You might also like
- Feedforward ControlDocument7 pagesFeedforward Controlnilanjana89No ratings yet
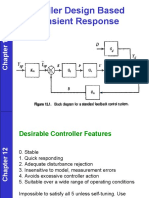
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response Criteriameseret sisayNo ratings yet
- 2010 Multiple-Input Modified Inverse Watkins-JohnsonDocument8 pages2010 Multiple-Input Modified Inverse Watkins-JohnsondruvsusheelNo ratings yet
- Exp 7 Report 1Document24 pagesExp 7 Report 1KA 19 128 Abdullah Ahmed Mohammed LahmdiNo ratings yet
- Control of Dispersed Generation To Regulate Distribution and Support Transmission VoltagesDocument6 pagesControl of Dispersed Generation To Regulate Distribution and Support Transmission VoltagesBogi AndikaNo ratings yet
- Quadratic - 09431104Document5 pagesQuadratic - 09431104Marcelo Flavio GuepfrihNo ratings yet
- Accounting of DC DC Power Converter Dynamics in DC Motor Velocity Adaptive ControlDocument7 pagesAccounting of DC DC Power Converter Dynamics in DC Motor Velocity Adaptive ControlFinito TheEndNo ratings yet
- 8 Model Verification: Model Overview in DeltavDocument3 pages8 Model Verification: Model Overview in DeltavGarabigNo ratings yet
- Lab 3 - Analyze Discrete PID ControllerDocument7 pagesLab 3 - Analyze Discrete PID ControllerDƯƠNG HUỲNH ĐÌNH CHIÊUNo ratings yet
- A 97.0% Maximum Efficiency, Fast Response, Low Voltage Ripple KY Boost Converter For Photovoltaic ApplicationDocument5 pagesA 97.0% Maximum Efficiency, Fast Response, Low Voltage Ripple KY Boost Converter For Photovoltaic ApplicationsathishNo ratings yet
- V Q V V V Q Q Q 1.05 pu Q (S ,P) Q: K Σ G (s,t) + - Σ + + 1 1Document5 pagesV Q V V V Q Q Q 1.05 pu Q (S ,P) Q: K Σ G (s,t) + - Σ + + 1 1Leonardo LeonNo ratings yet
- Bkf3791 Pci Lab - Group 2 - Experiment 7Document20 pagesBkf3791 Pci Lab - Group 2 - Experiment 7Lee Jian RongNo ratings yet
- Power System Operation and Control-3Document20 pagesPower System Operation and Control-3Nogdalla ShareefNo ratings yet
- AppendixA LaplaceDocument12 pagesAppendixA LaplaceSunny SunNo ratings yet
- A (S$QD' (S) )Document1 pageA (S$QD' (S) )Fadhil A. HasanNo ratings yet
- IDO 19300a PDFDocument189 pagesIDO 19300a PDFRugoNo ratings yet
- A Robustly Stable Output Feedback Saturated Controller For The BDocument6 pagesA Robustly Stable Output Feedback Saturated Controller For The BAMIR SOHAILNo ratings yet
- L16 CascadeDocument24 pagesL16 Cascadetaufiqurrahman mohd yunusNo ratings yet
- Ball and Beam WorkbookDocument31 pagesBall and Beam WorkbookCicero MelloNo ratings yet
- Ball and Beam Workbook PDFDocument31 pagesBall and Beam Workbook PDFluisNo ratings yet
- Determinación de Pérdidas en Circuitos RadialesDocument5 pagesDeterminación de Pérdidas en Circuitos RadialesEdna LópezNo ratings yet
- Experiment No: 6 Date: 24-09-2021: Aim: To Perform The Cascade Control Scheme. TheoryDocument7 pagesExperiment No: 6 Date: 24-09-2021: Aim: To Perform The Cascade Control Scheme. TheoryDrumil PatelNo ratings yet
- S ∆ X ∆u (k) ∆ X S ∆ u (k) b b b b b b b b b b b b b b ∆u ∆ u ∆ u Г Г Г Г Г ГDocument3 pagesS ∆ X ∆u (k) ∆ X S ∆ u (k) b b b b b b b b b b b b b b ∆u ∆ u ∆ u Г Г Г Г Г ГGarabigNo ratings yet
- Disturbance-Observer-Based Feedback Linearization Control For Stabilization and Accurate Voltage Tracking of A DCDC Boost ConverterDocument14 pagesDisturbance-Observer-Based Feedback Linearization Control For Stabilization and Accurate Voltage Tracking of A DCDC Boost Convertervenkatesh allamNo ratings yet
- A Mathematical Guideline For Designing An AC DC LLC Converter With PFCDocument8 pagesA Mathematical Guideline For Designing An AC DC LLC Converter With PFC조용규No ratings yet
- Estimating The Voltage Stability of A PoDocument1 pageEstimating The Voltage Stability of A Posiddam maheshNo ratings yet
- Kamesh-2-10Document9 pagesKamesh-2-10Angel Santiago Cabezas LópezNo ratings yet
- Made For Science Quanser Ball and Beam CoursewareStud MATLAB PDFDocument32 pagesMade For Science Quanser Ball and Beam CoursewareStud MATLAB PDFBui ThuyNo ratings yet
