Professional Documents
Culture Documents
Kouzer Kumar 2009 Vertical Uplift Capacity of Equally Spaced Horizontal Strip Anchors in Sand
Uploaded by
vgsuryawanshib20Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Kouzer Kumar 2009 Vertical Uplift Capacity of Equally Spaced Horizontal Strip Anchors in Sand
Uploaded by
vgsuryawanshib20Copyright:
Available Formats
Vertical Uplift Capacity of Equally Spaced Horizontal Strip
Anchors in Sand
K. M. Kouzer1 and Jyant Kumar2
Downloaded from ascelibrary.org by Veermata Jijabai Technological Institute (VJTI) on 01/02/24. Copyright ASCE. For personal use only; all rights reserved.
Abstract: The vertical uplift capacity of an infinite numbers of rigid strip plate anchors placed in a group and embedded in sand, has
been determined. An upper bound theorem of limit analysis in combination with finite elements and linear programming has been used to
perform the analysis. All the anchors are loaded to failure simultaneously with the same magnitudes of the failure loads. For different clear
spacing 共S兲 between the anchors, the magnitude of the efficiency factor 共␥兲 is determined; where ␥ is the ratio of the failure load for an
interfering strip anchor, for given width 共B兲 and depth 共d兲, to that of an isolated strip anchor having the same width and depth. The
magnitude of ␥ has been found to reduce substantially with a decrease in the spacing between the anchors. It was noted that a rigid soil
wedge just above the anchor plate and bounded by planar rupture surfaces separates out and it moves with the velocity same as that of the
anchor plate itself. The results available from the analysis were found to compare reasonably well with the available theoretical and
experimental data from the literature.
DOI: 10.1061/共ASCE兲1532-3641共2009兲9:5共230兲
CE Database subject headings: Anchors; Failures; Numerical models; Uplift; Sand; Limit analysis; Optimization.
Introduction a rigorous upper bound finite elements limit analysis for deter-
mining the vertical uplift capacity for a group of two strip anchors
A number of theories are available in literature from which the buried in sand; the results from this analysis were found to be
vertical uplift capacity of a single isolated horizontal strip anchor slightly better than those obtained on the basis of a simple rigid
can be determined 共Meyerhof and Adams 1968; Rowe and Davis wedge mechanism. It is understood from the existing theoretical
1982; Murray and Geddes 1987; Kumar 2001; Merifield and and experimental observations that 共1兲 the vertical uplift capacity
Sloan 2006; Kumar and Kouzer 2008a兲. However, in a number of of the anchors reduces quite significantly with a decrease in the
spacing between the anchors, 共2兲 the magnitude of failure loads
cases, anchors are placed in a group. Only limited information is
for a given spacing reduces continuously with an increase in the
available in literature to find the interference effect on the vertical
number of anchors in a group. In the present study, it is intended
ultimate uplift capacity of a group of several closely spaced hori-
to perform a rigorous computational analysis for finding the ver-
zontal anchors. By using the limit equilibrium approach, the ef-
tical uplift resistance of a strip anchor placed horizontally in a
fect of the interference on the uplift capacity of a group of several group of infinite number of anchors; the problem of an infinite
anchors was theoretically studied by Meyerhof and Adams 共1968兲 number of anchors was intentionally taken in this study as for this
by considering the vertical equilibrium of a rectangular soil case the magnitude of the failure load tends to becomes mini-
wedge, encompassing through the outer edges of the extreme an- mum. The analysis was carried by using an upper bound theorem
chors in the group. For a group of anchors, small scale model of limit analysis in combination with finite elements and linear
tests have been performed by Hanna et al. 共1972兲 on circular programming. The effect of the spacing between the anchors 共S兲
anchors and by Geddes and Murray 共1996兲 on square anchors. By was studied in detail for different embedment ratios of anchors.
using an upper bound limit analysis with the employment of a The nodal velocity patterns in different cases were also studied.
simple rigid block mechanism, Kumar and Kouzer 共2008b兲 have The results from the computational analysis were compared with
theoretically examined the effect of anchors’ spacing on the mag- the available theoretical and experimental results from the litera-
nitude of the vertical uplift resistance for a group of two and an ture.
infinite number of strip anchors placed horizontally in a cohesion-
less medium. Further with an intention of improving the earlier
obtained solution, Kouzer and Kumar 共2009兲 carried out recently Problem Definition
1
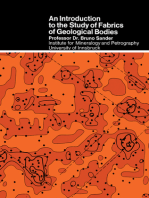
Lecturer, Dept. of Civil Engineering, Government Engineering Col- An infinite number of multiple strip anchor plates, having width
lege, Thrissur 680 009, Kerala, India. E-mail: kouzer@gmail.com B, are placed parallel to each other in a group with a clear dis-
2
Associate Professor, Dept. of Civil Engineering, Indian Institute of tance S as shown in Fig. 1共a兲. All the anchors are embedded in
Science, Bangalore 560012, India 共corresponding author兲. E-mail: sand at the same depth d from the ground surface; the embedment
jkumar@civil.iisc.ernet.in
ratio 共兲 of the anchor is defined equal to d / B. The thickness of
Note. This manuscript was submitted on July 16, 2008; approved on
March 24, 2009; published online on September 15, 2009. Discussion the anchor plate is assumed to be negligible; however, it is as-
period open until April 1, 2010; separate discussions must be submitted sumed to be perfectly rigid. The angle of interface friction be-
for individual papers. This paper is part of the International Journal of tween the anchor plate, both lower and upper surface, and the
Geomechanics, Vol. 9, No. 5, November 1, 2009. ©ASCE, ISSN 1532- adjoining soil mass was assumed to be equal to ; it is, neverthe-
3641/2009/5-230–236/$25.00. less, known that the roughness of the anchor plate does not affect
230 / INTERNATIONAL JOURNAL OF GEOMECHANICS © ASCE / OCTOBER 2009
Int. J. Geomech., 2009, 9(5): 230-236
Pu d Pu Pu
B S B S B
(B = Width of anchors)
(a)
Downloaded from ascelibrary.org by Veermata Jijabai Technological Institute (VJTI) on 01/02/24. Copyright ASCE. For personal use only; all rights reserved.
