings yet
- Pag. 228 235 - A REVIEW OF FAULT DIAGNOSISIN MECHATRONICS SYSTEMSDocument8 pagesPag. 228 235 - A REVIEW OF FAULT DIAGNOSISIN MECHATRONICS SYSTEMSSelahadin Al AyubNo ratings yet
- Network and System Simulation Tools For Next Generation Networks: A Case StudyDocument21 pagesNetwork and System Simulation Tools For Next Generation Networks: A Case StudyMst. Najnin SultanaNo ratings yet
- Acpee48638 2020 9136533Document5 pagesAcpee48638 2020 9136533NareshNo ratings yet
- Artificial Neural Network-Based Fault DiagnosisDocument6 pagesArtificial Neural Network-Based Fault DiagnosisGzam RaïfaNo ratings yet
- Fault Detection PDFDocument2 pagesFault Detection PDFsandeep lalNo ratings yet
- Abraham 1986Document16 pagesAbraham 1986vndjndfvNo ratings yet
- Montecarlo SimulationDocument12 pagesMontecarlo SimulationHanny Khn007No ratings yet
- Enhanced Anomaly-Based Fault Detection System in EDocument19 pagesEnhanced Anomaly-Based Fault Detection System in Esarah alinaNo ratings yet
- Model-Based Prognostics of Gear Health Using Stochastic Non-Linear Dynamical ModelsDocument6 pagesModel-Based Prognostics of Gear Health Using Stochastic Non-Linear Dynamical Modelsejlebe mekaniNo ratings yet
- New Developments in Industrial MPC Identification Yucai ZhuDocument8 pagesNew Developments in Industrial MPC Identification Yucai ZhuAlongkorn JaranchonNo ratings yet
- Application of Probabilistic Modeling PDFDocument4 pagesApplication of Probabilistic Modeling PDFRonaldo MilfontNo ratings yet
- A Survey On Wireless Network SimulatorsDocument8 pagesA Survey On Wireless Network SimulatorsAK GamsNo ratings yet
- ID 429 Anodot Ultimate Guide To Building A Machine Learning Outlier Detection System Part IIDocument22 pagesID 429 Anodot Ultimate Guide To Building A Machine Learning Outlier Detection System Part IIClément MoutardNo ratings yet
- 5.1.1 Objective and Scope: Jyenis 2020Document8 pages5.1.1 Objective and Scope: Jyenis 2020Andam SaiNo ratings yet
- Shah 2011Document5 pagesShah 2011Chandru AizzuNo ratings yet
- Modeling and SimulationDocument12 pagesModeling and SimulationMortaza HassanNo ratings yet
- Contextualized Indicators For Online Failure Diagnosis in Cellular NetworksDocument19 pagesContextualized Indicators For Online Failure Diagnosis in Cellular NetworksPSNo ratings yet
- ACSE Volume7 Issue2 P1111547434Document66 pagesACSE Volume7 Issue2 P1111547434nobibi9956No ratings yet
- Fault Isolability Analysis Based On Steady State Fault SignaturesDocument6 pagesFault Isolability Analysis Based On Steady State Fault SignaturesJuan Manuel MauroNo ratings yet
- Unsupervised Electric Motor Fault DetectDocument11 pagesUnsupervised Electric Motor Fault DetectVictor SeguraNo ratings yet
- Annual Reviews in Control: Khaoula Tidriri, Nizar Chatti, Sylvain Verron, Teodor TiplicaDocument19 pagesAnnual Reviews in Control: Khaoula Tidriri, Nizar Chatti, Sylvain Verron, Teodor TiplicaHusnain AliNo ratings yet
- Analysis of Error-Based Machine Learning Algorithms in Network Anomaly Detection and CategorizationDocument13 pagesAnalysis of Error-Based Machine Learning Algorithms in Network Anomaly Detection and CategorizationConfidence UdeNo ratings yet