- 3.4.4 - Calculation of Lift Factor: Subscribe To Deepl Pro To Translate Larger Documents. Visit For More InformationDocument50 pages3.4.4 - Calculation of Lift Factor: Subscribe To Deepl Pro To Translate Larger Documents. Visit For More InformationSanjay SwamiNo ratings yet
- QUBE-Servo LQR Control Workbook (Instructor)Document10 pagesQUBE-Servo LQR Control Workbook (Instructor)Brayan MBNo ratings yet
- An Algorithm For The Output Waveform Compensation of SPWM Inverters Based On Fuzzy-Repetitive ControlDocument7 pagesAn Algorithm For The Output Waveform Compensation of SPWM Inverters Based On Fuzzy-Repetitive Controlsenthilkumar03No ratings yet
- Feedback Control PID Control: HadiyantoDocument64 pagesFeedback Control PID Control: HadiyantoNuzul RamadhaniNo ratings yet
- Wahab PTDU Lab 09Document3 pagesWahab PTDU Lab 09Ali ArshadNo ratings yet
- Full-Order Terminal Sliding Mode Control For Boost ConverterDocument5 pagesFull-Order Terminal Sliding Mode Control For Boost ConverterAbderrahman LahouaouiNo ratings yet
- 2.36 Tuning Level Control Loops: H. L. WadeDocument10 pages2.36 Tuning Level Control Loops: H. L. WadejigjigawNo ratings yet
- Chaper 7 Voltage Regulation: Presentation #2Document21 pagesChaper 7 Voltage Regulation: Presentation #2Sabri BouloumaNo ratings yet
- Experiment No. 02 Name of The Experiment: Modeling of Physical Systems and Study of Their Closed Loop Response ObjectiveDocument6 pagesExperiment No. 02 Name of The Experiment: Modeling of Physical Systems and Study of Their Closed Loop Response ObjectiveMd SayemNo ratings yet
- DAB DPS ZhaoB (一般般)Document5 pagesDAB DPS ZhaoB (一般般)anadiogdNo ratings yet
- Control of A DC Motor DriveDocument25 pagesControl of A DC Motor DrivePoliConDrive0% (1)
- 18EE71-Module-5-Part 2 Notes - 2022Document9 pages18EE71-Module-5-Part 2 Notes - 2022siddeshgssiddu345No ratings yet
- PTDU Lab No. 14 Study of Power Factor Correction On Hardware System Abdul Wahab Nasir (02) Bsee 16-20Document2 pagesPTDU Lab No. 14 Study of Power Factor Correction On Hardware System Abdul Wahab Nasir (02) Bsee 16-20Ali ArshadNo ratings yet
- 10 EMI 03 System ModellingDocument29 pages10 EMI 03 System Modellingch4nt333No ratings yet
- Montagner 2009Document4 pagesMontagner 2009Junaid AkhtarNo ratings yet
- First Review 1Document25 pagesFirst Review 1P LAKSHMI SRINIVASNo ratings yet
- PPTPRITYDocument27 pagesPPTPRITYPrity kumariNo ratings yet
- Modelling, Feedback Control Design and Simulation of An Industrial ApplicationDocument21 pagesModelling, Feedback Control Design and Simulation of An Industrial ApplicationjttatsumiNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response CriteriaDEVI RAJENDRANNo ratings yet
- Kollmorgen Cures For Mechanical Resonance 250712Document6 pagesKollmorgen Cures For Mechanical Resonance 250712zhaodong.liangNo ratings yet
- X AX B U FW y CX X Y, Y, Y,, Y: 6 Process Modeling EquationsDocument4 pagesX AX B U FW y CX X Y, Y, Y,, Y: 6 Process Modeling EquationsGarabigNo ratings yet
- EE254: D2 Buck ConverterDocument13 pagesEE254: D2 Buck ConverterNeil Hildick-SmithNo ratings yet
- Lab RobotikaDocument15 pagesLab RobotikaVivaldi KhathamiNo ratings yet
- Project: Cgk-064 Electrical Power Discrimination Study by Using Etap SoftwareDocument2,948 pagesProject: Cgk-064 Electrical Power Discrimination Study by Using Etap SoftwareDanang Tri PermadiNo ratings yet
- A Discrete Modeling For Power Factor Correction Circuit: Weiping Zhang, Fei Chen, Xusen Zhao, Yuanchao LiuDocument4 pagesA Discrete Modeling For Power Factor Correction Circuit: Weiping Zhang, Fei Chen, Xusen Zhao, Yuanchao LiuAnonymous zzfx7mz3No ratings yet
- Pid ControlDocument34 pagesPid Controlciocioi iancuNo ratings yet
- EEET 3046 Control Systems (2020) : Lecture 8: Controller Design by Heuristic TuningDocument14 pagesEEET 3046 Control Systems (2020) : Lecture 8: Controller Design by Heuristic Tuningbig NazNo ratings yet
- PID ControllerDocument22 pagesPID ControllerannonymousNo ratings yet