B S
2 2
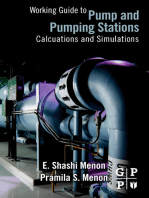
G Fig. 2. Different chosen meshes for = 40° with = 1
Y
u=0
d u=0 was assumed to be perfectly rigid and it was assumed to move in
v = Vo the vertical direction with a unit upward velocity 共u = 0 ; v = 1兲.
Rigid The soil mass within the chosen domain was discretized into
Anchor three-noded triangular elements by keeping velocity discontinui-
E F ties at all the interfaces between the elements. A velocity discon-
u = 0, δ = φ tinuity was also considered along the anchor-soil interface at the
h=B top and bottom surface of the anchor. Everywhere along the an-
y (v)
chor plate, there exists a minimum of three nodes having exactly
the same nodal coordinates, that is, one node along the anchor
x (u)
plate and remaining two nodes for the soil mass just above and
O X below the anchor plate, respectively. The finite-element mesh is
u=v=0
Plane of symmetry Plane of symmetry generated such that a greater concentration of the elements re-
mains in a region where higher velocity gradients 共around the
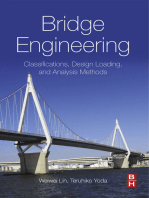
(b) edges of the anchor兲 are expected. Typical finite-element meshes
for = 40° and with three different embedment ratios 共兲, namely,
Fig. 1. 共a兲 Positioning and loading of the anchors; 共b兲 chosen domain
1, 3, and 5 for various spacings, are drawn in Figs. 2–4; where,
and boundary conditions
= d / B. These figures also provide the numbers of nodes, ele-
ments, and discontinuities for the chosen meshes. It can be no-
ticed from these figures that a greater number of elements as well
the vertical uplift resistance of horizontal anchors 共Rowe and as nodes were used for larger values of S / B and .
Davis 1982; Merifield and Sloan 2006; Kouzer and Kumar 2009兲.
At collapse, it is specified that all the anchors move in the vertical
upward direction with the same velocity V0 and are loaded to Analysis
failure simultaneously exactly at the same magnitude of the fail-
ure load. Under these conditions, it is to compute the ultimate Following Sloan and Kleeman 共1995兲, with the incorporation of
uplift load Pu per unit length of each anchor plate. the plastic strains both within elements and along all the velocity
discontinuities, an upper bound finite limit analysis was per-
formed. The yield criterion is expressed as a linear function of
Problem Domain and Finite-Element Mesh stresses in order that the finite-element formulation leads to a
linear programming problem. The Mohr-Coulomb failure crite-
It can be seen that 共1兲 the vertical plane OY, passing through the rion is assumed to be applicable. By using Bottero et al. 共1980兲,
center line of the anchor, and 共2兲 the vertical plane GX, passing the associated yield surface is approximated by an exterior regular
through the middle point between the two adjacent anchors, will polygon with p sides, circumscribing the actual failure surface, so
become the planes of symmetry. Accordingly, the rectangular do- that the solution remains always a rigorous upper bound on the
main OXGY as shown in Fig. 1共b兲, is chosen. The horizontal exact answer. The value of p is kept equal to 24 for performing all
boundary line 共OX兲 of this domain, however, needs to be located the computations. The rate of the total work done by the external
at some reasonable distance 共h兲 from the anchor plate such that loads is equated to the rate of dissipation of the total internal
the two basic requirements are always met with, that is, 共1兲 the energy dissipated within the elements 共due to body forces and
velocities of all the elements toward the horizontal boundary development of plastic strain兲 and along all the velocity disconti-
共OX兲 remain close to zero, and 共2兲 none of the yielded elements nuities 共Chen 1975兲. On this basis, the magnitude of the collapse
cross the line OX. Computations have shown that the value of h load 共Pu兲 is then expressed as a linear function of unknown nodal
equal to B was found to provide acceptable results. Following velocities and plastic multiplier rates. The upper bound problem
velocity boundary conditions were specified 共1兲 along OX, u = v can then be formulated as a linear programming problem in which
= 0, and 共2兲 along OY and GX 共the planes of symmetry兲, u = 0; the magnitude of Pu needs to be minimized subjected to a number
where, u and v are the two basic unknowns at a node, namely, of linear kinematic constraints.
horizontal and vertical velocities, respectively. The anchor plate All the steps for formulating the upper bound analysis as a
INTERNATIONAL JOURNAL OF GEOMECHANICS © ASCE / OCTOBER 2009 / 231
Int. J. Geomech., 2009, 9(5): 230-236
Downloaded from ascelibrary.org by Veermata Jijabai Technological Institute (VJTI) on 01/02/24. Copyright ASCE. For personal use only; all rights reserved.
Fig. 3. Different chosen meshes for = 40° with = 2
linear programming problem and the associated computational pu = ␥dF␥␥ 共1兲
procedure are described in Kumar and Kouzer 共2007兲. On lines
with Kumar and Kouzer 共2007兲, the linear optimization was car- where, F␥ = nondimensional uplift factor for a single isolated an-
ried out by using a linprog library program in MATLAB. chor due to the component of soil unit weight 共␥兲.