- Overcoming Computational Errors in Sensing Platforms Through Embedded Machine-Learning KernelsDocument12 pagesOvercoming Computational Errors in Sensing Platforms Through Embedded Machine-Learning KernelsctorreshhNo ratings yet
- Fault Diagnosis of Discrete Event Systems Using Hybrid Petri NetsDocument6 pagesFault Diagnosis of Discrete Event Systems Using Hybrid Petri NetsfatihaNo ratings yet
- 218024305-Sen 719Document18 pages218024305-Sen 719varaprasad333kvpNo ratings yet
- Energy Efficient Hybrid Intrusion Detection System For Wireless Sensor NetworksDocument5 pagesEnergy Efficient Hybrid Intrusion Detection System For Wireless Sensor Networksram_rattleNo ratings yet
- Fault Diagnosis Power System Considering Malfunction PR CB PDFDocument6 pagesFault Diagnosis Power System Considering Malfunction PR CB PDFbdsrlNo ratings yet
- Simulation and Queueing Theory: Topic 8Document23 pagesSimulation and Queueing Theory: Topic 8Eng. Abdalla sheik Aden RaageNo ratings yet
- A Survey of Fault Diagnosis and Fault-Tolerant Techniques-Part I: Fault Diagnosis With Model-Based and Signal-Based ApproachesDocument11 pagesA Survey of Fault Diagnosis and Fault-Tolerant Techniques-Part I: Fault Diagnosis With Model-Based and Signal-Based ApproachesBeto MayoNo ratings yet
- HindawiDocument11 pagesHindawiUma MaheshwarNo ratings yet
- Fault Detection and Isolation in Robotic Manipulator Via Hybrid Neural NetworksDocument12 pagesFault Detection and Isolation in Robotic Manipulator Via Hybrid Neural Networksnick4nameNo ratings yet
- Computer Simulation TechniquesDocument185 pagesComputer Simulation TechniquesNguyen Thi Hai VanNo ratings yet
- Calculatin UncertaintyDocument25 pagesCalculatin Uncertaintyapi-3701058No ratings yet
- Gao 2015Document11 pagesGao 2015Tavi GrigNo ratings yet
- Automatic Root Cause Analysis For LTE Networks Based On Unsupervised TechniquesDocument18 pagesAutomatic Root Cause Analysis For LTE Networks Based On Unsupervised TechniquesMoazzam TiwanaNo ratings yet
- System For Automated Diagnosis in Cellular Networks Based On Performance IndicatorsDocument11 pagesSystem For Automated Diagnosis in Cellular Networks Based On Performance Indicatorsshahnaz1981fatNo ratings yet
- A Dynamic Affinity Propagation Clustering Algorithm For Cell Outage Detection in Self-Healing NetworksDocument5 pagesA Dynamic Affinity Propagation Clustering Algorithm For Cell Outage Detection in Self-Healing NetworkshardwellarminNo ratings yet
- SBIR NIST94 FinalReportDocument86 pagesSBIR NIST94 FinalReportKHA120099 StudentNo ratings yet
- SimulationDocument72 pagesSimulationHager gobranNo ratings yet
- Model-Based Performance Anticipation in Multi-Tier Autonomic Systems: Methodology and ExperimentsDocument15 pagesModel-Based Performance Anticipation in Multi-Tier Autonomic Systems: Methodology and ExperimentsTehman NiaziNo ratings yet
- Simulation AssignmentDocument7 pagesSimulation AssignmentNotes btechNo ratings yet
- White Paper Introduction To Modeling and Simulation by Anu MariaDocument7 pagesWhite Paper Introduction To Modeling and Simulation by Anu Mariamuhammad shafae0% (1)
- ReportDocument54 pagesReportKesehoNo ratings yet
- Vibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDocument10 pagesVibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDrRajeev ChauhanNo ratings yet
- Chapter 1 Introduction To Computer SimulDocument14 pagesChapter 1 Introduction To Computer Simulijoollee biyyaaNo ratings yet
- مقدمة محاكاة الشبكاتDocument9 pagesمقدمة محاكاة الشبكاتSaif ShubbarNo ratings yet
- Automatic Root Cause Analysis For LTE Networks Based On Unsupervised TechniquesDocument18 pagesAutomatic Root Cause Analysis For LTE Networks Based On Unsupervised TechniquesPranaviAgarwalNo ratings yet
- Computer Performance EvaluationDocument6 pagesComputer Performance EvaluationSadiqNo ratings yet
- Real-Time Predictive Maintenance UsingDocument9 pagesReal-Time Predictive Maintenance UsingRadim SlovakNo ratings yet
- Advanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesFrom EverandAdvanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesNo ratings yet
- Practical Control of Electric Machines: Model-Based Design and SimulationFrom EverandPractical Control of Electric Machines: Model-Based Design and SimulationNo ratings yet
- Fuzzy Logic and Expert Systems ApplicationsFrom EverandFuzzy Logic and Expert Systems ApplicationsRating: 5 out of 5 stars5/5 (1)
- Front PpsDocument1 pageFront PpsMridul krishna bhardwajNo ratings yet
- NetworkDocument8 pagesNetworkMridul krishna bhardwajNo ratings yet
- Adobe Scan 20-Dec-2023Document1 pageAdobe Scan 20-Dec-2023Mridul krishna bhardwajNo ratings yet
- Previous Year Question PaperDocument5 pagesPrevious Year Question PaperMridul krishna bhardwajNo ratings yet
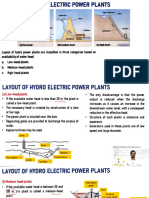
- Hydroelectric Power PlantDocument10 pagesHydroelectric Power PlantMridul krishna bhardwajNo ratings yet
- Mridul Krishna Bhardwaj Soft Skills 2 CTDocument3 pagesMridul Krishna Bhardwaj Soft Skills 2 CTMridul krishna bhardwajNo ratings yet
- Complexity PPSDocument3 pagesComplexity PPSMridul krishna bhardwajNo ratings yet
- MK Bhardwaj Prutor Quiz 3Document5 pagesMK Bhardwaj Prutor Quiz 3Mridul krishna bhardwajNo ratings yet
- M.K. Bhardwaj Prutor Quiz 5Document5 pagesM.K. Bhardwaj Prutor Quiz 5Mridul krishna bhardwajNo ratings yet
- M.K. Bhardwaj Quiz 4Document5 pagesM.K. Bhardwaj Quiz 4Mridul krishna bhardwajNo ratings yet
- M.K. Bhardwaj Quiz 5Document5 pagesM.K. Bhardwaj Quiz 5Mridul krishna bhardwajNo ratings yet
- Back Propagation in NNDocument30 pagesBack Propagation in NNShubhamNo ratings yet
- Software Testing Methodologies SyllabusDocument2 pagesSoftware Testing Methodologies SyllabusAshok ReddyNo ratings yet
- 6 Easy Steps To Learn Naive Bayes Algorithm With Codes in Python and RDocument6 pages6 Easy Steps To Learn Naive Bayes Algorithm With Codes in Python and RZahid DarNo ratings yet
- Data Asimilasi Untuk PemulaDocument24 pagesData Asimilasi Untuk PemulaSii Olog-olog PlonkNo ratings yet
- Unsupervised Anomaly Detection For X-Ray ImagesDocument22 pagesUnsupervised Anomaly Detection For X-Ray Imagespradip guptaNo ratings yet
- The Warsaw Econometric Challenge Second Edition: Prediction of An Upgrade of A Class in LOT FlightsDocument13 pagesThe Warsaw Econometric Challenge Second Edition: Prediction of An Upgrade of A Class in LOT FlightsRafał NojekNo ratings yet
