You might also like
- Arduino Cheat Sheet v03cDocument1 pageArduino Cheat Sheet v03cRicardo J PantojaNo ratings yet
- G3412 Con 4.2 PDFDocument15 pagesG3412 Con 4.2 PDFJaime Rocha QuimbayaNo ratings yet
- WORKSHOP MANUAL SECTION ON CLUTCH FREE SYSTEMDocument149 pagesWORKSHOP MANUAL SECTION ON CLUTCH FREE SYSTEMRowan Cornelius100% (1)
- Study Arduino Interfacing With LCD 7-Seg Serial CommDocument11 pagesStudy Arduino Interfacing With LCD 7-Seg Serial CommDeepak KumbharNo ratings yet
- 200cory Board DescriptionDocument2 pages200cory Board DescriptionChang ChangNo ratings yet
- Manual ArduinoDocument15 pagesManual ArduinoBalachandraNo ratings yet
- PIR Motion Sensor AlarmDocument46 pagesPIR Motion Sensor AlarmSyad AlyNo ratings yet
- Lesson Plan Computer System ServicingDocument6 pagesLesson Plan Computer System ServicingVon More50% (2)
- Pid ArduinoDocument6 pagesPid ArduinoJohn MurrayNo ratings yet
- Source Code-234Document9 pagesSource Code-234Bryan Joshua SalvidarNo ratings yet
- Void SetupDocument29 pagesVoid SetupAlejandro RojasNo ratings yet
- Lab06 - Smart Home Automation Using SensorsDocument14 pagesLab06 - Smart Home Automation Using SensorsChâu Trần100% (1)
- 4-digit 7-segment display RTC clockDocument21 pages4-digit 7-segment display RTC clockfrasekh100% (1)
- Arduino Lap 1Document27 pagesArduino Lap 1AnnisaNo ratings yet
- Code Dieu KhienDocument8 pagesCode Dieu KhienHau VoNo ratings yet
- Simulacion Programacion CeladaDocument23 pagesSimulacion Programacion CeladaEdwin Alberto Poveda RomeroNo ratings yet
- Lab 13Document11 pagesLab 13ubaidNo ratings yet
- CódigotarefaDocument3 pagesCódigotarefaBruno AlvesNo ratings yet
- Control 1Document7 pagesControl 1jasmhmyd205No ratings yet
- Controlling 7-Segment Display with ArduinoDocument10 pagesControlling 7-Segment Display with ArduinoJORGE LUIS PENALOZA MOLINANo ratings yet
- Arduino LED and sensor exercisesDocument12 pagesArduino LED and sensor exercisesالميمات المتشددNo ratings yet
- Arduino Heat Transfer DocumentationDocument8 pagesArduino Heat Transfer DocumentationDragosNo ratings yet
- CodeDocument4 pagesCodea dNo ratings yet
- Sensor WarnaDocument3 pagesSensor WarnaabdurNo ratings yet
- 7 Segment DisplayDocument30 pages7 Segment DisplayEyedel MehNo ratings yet
- Computer For ABEDocument8 pagesComputer For ABELyka Mae MancolNo ratings yet
- IOT IntroductionDocument23 pagesIOT IntroductionMadhuNo ratings yet
- MECH Arduino PPT 10 04 22Document24 pagesMECH Arduino PPT 10 04 22mayankdgaurNo ratings yet
- Interface Digital and Analog I/O Devices (Arduino Interfacing)Document29 pagesInterface Digital and Analog I/O Devices (Arduino Interfacing)Raggy TannaNo ratings yet
- IoT All CodesDocument22 pagesIoT All Codespatas54810No ratings yet
- ARDUINO Tinkercad Practices - NoDocument116 pagesARDUINO Tinkercad Practices - NoDavidNo ratings yet
- Home Automation (1) (1) - MergedDocument5 pagesHome Automation (1) (1) - MergedJhanavi ReddyNo ratings yet