Definition of Efficiency Factor ␥ Results and Comparisons
The efficiency factor ␥ is the ratio of the magnitude of the col- The computational results were obtained by varying 共1兲 be-
lapse load for a strip anchor of a given width B and placed at tween 1 and 7, and 共2兲 the friction angle 共兲 of the soil mass
depth d in a group of infinite of anchors, to that of an isolated between 25 and 45 deg. The clear spacing 共S兲 between the an-
strip anchor with the same values of B and d. The magnitude of chors was increased from 0 to 2.4 times the depth of anchors. The
the average ultimate uplift pressure 共pu = Pu / B兲 for an intervening values of the uplift factor F␥ for isolated anchors were found to be
anchor is determined with the help of the following expression: exactly the same as those reported by Kumar and Kouzer
Fig. 4. Different chosen meshes for = 40° with = 5
232 / INTERNATIONAL JOURNAL OF GEOMECHANICS © ASCE / OCTOBER 2009
Int. J. Geomech., 2009, 9(5): 230-236
1.1 1.1
λ=1 λ=3
1
0.9
0.9
Efficiency factor, ξγ
Efficiency factor, ξγ
0.7
0.8 o
o φ = 25
φ = 25
30o
30o o
0.7 o 35
35 0.5
40o 40o
0.6 45o 45o
Downloaded from ascelibrary.org by Veermata Jijabai Technological Institute (VJTI) on 01/02/24. Copyright ASCE. For personal use only; all rights reserved.
0.3
Rigid wedge mechanism (Kumar and Kouzer, 2008b) Rigid wedge mechanism (Kumar and Kouzer, 2008b)
0.5
Present analysis (Upper bound with FEM) Present analysis (Upper bound with FEM)
0.4 0.1
0 0.4 0.8 1.2 1.6 2 2.4 0 1 2 3 4 5 6 7
S/B S/B
(a)
(a)
1.1 1.1
λ=2 λ=4
0.9
0.9
Efficiency factor, ξγ
Efficiency factor, ξγ
o
0.7
φ = 25 o
0.7 o φ = 25
30 o
30
35o
o 0.5 35o
40
40o
45o o
0.5 45
Rigid wedge mechanism (Kumar and Kouzer, 2008b) 0.3
Rigid wedge mechanism (Kumar and Kouzer, 2008b)
Present analysis (Upper bound with FEM)
Present analysis (Upper bound with FEM)
0.3 0.1
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 0 2 4 6 8
S/B S/B
(b) (b)
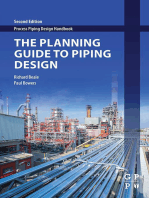
Fig. 5. Variation of efficiency factor 共␥兲 with S / B for: 共a兲 = 1; 共b兲 Fig. 6. Variation of efficiency factor 共␥兲 with S / B for: 共a兲 = 3; 共b兲
=2 =4
共2008b兲; the values of F␥ for an isolated anchor are, therefore, not
provided in this paper. The results related with the interference of vertical center line between the two adjacent anchors becomes
anchors are only presented herein. simply equal to zero; and the corresponding uplift resistance of all
the anchors simply becomes equal to that of an isolated one. For
interfering anchors, with S ⬍ 2d tan , all the nodes with nonzero
Efficiency Factor ␥ velocities were found to contain within a wedge lying above the
Figs. 5–8 provides the variation of ␥ with S / B and for = 1 to anchor plate. This soil wedge is seen to be intersected by linear
7. It can be noticed that on account of anchors’ interference, with rupture surfaces. The soil mass within this wedge was found to
a decrease in spacing between the anchors the magnitude of the remain nonplastic and moves upwards mainly in the vertical di-
efficiency factor reduces continuously. For the value of S equal to rection. The rupture surface, emerging from each edge of the
or greater than 2d tan , the magnitude of ␥ becomes almost anchor, approximately makes an angle with vertical; the rupture
equal to 1.0. This implies that for S ⱖ 2d tan , the uplift resis- surfaces join either the ground surface 共for S ⱖ 2d tan 兲 or the
tance of the anchors becomes equal to that of an isolated anchor. vertical central line between the anchors 共for S ⬍ 2d tan 兲 as
The magnitude of ␥ becomes minimum for S / B = 0. At S / B = 0, shown in Figs. 9–11. All the nodal velocities within rupture sur-
the value of ␥ becomes equal to 1 / 共1 + tan 兲. It can also be faces were found to have almost equal magnitudes and were gen-
noticed that the magnitude of ␥ for given values of S / B and erally seen to act in the vertical upward direction. The extent of
decreases continuously with an increase in . the rupture surface at the ground increases with an increase in the
values of both and . These observations associated with the
development of the collapse mechanism for the interfering an-
Nodal Velocity Patterns
chors almost support the choice of the simple rigid wedge mecha-
Nodal velocity patterns were drawn in various cases. Typical nism of Kumar and Kouzer 共2008b兲.
nodal velocity patterns, for = 40° and = 1, 3, and 5 with dif- It should be mentioned that the magnitude of ␥ for a given
ferent values of S / B, are illustrated in Figs. 9–11. It is observed S / B and decreases continuously with an increase in the value of
that when the clear spacing between the anchors is greater than the . This can be easily explained if a simple rigid wedge
2d tan , the velocities of all the elements in a region around the mechanism bounded by planar rupture surfaces is considered and
INTERNATIONAL JOURNAL OF GEOMECHANICS © ASCE / OCTOBER 2009 / 233
Int. J. Geomech., 2009, 9(5): 230-236
1.1 1.1
λ=5 λ=7
0.9 0.9
Efficiency factor, ξγ
Efficiency factor, ξγ
0.7 0.7
o
φ = 25 o
φ = 25
30o o
o
30
0.5 35 o
o 0.5 35
40
40o
45o
45o
Downloaded from ascelibrary.org by Veermata Jijabai Technological Institute (VJTI) on 01/02/24. Copyright ASCE. For personal use only; all rights reserved.
0.3 0.3
Rigid wedge mechanism (Kumar and Kouzer, 2008b) Rigid wedge mechanism (Kumar and Kouzer, 2008b)
Present analysis (Upper bound with FEM) Present analysis (Upper bound with FEM)
0.1 0.1
0 2 4 6 8 10 12 0 2 4 6 8 10 12 14 16
S/B S/B
(a)
Fig. 8. Variation of efficiency factor 共␥兲 with S / B and = 7
1.1
λ=6
0.9
strip anchors, and 共2兲 the experimental results of Hanna et al.