- Comparative Study and Performance Analysis of Encryption in RSA, ECC and Goldwasser-Micali CryptosystemsDocument8 pagesComparative Study and Performance Analysis of Encryption in RSA, ECC and Goldwasser-Micali CryptosystemsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Quantitative Analysis - Chapter 4 - QMT437Document23 pagesQuantitative Analysis - Chapter 4 - QMT437AshNo ratings yet
- Uninformed/Blind Search: BBM 405 - Fundamentals of Artificial Intelligence Pinar Duygulu Hacettepe UniversityDocument13 pagesUninformed/Blind Search: BBM 405 - Fundamentals of Artificial Intelligence Pinar Duygulu Hacettepe UniversityIşıl KarabeyNo ratings yet
- Appedix D: Artificial Neural Network: D.1 Classical Hebb's RuleDocument4 pagesAppedix D: Artificial Neural Network: D.1 Classical Hebb's RuleVenkat RamanNo ratings yet
- Depth Anything: Unleashing The Power of Large-Scale Unlabeled DataDocument18 pagesDepth Anything: Unleashing The Power of Large-Scale Unlabeled Dataroyalatlas.stashNo ratings yet
- CSE330 Assignment1 SolutionDocument7 pagesCSE330 Assignment1 Solutionnehal hasnain refathNo ratings yet
- MARKET SegmentationDocument1 pageMARKET SegmentationAbyszNo ratings yet
- Reservoir Modelling and SimulationDocument2 pagesReservoir Modelling and SimulationDrRamesh RedrouthuNo ratings yet
- HW 3 Solution - CE 634 - Spring 2021Document6 pagesHW 3 Solution - CE 634 - Spring 2021oluwatobi ajayiNo ratings yet
- L-Lab Manual AbpDocument70 pagesL-Lab Manual AbpYogesh KarlekarNo ratings yet
- Objective: The Student Will Be Able ToDocument18 pagesObjective: The Student Will Be Able ToJojit LEDESMANo ratings yet
- The Method of Undetermined CoefficientsDocument4 pagesThe Method of Undetermined CoefficientsYousaf Anwar KhanNo ratings yet
- 4 ECE EC 2255 Control SystemDocument2 pages4 ECE EC 2255 Control SystemBIBIN CHIDAMBARANATHANNo ratings yet
- 30 Decidable and Undecidable-RevisedDocument8 pages30 Decidable and Undecidable-RevisedAnand BiradarNo ratings yet
- Experiment-4: Sabarivelan S 20BEI0059Document7 pagesExperiment-4: Sabarivelan S 20BEI0059sabarivelan sNo ratings yet
- Lab 2 Introduction To Labview and Usrp: Principle of Communication Lab ManualDocument7 pagesLab 2 Introduction To Labview and Usrp: Principle of Communication Lab Manualعمیر بن اصغرNo ratings yet
- Vulnerabilities of IEEE 802.11i Wireless LAN CCMP ProtocolDocument6 pagesVulnerabilities of IEEE 802.11i Wireless LAN CCMP ProtocolasNo ratings yet
- Examen Soa PDFDocument49 pagesExamen Soa PDFAnonymous Nu2bPH3No ratings yet
- Analysis of Direction of Arrival Estimation in Circular Arrays Using Music and Esprit AlgorithmsDocument30 pagesAnalysis of Direction of Arrival Estimation in Circular Arrays Using Music and Esprit Algorithmstteja28042002No ratings yet
- Auto ML Adnan MasoodDocument270 pagesAuto ML Adnan Masoodsayantan royNo ratings yet
- Midterm FinalDocument4 pagesMidterm FinalMikey MadRatNo ratings yet
- Ai Hon 4Document22 pagesAi Hon 4Gaurav SuryavanshiNo ratings yet
- Chapter 5 FinanceDocument9 pagesChapter 5 Financexuzhu5No ratings yet