- Connect Three Leds With Arduino and Blink Them in A Sequence and RepeatDocument13 pagesConnect Three Leds With Arduino and Blink Them in A Sequence and RepeatPadya Akhil Sai Vamsi NayakNo ratings yet
- TCS230 TCS3200 Color SensorDocument6 pagesTCS230 TCS3200 Color Sensorscorcher bNo ratings yet
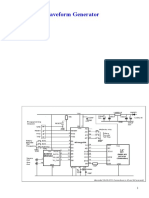
- AD9850 Waveform GeneratorDocument9 pagesAD9850 Waveform GeneratorDemixManNo ratings yet
- Arduino ExamplesDocument16 pagesArduino ExamplesKapila WijayaratneNo ratings yet
- KS0183 Keyestudio Multi-Purpose Shield V1Document10 pagesKS0183 Keyestudio Multi-Purpose Shield V1Xavier MuñozNo ratings yet
- Color Sorting MachineDocument2 pagesColor Sorting MachineFUTURE DUNIYANo ratings yet
- DmuXfU4SEeiBcwquuD4ZzA Quiz1 AssignmentDocument6 pagesDmuXfU4SEeiBcwquuD4ZzA Quiz1 AssignmentJoshikaNo ratings yet
- Color SensorDocument2 pagesColor SensorJayan SamaNo ratings yet
- Notes Arduino NanoDocument10 pagesNotes Arduino NanoManfredHNo ratings yet
- DISPLAYDocument18 pagesDISPLAYOMAR OLSIM MAMANI COSMENo ratings yet
- TP Limit SwitchDocument11 pagesTP Limit SwitchFilm DriveNo ratings yet
- ArcoirisDocument7 pagesArcoirisJACKELINE NOHEMY LOPEZ REYESNo ratings yet
- IOT Lab ExpDocument10 pagesIOT Lab Expsri kanthNo ratings yet
- Kelompok 5 Unit 7 MicroControllerDocument14 pagesKelompok 5 Unit 7 MicroControllerHilmi Pramono AdiNo ratings yet
- Color Sensor ProgramDocument4 pagesColor Sensor ProgramTALI MarouaNo ratings yet
- IoT all codesDocument22 pagesIoT all codespatas54810No ratings yet
- Interfacing Seven Segment Display With Arduino UNODocument5 pagesInterfacing Seven Segment Display With Arduino UNODEEPAK UPADHYAYNo ratings yet
- KS0184 Keyestudio Multi-Purpose Shield V2Document9 pagesKS0184 Keyestudio Multi-Purpose Shield V2Xavier MuñozNo ratings yet
- Monitor Oil Level Raspberry Pi PythonDocument28 pagesMonitor Oil Level Raspberry Pi PythonRangaraj A.GNo ratings yet
- Lab 2 - 7 Segment Display and Analog InputsDocument27 pagesLab 2 - 7 Segment Display and Analog Inputsroger david pimienta barrosNo ratings yet
- TSC 3200Document5 pagesTSC 3200Damir SpahićNo ratings yet
- Part-1 PIR Motion Sensor and Servo CodeDocument15 pagesPart-1 PIR Motion Sensor and Servo CodeM Salman RyanNo ratings yet
- isd_code4Document5 pagesisd_code4Khushi AgrawalNo ratings yet
- GSM Based Home AutomationDocument4 pagesGSM Based Home AutomationPoonthalirNo ratings yet
- CTS Application Notes 1.0Document14 pagesCTS Application Notes 1.0shubhamgarg2222No ratings yet
- Jobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDocument26 pagesJobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDwi SuciNo ratings yet
- LAB FAT QUESTIONS ANALYSISDocument15 pagesLAB FAT QUESTIONS ANALYSISSrinivasan UmaNo ratings yet
- New Microprocessor 1-RecDocument14 pagesNew Microprocessor 1-RecAgnus S Swarna LakshmiNo ratings yet
- ECGDocument8 pagesECGGuna lakshmiNo ratings yet
- C++ Ultrasonic Ping Sensor Distance CodeDocument3 pagesC++ Ultrasonic Ping Sensor Distance CodeGroove GamingNo ratings yet
- Lab 1 12Document47 pagesLab 1 12Divina BumagatNo ratings yet