Efficiency factor, ξγ
共1972兲 for a group of 共a兲 five and seven circular anchors placed in
0.7
o
a single row and 共b兲 a group of 5 ⫻ 5 circular anchors. Hanna et
φ = 25
al. 共1972兲 have performed these small scale model tests on 38-
30o
0.5 35o
mm-diameter plate-shaped circular anchors embedded in sand
40
o with = 37°, ␥ = 14.88 kN/ m3, and = 6. The comparison of all
45o theses results is provided in Fig. 12共a兲. For the purpose of com-
0.3 parison, the values of ␥ from the present computational analysis
Rigid wedge mechanism (Kumar and Kouzer, 2000b)
as well those from the theory of Meyerhof and Adams 共1968兲
Present analysis (Upper bound with FEM)
were also obtained for = 6 with = 35°. It can be seen that the
0.1
0 2 4 6 8 10 12 14
present values of ␥ are slightly lower than the theoretical results
S/B of Meyerhof and Adams 共1968兲 and the experimental values of ␥
(b) of Hanna et al. 共1972兲 for 5 ⫻ 1 and 7 ⫻ 1 circular anchors. On the
other hand, the experimental values of ␥ from Hanna et al.
Fig. 7. Variation of efficiency factor 共␥兲 with S / B for: 共a兲 = 5; 共b兲 共1972兲 for 5 ⫻ 5 circular anchors were found to be even lower
=6 than the present analysis as well the theory of Meyerhof and
Adams 共1968兲. It should be mentioned that the case of the mul-
tiple strip anchors in a group will be equivalent to an “infinity
a closed form expression is developed for finding the ␥. For this number of square anchors with zero spacing placed in a single
purpose, the previous study of the writers 共Kumar and Kouzer row with an infinity number of such rows spaced with a given
2008b兲 can be referred. value of S / B.” It can be clearly noticed that for 5 ⫻ 5 circular
anchors, the value of the efficiency factor has become even
smaller than the results from the present theoretical analysis. Fur-
Comparison of the Present Results with the Available ther, the ␥ from the present analysis has been generated for a
Theoretical and Experimental Results from Literature little higher value of . Since the experimental values are for
The values of the efficiency factor ␥ obtained from the present
analysis were compared with those determined based on a rigid
wedge mechanism 共Kumar and Kouzer 2008b兲. The comparison
of all these results is provided in Figs. 5–8. It can be noticed that
the values of ␥ obtained from the present analysis generally pro-
vide marginally lower values 共better upper bound values兲 of ␥ as
compared to those obtained on the basis of a simply rigid wedge
mechanism for lower values 共 ⬍ 35°兲. However, for higher
values 共 ⱖ 35°兲, the values of ␥ obtained from the present
analysis match were found to be more or less the same as based
on a simple rigid wedge mechanism. Therefore, this comparison
reveals that the analysis based on a simple rigid wedge mecha-
nism provides quite acceptable answers for ⱖ 35°. However, for
lower values of , the rigorous computational analysis will pro-
vide a better upper bound solution of the problem.
The values of the efficiency factor obtained from the present
analysis were compared with the 共1兲 theoretical results of Meyer- Fig. 9. Variation of nodal velocity patterns with S / B for = 40° and
hof and Adams 共1968兲 for a group of several 共an infinite number兲 =1
234 / INTERNATIONAL JOURNAL OF GEOMECHANICS © ASCE / OCTOBER 2009
Int. J. Geomech., 2009, 9(5): 230-236
Downloaded from ascelibrary.org by Veermata Jijabai Technological Institute (VJTI) on 01/02/24. Copyright ASCE. For personal use only; all rights reserved.
Fig. 10. Variation of nodal velocity patterns with S / B for = 40° and = 3
higher values of , the difference between the two will decrease smaller when the experiments will be carried out for a greater
further as for a given S / B, the value of ␥ from the theory will number of anchors in the group and also it should be noted that
increase with a decrease in the value of . predicted value of ␥ from the theory for = 43.6° will become a
Fig. 12共b兲 illustrates a comparison of ␥ obtained from the little higher than that with = 45° and, therefore, this will reduce
present computational study for = 4 with the 共1兲 theory of Mey- the gap between the theoretical and experimental data. It is ex-
erhof and Adams 共1968兲 for an infinite number of multiple strip pected that a better comparison between the theory and experi-
anchors, and 共2兲 experimental results of Geddes and Murray mental data will result, provided that the experiments are
共1996兲 for a group of 共a兲 five square anchors in a row, and 共b兲 conducted on a group of strip anchors rather than employing ei-
2 ⫻ 2 square anchors. Geddes and Murray 共1996兲 have performed ther square or circular anchors.
experiments on 50.8-mm square anchors embedded in sand with
= 43.6° and ␥ = 16.5 kN/ m3 placed in a steel box of size
1.28 m ⫻ 1.22 m ⫻ 0.89 m with embedment ratio 共兲 equal to 4.
The results from both the theories were obtained for = 45°. It Conclusions
can be noticed that the present values of ␥ are found to be
slightly smaller than those given by the experimental data of Ged- By performing an upper bound limit analysis in combination with
des and Murray 共1996兲 and the theory of Meyerhof and Adams finite elements, the vertical uplift resistance is obtained for an
共1968兲. It can be noted the values of ␥ for 2 ⫻ 2 anchors are infinite number of equally spaced rough strip anchors placed in
found to be smaller than that of 5 ⫻ 1 anchors. In other words, the sand. It was noted that when the clear spacing 共S兲 between the
gap between the theory and the experimental results will become anchors is approximately greater than 2d tan , hardly any inter-
Fig. 11. Variation of nodal velocity patterns with S / B for = 40° and = 5
INTERNATIONAL JOURNAL OF GEOMECHANICS © ASCE / OCTOBER 2009 / 235
Int. J. Geomech., 2009, 9(5): 230-236
1.1 in . From the observed nodal velocity patterns, it was seen that
λ=6 in all the cases the soil mass lying above the anchor moves almost
0.9 as a single rigid unit with the velocity same as that of the anchor
itself. The numerical solution obtained in this paper provides a
Efficiency factor, ξγ
0.7 o
reasonable comparison with the available experimental and theo-
Exp. Data: φ = 37
Theories: φ = 35
o retical data from literature.