- O, XQS: (VoblDocument1 pageO, XQS: (VoblFadhil A. HasanNo ratings yet
- Unit 7 - Dynamic Behaviour of Feedback Control Systems 2022Document44 pagesUnit 7 - Dynamic Behaviour of Feedback Control Systems 2022rafitara78No ratings yet
- Hölder Continuous Euler Flows in Three Dimensions with Compact Support in Time: (AMS-196)From EverandHölder Continuous Euler Flows in Three Dimensions with Compact Support in Time: (AMS-196)No ratings yet
- Chap 13Document8 pagesChap 13megahedmNo ratings yet
- Chap 02Document9 pagesChap 02megahedmNo ratings yet
- Chap 01Document4 pagesChap 01megahedmNo ratings yet
- Control Valve Fast Ref For EngineerDocument35 pagesControl Valve Fast Ref For EngineerRaudhatul AzimaNo ratings yet
- Industry GeneralDocument24 pagesIndustry GeneralilieoniciucNo ratings yet
- Mufti ReligionMilitancy WebDocument0 pagesMufti ReligionMilitancy WebAyaz Ahmed KhanNo ratings yet
- Cultural AnthropologyDocument12 pagesCultural AnthropologyTRISH BOCANo ratings yet
- Market Structure and TrendDocument10 pagesMarket Structure and TrendbillNo ratings yet
- LhiannanDocument6 pagesLhiannanGreybornNo ratings yet
- Advantages of The CapmDocument3 pagesAdvantages of The Capmdeeparaghu6No ratings yet
- Chapter 8 - Current Electricity - Selina Solutions Concise Physics Class 10 ICSE - KnowledgeBoatDocument123 pagesChapter 8 - Current Electricity - Selina Solutions Concise Physics Class 10 ICSE - KnowledgeBoatskjNo ratings yet
- Finance 2021 23Document16 pagesFinance 2021 23GAURAV UPADHYAYNo ratings yet
- Nugent 2010 Chapter 3Document13 pagesNugent 2010 Chapter 3Ingrid BobosNo ratings yet
- Class 12 Unit-2 2022Document4 pagesClass 12 Unit-2 2022Shreya mauryaNo ratings yet
- Robert Egby - DecreesDocument9 pagesRobert Egby - DecreesmuzickaueNo ratings yet
- Buku BaruDocument51 pagesBuku BaruFirdaus HoNo ratings yet
- Enzymes WorksheetDocument5 pagesEnzymes WorksheetgyunimNo ratings yet
- Module 17 Building and Enhancing New Literacies Across The Curriculum BADARANDocument10 pagesModule 17 Building and Enhancing New Literacies Across The Curriculum BADARANLance AustriaNo ratings yet
- Evidence Based Practice in Nursing Healthcare A Guide To Best Practice 3rd Edition Ebook PDFDocument62 pagesEvidence Based Practice in Nursing Healthcare A Guide To Best Practice 3rd Edition Ebook PDFwilliam.tavares69198% (50)
- Protected PCM USB Memory Sticks For Pa3X.Document1 pageProtected PCM USB Memory Sticks For Pa3X.mariuspantera100% (2)
- Unit 2 Module 2 Combined-1Document14 pagesUnit 2 Module 2 Combined-1api-2930012170% (2)
- List of Practicals Class Xii 2022 23Document1 pageList of Practicals Class Xii 2022 23Night FuryNo ratings yet
- An Analysis of The Cloud Computing Security ProblemDocument6 pagesAn Analysis of The Cloud Computing Security Problemrmsaqib1No ratings yet
- YS1700 Drum Level ControlDocument2 pagesYS1700 Drum Level ControlIdriss BarçaNo ratings yet
- Discrete Random Variables: 4.1 Definition, Mean and VarianceDocument15 pagesDiscrete Random Variables: 4.1 Definition, Mean and VariancejordyswannNo ratings yet
- Vicente BSC2-4 WhoamiDocument3 pagesVicente BSC2-4 WhoamiVethinaVirayNo ratings yet
- CIVE2304 C1-1 Hydrological CycleDocument54 pagesCIVE2304 C1-1 Hydrological CyclenaserNo ratings yet
- Old Man and The SeaDocument10 pagesOld Man and The SeaXain RanaNo ratings yet
- Dehydration AssessmentDocument2 pagesDehydration AssessmentzaheerbdsNo ratings yet
- 2002 CT Saturation and Polarity TestDocument11 pages2002 CT Saturation and Polarity Testhashmishahbaz672100% (1)
- Flange CheckDocument6 pagesFlange CheckMohd. Fadhil JamirinNo ratings yet
- TM9-1904 - Ammunition Inspection Guide - 1944 PDFDocument414 pagesTM9-1904 - Ammunition Inspection Guide - 1944 PDFhodhodhodsribdNo ratings yet
- Simple Past and Past Perfect TensesDocument13 pagesSimple Past and Past Perfect TensesSincerly RevellameNo ratings yet
- D&D 3.5 Edition - Fiendish Codex I - Hordes of The Abyss PDFDocument191 pagesD&D 3.5 Edition - Fiendish Codex I - Hordes of The Abyss PDFIgnacio Peralta93% (15)