- Design of Transmission Systems - Important QuestonsDocument5 pagesDesign of Transmission Systems - Important QuestonsPost BoxNo ratings yet
- IEV62 4096 V000 KABELSENDER: Incremental EncoderDocument3 pagesIEV62 4096 V000 KABELSENDER: Incremental Encoderjupiler100% (1)
- METHOD FOR GROUNDING RESISTANCE TESTDocument8 pagesMETHOD FOR GROUNDING RESISTANCE TESTHân TiênNo ratings yet
- Service Manual Fujitsu Nocria AWYZ 14-18-LBCDocument14 pagesService Manual Fujitsu Nocria AWYZ 14-18-LBCNo Surrender No RetreatNo ratings yet
- BQ (Mech) FF v1 WPKB BQDocument6 pagesBQ (Mech) FF v1 WPKB BQDanial HaziqNo ratings yet
- TargetDocument120 pagesTargetrohandiNo ratings yet
- GA 26-30 FS Service Diagram EN Pune 9097554751-01Document2 pagesGA 26-30 FS Service Diagram EN Pune 9097554751-01Mantenimiento Argen Peanuts SANo ratings yet
- Samsung Mono Controller Kit ManualDocument48 pagesSamsung Mono Controller Kit Manualllincee MNo ratings yet
- MT-501 Instalation ManualDocument5 pagesMT-501 Instalation ManualmymamymNo ratings yet
- SD-006 Capacitor Box - Deionizaiton Assy - SW UpdateDocument3 pagesSD-006 Capacitor Box - Deionizaiton Assy - SW UpdateErico RodrguesNo ratings yet
- Af551 PDFDocument250 pagesAf551 PDFElif FotokopiNo ratings yet
- A100K11750 CTB Technical ManualDocument82 pagesA100K11750 CTB Technical ManualMurat AltparmakNo ratings yet
- CL - Paint Spray Sys (Spray Gun) Article Number: 4260025 Ident Number: 21010Document2 pagesCL - Paint Spray Sys (Spray Gun) Article Number: 4260025 Ident Number: 21010BokiNo ratings yet
- 3TK28251BB40 DatashnDocument4 pages3TK28251BB40 DatashnVinicius MateusNo ratings yet
- D301061X012 - ROC-Floboss Accessories Manual PDFDocument107 pagesD301061X012 - ROC-Floboss Accessories Manual PDFj de santisNo ratings yet
- Emergency Air Compressor Type Wp-22l - 110413Document59 pagesEmergency Air Compressor Type Wp-22l - 110413Aswin MohanNo ratings yet
- IDEM Safety Switches RMR Datasheet TelesonDocument1 pageIDEM Safety Switches RMR Datasheet TelesonmukeshkanzariyaNo ratings yet
- Samyo MPR 714Document79 pagesSamyo MPR 714Anonymous D8ay3BMJ5No ratings yet
- Cartridge Solenoid Valve Type VR 032Document4 pagesCartridge Solenoid Valve Type VR 032ezeizabarrenaNo ratings yet
- 2023-09-01 Dlink Cat 6 CableDocument1 page2023-09-01 Dlink Cat 6 CableCpgeorge JohnNo ratings yet
- Installation Manual: Tcflow-CDocument9 pagesInstallation Manual: Tcflow-CSanoun KilanisNo ratings yet
- MERU 4.1 Pneumatic SystemsDocument36 pagesMERU 4.1 Pneumatic Systemskevin tirayaNo ratings yet
- EMKO ecoPID PID Temperature Controller Instruction ManualDocument2 pagesEMKO ecoPID PID Temperature Controller Instruction ManualWaldo herbas montaño100% (1)
- Elecs 2 q2 P Kwak PDFDocument3 pagesElecs 2 q2 P Kwak PDFJanne Clarize VillaricaNo ratings yet
- EIA/TIA 568A & 568B cable standards guideDocument2 pagesEIA/TIA 568A & 568B cable standards guideJavier Alonso SanzNo ratings yet
- Important Questions and Answers - Robot Drive Systems and End Effectors PDFDocument5 pagesImportant Questions and Answers - Robot Drive Systems and End Effectors PDFvicky tNo ratings yet