0.5 Hanna et al. (1972)- 5 x 1 circular anchors
Hanna et al. (1972)- 7 x 1 circular anchors
Hanne et al. (1972)- 5 x 5 circular anchors References
0.3 Meyerhof and Adams (1968) - strip anchors
Downloaded from ascelibrary.org by Veermata Jijabai Technological Institute (VJTI) on 01/02/24. Copyright ASCE. For personal use only; all rights reserved.
Present analysis - strip anchors
Bottero, A., Negre, R., Pastor, J., and Turgeman, S. 共1980兲. “Finite ele-
0.1 ment method and limit analysis theory for soil mechanics problem.”
0 2 4 6 8 10 Comput. Methods Appl. Mech. Eng., 22共1兲, 131–149.
S/B Chen, W. F. 共1975兲. Limit analysis and soil plasticity, Elsevier, Amster-
(a) dam, The Netherlands.
Geddes, J. D., and Murray, E. J. 共1996兲. “Plate anchor groups pulled
1.1 vertically in sand.” J. Geotech. Geoenviron. Eng., 122共7兲, 509–516.
Hanna, T. H., Sparks, R., and Yilmaz, M. 共1972兲. “Anchor behaviour in
0.9
sand.” J. Soil Mech. and Found. Div., 98共11兲, 1187–1207.
Kouzer, K. M., and Kumar, J. 共2009兲. “Vertical uplift capacity of two
Efficiency factor, ξγ
λ=4 interfering horizontal anchors in sand using an upper bound limit
0.7 analysis.” Comput. Geotech., 36共6兲, 1084–1089.
Theories: φ = 45
o
o
Kumar, J. 共2001兲. “Seismic vertical uplift capacity of strip anchors.” Geo-
Exp. Data: φ = 43.6
0.5 technique, 51共3兲, 275–279.
Kumar, J., and Kouzer, K. M. 共2007兲. “Effect of footing roughness on
Geddes and Murray (1996) - 5 x 1 square anchors bearing capacity factor N␥.” J. Geotech. Geoenviron. Eng., 133共5兲,
0.3 Geddes and Murray (1996)- 2 x 2 square anchors
Meyerhof and Adams (1968) - strip anchors
502–511.
Present analysis - strip anchors Kumar, J., and Kouzer, K. M. 共2008a兲. “Vertical uplift capacity of hori-
0.1 zontal anchors using upper bound limit analysis and finite elements.”
0 1 2 3 4 5 6 7 8 9 Can. Geotech. J., 45, 698–704.
S/B Kumar, J., and Kouzer, K. M. 共2008b兲. “Vertical uplift capacity of a
(b) group of shallow horizontal anchors in sand.” Geotechnique, 58共10兲,
821–824.
Fig. 12. Comparison of ␥ from the present analysis with the theory Merifield, R. S., and Sloan, S. W. 共2006兲. “The ultimate pullout capacity
of Meyerhof and Adams 共1968兲 and the experimental data of: 共a兲 of anchors in frictional soils.” Can. Geotech. J., 43共8兲, 852–868.
Meyerhof, G. G., and Adams, S. I. 共1968兲. “The ultimate uplift capacity
Hanna et al. 共1972兲; 共b兲 Geddes and Murray 共1996兲
of foundations.” Can. Geotech. J., 5共4兲, 225–244.
Murray, E. J., and Geddes, J. D. 共1987兲. “Uplift of anchor plates in sand.”
J. Geotech. Engrg., 113共3兲, 202–215.
ference between the adjoining anchors exists. On the other hand, Rowe, R. K., and Davis, E. H. 共1982兲. “The behaviour of anchor plates in
for S ⬍ 2d tan , the uplift resistance of anchors decreases sub- sand.” Geotechnique, 32共1兲, 25–41.
stantially with a decrease in the spacing between the anchors, and Sloan, S. W., and Kleeman, P. W. 共1995兲. “Upper bound limit analysis
the value of ␥ becomes minimum at S / B = 0. For given values of using discontinuous velocity fields.” Comput. Methods Appl. Mech.
S / B and , the magnitude of ␥ becomes smaller with an increase Eng., 127共4兲, 293–314.
236 / INTERNATIONAL JOURNAL OF GEOMECHANICS © ASCE / OCTOBER 2009
Int. J. Geomech., 2009, 9(5): 230-236
You might also like
- Kumar & SahooDocument5 pagesKumar & SahooMD Anan MorshedNo ratings yet
- By C. V. Girija Vallabhan, Member, ASCE, and Y. C. Das: J. Eng. Mech. 1988.114:2072-2082Document11 pagesBy C. V. Girija Vallabhan, Member, ASCE, and Y. C. Das: J. Eng. Mech. 1988.114:2072-2082nhan nguyenNo ratings yet
- Bearing Capacity of Interfering Strip FootingsDocument12 pagesBearing Capacity of Interfering Strip Footingsjuan carlos molano toroNo ratings yet
- Brandenberg, S. J. (2009) - Different Approaches For Estimating Ground Strains From Pile Driving Vibrations at A Buried Archeological SiteDocument12 pagesBrandenberg, S. J. (2009) - Different Approaches For Estimating Ground Strains From Pile Driving Vibrations at A Buried Archeological SiteMax ShashkinNo ratings yet
- Uplift Behavior of Screw Anchors in Sand. I. Dry SandDocument21 pagesUplift Behavior of Screw Anchors in Sand. I. Dry Sandahmed sallamNo ratings yet
- Int 2022 0048.1Document10 pagesInt 2022 0048.1Sepribo Eugene BriggsNo ratings yet
- Special Section: Seismic Inversion: Cyril D. Boateng, Li-Yun Fu, Wu Yu, and Guan XizhuDocument10 pagesSpecial Section: Seismic Inversion: Cyril D. Boateng, Li-Yun Fu, Wu Yu, and Guan Xizhusaurabh sharmaNo ratings yet
- P-Y Criterion For Rock Mass: Robert Liang, M.ASCE Ke Yang, M.ASCE and Jamal Nusairat, M.ASCEDocument11 pagesP-Y Criterion For Rock Mass: Robert Liang, M.ASCE Ke Yang, M.ASCE and Jamal Nusairat, M.ASCEAltan ErdemNo ratings yet
- Inelastic Deformation Ratios For Design and Evaluation of Structures: Single-Degree-of-Freedom Bilinear SystemsDocument11 pagesInelastic Deformation Ratios For Design and Evaluation of Structures: Single-Degree-of-Freedom Bilinear SystemsIPutu Ellsa SNo ratings yet
- Improved Seismic Performance of Gusset Plate ConnectionsDocument12 pagesImproved Seismic Performance of Gusset Plate ConnectionsPrateek PandaNo ratings yet
- Point Loads On Precast Concrete FloorsDocument19 pagesPoint Loads On Precast Concrete Floorskhemindra narainNo ratings yet
- 3 DexDocument6 pages3 DexmurilloborisNo ratings yet
- Liang Etal 2009 P-Y Criterion For Rock MassDocument11 pagesLiang Etal 2009 P-Y Criterion For Rock Massjoeymorse01No ratings yet
- Uk BL Ethos 371439Document402 pagesUk BL Ethos 371439cosminducaNo ratings yet
- Ambily and Gandhi 2007Document11 pagesAmbily and Gandhi 2007Manaswini VadlamaniNo ratings yet
- Behavior of Masonry-Infilled Nonductile Reinforced Concrete FramesDocument9 pagesBehavior of Masonry-Infilled Nonductile Reinforced Concrete FramesSuhail Ahmad AhangerNo ratings yet
- 2006 - Lie - Static StrenghtDocument10 pages2006 - Lie - Static StrenghtFelipe CoutinhoNo ratings yet
- Web Slenderness For Longitudinally Stiffened I-Girders Subjected To Patch LoadingDocument15 pagesWeb Slenderness For Longitudinally Stiffened I-Girders Subjected To Patch LoadingGogyNo ratings yet
- Raman WorkDocument20 pagesRaman WorkMuhammad AdnanNo ratings yet
- Ultimate Pullout Capacity of Vertical Anchors in Frictional SoilsDocument19 pagesUltimate Pullout Capacity of Vertical Anchors in Frictional SoilsMD Anan MorshedNo ratings yet
- Sediment Patterns From Fluid Bed Interactions A Direct Numerical Simulations Study On Fluvial Turbulent FlowsDocument4 pagesSediment Patterns From Fluid Bed Interactions A Direct Numerical Simulations Study On Fluvial Turbulent FlowsvarungunnalaNo ratings yet
- Slope Stabilizing Piles and Pile-GroupsParametric Study and Design InsightsDocument15 pagesSlope Stabilizing Piles and Pile-GroupsParametric Study and Design InsightsPANKAJ GUPTANo ratings yet
- Shear Strength of Reinforced ConcreteDocument19 pagesShear Strength of Reinforced ConcreteJoão Paulo MendesNo ratings yet
- International Journal of Geomechanics - Vol 16.iss 2.A24Document18 pagesInternational Journal of Geomechanics - Vol 16.iss 2.A24huutai355No ratings yet
- 28asce 290733 9429 282002 29128 3A12 281060 29Document9 pages28asce 290733 9429 282002 29128 3A12 281060 29Basem MohamedNo ratings yet
- Amplitude-Scaled Versus Spectrum-Matched Ground Motions For Seismic Performance AssessmentDocument11 pagesAmplitude-Scaled Versus Spectrum-Matched Ground Motions For Seismic Performance AssessmentKevin NathanielNo ratings yet
- Prediction of Bearing Capacity of Ring Foundation On Dense SandDocument12 pagesPrediction of Bearing Capacity of Ring Foundation On Dense SandArash NayeriNo ratings yet
- Winter 95Document60 pagesWinter 95Artur SascovNo ratings yet
- Oilfield Review 3Document14 pagesOilfield Review 3Luis Alberto Colan GarciaNo ratings yet
- Finite Element Studies of Asphalt Concrete Pavement Reinforced With GeogridDocument11 pagesFinite Element Studies of Asphalt Concrete Pavement Reinforced With GeogridKarim BenyoucefNo ratings yet
- Seismic Attributes For Fracture Analysis 1696898889Document16 pagesSeismic Attributes For Fracture Analysis 1696898889linocastilloNo ratings yet
- Bathnagar Et Al 2016Document13 pagesBathnagar Et Al 2016Marcelo CifuentesNo ratings yet
- Stability of Compacted Rockfill SlopesDocument10 pagesStability of Compacted Rockfill Slopesakhila s100% (1)
- Ching 2016Document51 pagesChing 2016thalesgmaiaNo ratings yet
- Numerical Investigation On The Effects of Deep Excavation On Adjacent Pile Groups Subjected To Inclined LoadingDocument6 pagesNumerical Investigation On The Effects of Deep Excavation On Adjacent Pile Groups Subjected To Inclined Loadingpawan yadavNo ratings yet
- Almusallam & Salloum - Seismic Response of Interior RC Beam-Column Joints Upgrade With FRP Sheets II-Analysis and Parametric StudyDocument11 pagesAlmusallam & Salloum - Seismic Response of Interior RC Beam-Column Joints Upgrade With FRP Sheets II-Analysis and Parametric StudyJuan Fernando Velásquez BedoyaNo ratings yet
- 2013 DoDocument11 pages2013 Dolyes geotNo ratings yet
- Stability of Beams With Tapered I-Sections: Journal of Engineering Mechanics September 1987Document22 pagesStability of Beams With Tapered I-Sections: Journal of Engineering Mechanics September 1987Johann BarcelosNo ratings yet
- Design of Diaphragm Wall Using Optimum Braced ExcavationDocument37 pagesDesign of Diaphragm Wall Using Optimum Braced ExcavationDebotosh Pramanick100% (1)
- Bearing Capacity for Spread Footings Placed Near c - ϕ SlopesDocument5 pagesBearing Capacity for Spread Footings Placed Near c - ϕ SlopesEmre AkınayNo ratings yet
- Anastasopoulos Etal 2007Document24 pagesAnastasopoulos Etal 2007Paloma CortizoNo ratings yet
- Análisis Tridimensional de La Capacidad de Carga de Cimientos Poco Profundos Utilizando El Método de Elementos DiscretosDocument11 pagesAnálisis Tridimensional de La Capacidad de Carga de Cimientos Poco Profundos Utilizando El Método de Elementos DiscretosAaron Arango AyalaNo ratings yet
- Lau1994 PDFDocument15 pagesLau1994 PDFRith MakaraNo ratings yet
- Improved Seismic Performance of Gusset Plate ConnectionsDocument12 pagesImproved Seismic Performance of Gusset Plate ConnectionsGokul PrabuNo ratings yet
- 1 24 2017 - AmplitudeDocument11 pages1 24 2017 - AmplitudeAndrew GarfieldNo ratings yet
- Probabilistic Bearing Capacity Prediction of SquareDocument17 pagesProbabilistic Bearing Capacity Prediction of SquareferraNo ratings yet
- Eichelberger 2015Document16 pagesEichelberger 2015OmatoukNo ratings yet
- Behavior and Strength of Slab-Edge Beam-Column Connections Under Shear Force and MomentDocument6 pagesBehavior and Strength of Slab-Edge Beam-Column Connections Under Shear Force and MomentMahmoudSofanNo ratings yet
- Wick Drain - Smear ZoneDocument5 pagesWick Drain - Smear ZonehamidkarimpourNo ratings yet
- (Asce) ST 1943-541X 0000007Document8 pages(Asce) ST 1943-541X 0000007kgapuNo ratings yet
- DampingshortperiodasceDocument13 pagesDampingshortperiodasceAbdullah tahaNo ratings yet
- Influence of Gusset Plate Stiffeners On The SeismicDocument6 pagesInfluence of Gusset Plate Stiffeners On The SeismicSang NguyenNo ratings yet
- Lei Et Al 2023 An Advanced Approach To Determining The Spanwise Coherence of The Buffeting Forces On Bridge Decks WithDocument10 pagesLei Et Al 2023 An Advanced Approach To Determining The Spanwise Coherence of The Buffeting Forces On Bridge Decks WithTONY VILCHEZ YARIHUAMANNo ratings yet
- Shear Behavior of Corrugated Web Bridge GirdersDocument9 pagesShear Behavior of Corrugated Web Bridge GirdersAraz ShabestariNo ratings yet
- Crosswell Seismic Profiling Principle To ApplicationsDocument3 pagesCrosswell Seismic Profiling Principle To ApplicationssenohiNo ratings yet
- (Asce) 1090-0241 (2003) 129 4Document11 pages(Asce) 1090-0241 (2003) 129 4Kang YaoNo ratings yet
- Probabilistic Assessment of Slope Stability That Considers The Spatial Variability of Soil PropertiesDocument10 pagesProbabilistic Assessment of Slope Stability That Considers The Spatial Variability of Soil Propertiesrafael souzaNo ratings yet
- An Aquifer Model For Fissured Reservoirs: Shell Development CO. Member SP E-Aime Houston, TexDocument14 pagesAn Aquifer Model For Fissured Reservoirs: Shell Development CO. Member SP E-Aime Houston, TexIgnacio PazNo ratings yet
- Ahmed and Rajaratnam1998Document13 pagesAhmed and Rajaratnam1998Ahmad HelmiNo ratings yet
- Sound Radiation MelnikovDocument12 pagesSound Radiation MelnikovPajserchinaNo ratings yet
- Modeling of A Mooring System Based On Flexible Multibody Dynamics Considering Contact With SeabedDocument2 pagesModeling of A Mooring System Based On Flexible Multibody Dynamics Considering Contact With SeabedSuraj BhatNo ratings yet
- CIVL4750 Lecture 8Document28 pagesCIVL4750 Lecture 8hktang1802No ratings yet
- Blue Edge: The Design, Development and Testing of A New Blade ConceptDocument14 pagesBlue Edge: The Design, Development and Testing of A New Blade ConceptKevinNo ratings yet
- A Study On Behavior of Block Pavement Using 3D Finite Element MethodDocument10 pagesA Study On Behavior of Block Pavement Using 3D Finite Element MethodOrlando RojasNo ratings yet
- FEM in Geotech EngineeringDocument21 pagesFEM in Geotech EngineeringPawan Kumar100% (1)
- Catia Generative Structural AnalysisDocument22 pagesCatia Generative Structural Analysismelvin ekboteNo ratings yet
- HW SimLab WebDocument2 pagesHW SimLab WebrmdsNo ratings yet
- Study On Behaviour of Stud Type Shear Connector in Composite Beam Using ANSYSDocument5 pagesStudy On Behaviour of Stud Type Shear Connector in Composite Beam Using ANSYSShubham BajpaiNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deDocument30 pagesMANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deIsrar UllahNo ratings yet
- FEA Mesh Convergence and Singularity in Connecting LugDocument11 pagesFEA Mesh Convergence and Singularity in Connecting LugDarshanPatel100% (1)
- Static Analysis of An Isotropic Rectangular Plate Using Finite Element Analysis (FEA)Document16 pagesStatic Analysis of An Isotropic Rectangular Plate Using Finite Element Analysis (FEA)kaviraj TukhooNo ratings yet
- Numerical Methodology of Mesh-Based Simulation TechniqueDocument5 pagesNumerical Methodology of Mesh-Based Simulation TechniqueInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Augarde Et Al 2021 - J - Numerical Modelling of Large Deformation Problems in Geotechnical Engineering - A State-Of-The-Art ReviewDocument18 pagesAugarde Et Al 2021 - J - Numerical Modelling of Large Deformation Problems in Geotechnical Engineering - A State-Of-The-Art Reviewsriram narendranNo ratings yet
- Boom Cord Length and Boom Section LengthDocument10 pagesBoom Cord Length and Boom Section LengthUkrit ChansodaNo ratings yet
- 1 s2.0 S1270963817307113 MainDocument11 pages1 s2.0 S1270963817307113 MainkishoreNo ratings yet
- Buckling Strength of Structural PlatesDocument50 pagesBuckling Strength of Structural PlatesLizardladNo ratings yet
- Response of CMT Welded Aluminum AA5086-H111 To AA6061-T6 Plate With AA4043 Filler For BallisticDocument7 pagesResponse of CMT Welded Aluminum AA5086-H111 To AA6061-T6 Plate With AA4043 Filler For BallisticAnurag yadavNo ratings yet
- A Multi-Solver Scheme Based On Combined Field Integral Equations For Electromagnetic Modeling of Highly Complex ObjectsDocument12 pagesA Multi-Solver Scheme Based On Combined Field Integral Equations For Electromagnetic Modeling of Highly Complex ObjectscristianNo ratings yet
- Structural Engineering: Jawaharlal Nehru Technological University Anantapur Anantapur-515002 (A.P) IndiaDocument50 pagesStructural Engineering: Jawaharlal Nehru Technological University Anantapur Anantapur-515002 (A.P) IndianagiA ahmed100% (1)
- FEM in PavementDocument6 pagesFEM in PavementwesleynjNo ratings yet
- (Eng) Advanced Concept Training - 2d Concrete Members en 1992 - 2017Document69 pages(Eng) Advanced Concept Training - 2d Concrete Members en 1992 - 2017Muscadin MakensonNo ratings yet
- Proceedings 63 00012 v4Document11 pagesProceedings 63 00012 v4roxasenableNo ratings yet
- Polyflow Extrusion WS01 AxisymmetricDocument34 pagesPolyflow Extrusion WS01 Axisymmetricwoongs73No ratings yet
- Me2353 Finite Element Analysis L T P CDocument2 pagesMe2353 Finite Element Analysis L T P Ckb210538No ratings yet
- Subsea Pipeline StabilityDocument9 pagesSubsea Pipeline StabilityJhy MhaNo ratings yet
- BOSCH Automotive Handbook - 2022Document2,040 pagesBOSCH Automotive Handbook - 2022Block Dinl91% (23)
- PST 506 Finite Element Method Question Bank Unit - 1 Introduction One-MarkDocument6 pagesPST 506 Finite Element Method Question Bank Unit - 1 Introduction One-MarkSai VigneshNo ratings yet
- COMSOL MultiphysicsDocument11 pagesCOMSOL MultiphysicsJagriti KalraNo ratings yet
- 32: FE Mesh Genera3on: APL705 Finite Element MethodDocument13 pages32: FE Mesh Genera3on: APL705 Finite Element MethodBendahara KibarNo ratings yet
- Pocket Guide to Flanges, Fittings, and Piping DataFrom EverandPocket Guide to Flanges, Fittings, and Piping DataRating: 3.5 out of 5 stars3.5/5 (22)
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (138)
- Advanced Modelling Techniques in Structural DesignFrom EverandAdvanced Modelling Techniques in Structural DesignRating: 5 out of 5 stars5/5 (3)
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresFrom EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresRating: 1 out of 5 stars1/5 (2)
- Structural Cross Sections: Analysis and DesignFrom EverandStructural Cross Sections: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (19)
- Marine Structural Design CalculationsFrom EverandMarine Structural Design CalculationsRating: 4.5 out of 5 stars4.5/5 (13)
- Working Guide to Pump and Pumping Stations: Calculations and SimulationsFrom EverandWorking Guide to Pump and Pumping Stations: Calculations and SimulationsRating: 5 out of 5 stars5/5 (3)
- Bridge Engineering: Classifications, Design Loading, and Analysis MethodsFrom EverandBridge Engineering: Classifications, Design Loading, and Analysis MethodsRating: 4 out of 5 stars4/5 (16)
- Net Zero Energy Buildings (NZEB): Concepts, Frameworks and Roadmap for Project Analysis and ImplementationFrom EverandNet Zero Energy Buildings (NZEB): Concepts, Frameworks and Roadmap for Project Analysis and ImplementationRating: 5 out of 5 stars5/5 (1)
- Non-destructive Testing and Evaluation of Civil Engineering StructuresFrom EverandNon-destructive Testing and Evaluation of Civil Engineering StructuresJean-Paul BalayssacNo ratings yet
- Pipeline Rules of Thumb Handbook: A Manual of Quick, Accurate Solutions to Everyday Pipeline Engineering ProblemsFrom EverandPipeline Rules of Thumb Handbook: A Manual of Quick, Accurate Solutions to Everyday Pipeline Engineering ProblemsNo ratings yet
- Earthquake-Resistant Structures: Design, Build, and RetrofitFrom EverandEarthquake-Resistant Structures: Design, Build, and RetrofitRating: 4.5 out of 5 stars4.5/5 (8)
- Piping Engineering Leadership for Process Plant ProjectsFrom EverandPiping Engineering Leadership for Process Plant ProjectsRating: 5 out of 5 stars5/5 (1)
- Onshore Structural Design Calculations: Power Plant and Energy Processing FacilitiesFrom EverandOnshore Structural Design Calculations: Power Plant and Energy Processing FacilitiesRating: 4.5 out of 5 stars4.5/5 (13)
- Pipeline Planning and Construction Field ManualFrom EverandPipeline Planning and Construction Field ManualRating: 5 out of 5 stars5/5 (3)
- Piezocone and Cone Penetration Test (CPTu and CPT) Applications in Foundation EngineeringFrom EverandPiezocone and Cone Penetration Test (CPTu and CPT) Applications in Foundation EngineeringNo ratings yet
- Green Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsFrom EverandGreen Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsNo ratings yet