You might also like
- Marine Engineering Vol 2 Part 16-10pDocument10 pagesMarine Engineering Vol 2 Part 16-10pAlchemist_JVCNo ratings yet
- MANUAL DE SERVICIO LINDE E20 E25 E30 194579163-Linde-336-Gb-9512 PDFDocument168 pagesMANUAL DE SERVICIO LINDE E20 E25 E30 194579163-Linde-336-Gb-9512 PDFcolive167% (9)
- Linde E20 25 30 Forklift Trucks Service Manual PDFDocument62 pagesLinde E20 25 30 Forklift Trucks Service Manual PDFmike peters100% (3)
- Weaving MechanismDocument376 pagesWeaving Mechanismyousuftexduet100% (2)
- INS Manual of Standards (MOS) .PDDocument371 pagesINS Manual of Standards (MOS) .PDdwi setyo nugrahaNo ratings yet
- Workshop Manual Moped Model 210: I. Moped Specifications II. General Technical DataDocument27 pagesWorkshop Manual Moped Model 210: I. Moped Specifications II. General Technical DataWilmer GonzalezNo ratings yet
- Preview PDFDocument56 pagesPreview PDFDheeraj Thakur100% (1)
- HCH-MaintenanceManual2 4Document171 pagesHCH-MaintenanceManual2 4Jonathan Lara FandiñoNo ratings yet
- Vibratory Model 500 ManualDocument81 pagesVibratory Model 500 ManualMaldwin MenorcaNo ratings yet
- CraneDocument70 pagesCranetcbm652No ratings yet
- Linkage MechanismsDocument15 pagesLinkage MechanismsSahilye GehaNo ratings yet
- mainteESAO301 2 0Document191 pagesmainteESAO301 2 0Enrique PeraltaNo ratings yet
- Sime, Anthony P. (1998) Stress Analysis of Overlapped Crankshafts. PHD Thesis, University of NottinghamDocument281 pagesSime, Anthony P. (1998) Stress Analysis of Overlapped Crankshafts. PHD Thesis, University of Nottinghamimran5705074No ratings yet
- Hek GL Manual PDFDocument62 pagesHek GL Manual PDFTaras KutsykNo ratings yet
- Manual FinalDocument49 pagesManual FinalAmar PandeyNo ratings yet
- Fabrication Propeller Shaft Using in Two WheelerDocument4 pagesFabrication Propeller Shaft Using in Two WheelerSURESHNo ratings yet
- Projectreport 180130230756Document24 pagesProjectreport 180130230756ionut_bordeianu5534No ratings yet
- Quaternions and Rotation Sequences: A Primer with Applications to Orbits, Aerospace and Virtual RealityFrom EverandQuaternions and Rotation Sequences: A Primer with Applications to Orbits, Aerospace and Virtual RealityNo ratings yet
- Linde E18P-02Document306 pagesLinde E18P-02ludecar hyster100% (4)
- Part 1 J44 Operations Manual REV002Document95 pagesPart 1 J44 Operations Manual REV002Serg100% (2)
- ADA402977Document124 pagesADA402977Eyob AdNo ratings yet
- Optimization of Gas Lift Design Using Graphical and Softwar Methods For Entisar Field - Elbouzidi Et. AlDocument87 pagesOptimization of Gas Lift Design Using Graphical and Softwar Methods For Entisar Field - Elbouzidi Et. AlSuleiman BaruniNo ratings yet
- Hydromechanica 3Document324 pagesHydromechanica 3Enrique J. Carrillo GómezNo ratings yet
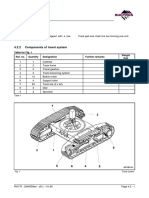
- 4.2 Travel System: 4.2.1 GeneralDocument6 pages4.2 Travel System: 4.2.1 GeneralJhonny ManjarrezNo ratings yet
- Cold Feeder 4Document1 pageCold Feeder 4Vijay BhureNo ratings yet
- Herve Baudu - Ship Handling Dokmar 2017 STA OCRDocument284 pagesHerve Baudu - Ship Handling Dokmar 2017 STA OCRCristian Andrei100% (3)
- Ada 090513Document443 pagesAda 090513PNo ratings yet
- CAT 6040 - Travel System Wear LimitsDocument6 pagesCAT 6040 - Travel System Wear LimitsgianmarcoNo ratings yet
- TESIS DISEO PUENTE GRUA 5 TN PDFDocument104 pagesTESIS DISEO PUENTE GRUA 5 TN PDFAndres RestrepoNo ratings yet
- Binder1 PDFDocument28 pagesBinder1 PDFAdnan KhaldunNo ratings yet
- II Mechanisms of Machinery Chapter 2 LinkagesDocument62 pagesII Mechanisms of Machinery Chapter 2 LinkagesgalataataaddesaaNo ratings yet
- Merivaara Futura Plus 8381 Junior Manual ServiceDocument40 pagesMerivaara Futura Plus 8381 Junior Manual ServiceDanniel SchaafNo ratings yet
- How To Build A Model Steamer (With Four Large Scale Designs) (-Vines J.) (Z-Library)Document66 pagesHow To Build A Model Steamer (With Four Large Scale Designs) (-Vines J.) (Z-Library)akshatmondal2009No ratings yet
- Ashok G. Ambekar - Mechanism and Machine Theory-Prentice-Hall of India PVT - LTD (2007)Document1,008 pagesAshok G. Ambekar - Mechanism and Machine Theory-Prentice-Hall of India PVT - LTD (2007)cerden1998No ratings yet
- 336 03 GB 0611Document266 pages336 03 GB 0611Tahar BenacherineNo ratings yet
- Instruction of GeneratorDocument239 pagesInstruction of GeneratorFerinoviardiNo ratings yet
- Overhaul Manual - Geared & Geared Supercharged EnginesDocument267 pagesOverhaul Manual - Geared & Geared Supercharged EnginesGabriel vieiraNo ratings yet
- US 518 Centrifuge Manual PDFDocument109 pagesUS 518 Centrifuge Manual PDFAnupam ThakuriaNo ratings yet
- H2000 5 10t Service and Operation Manual PDFDocument111 pagesH2000 5 10t Service and Operation Manual PDFJavier Ignacio Briones CapiccelliNo ratings yet
- A Guide To Ship Repair Estimates in Man-Hours-2nd Edition-2012 PDFDocument125 pagesA Guide To Ship Repair Estimates in Man-Hours-2nd Edition-2012 PDFJuan Camaney XngonNo ratings yet
- Submitted byDocument40 pagesSubmitted byTushar Nirwan 65No ratings yet
- Vertical Axis Wind Turbine For Remote Power GenerationDocument75 pagesVertical Axis Wind Turbine For Remote Power GenerationGeet DeokateNo ratings yet
- ZF TraducirDocument25 pagesZF TraducirJose Rafael Ramos ChiquilloNo ratings yet
- Vortex Element Methods For Fluid Dynamic Analysis of Engineering SystemsDocument588 pagesVortex Element Methods For Fluid Dynamic Analysis of Engineering Systemsfarouks meguellNo ratings yet
- Ember Aviation LAT-1: Presents TheDocument94 pagesEmber Aviation LAT-1: Presents Thegshock65No ratings yet
- PV-25 EwsDocument1 pagePV-25 EwsnareshNo ratings yet
- Heli H2000 TroubleshootingDocument20 pagesHeli H2000 TroubleshootingDiem NguyenducNo ratings yet
- AD881357 - Wheeled AmbhibiousDocument434 pagesAD881357 - Wheeled AmbhibiousVigneshVickeyNo ratings yet
- TTW BookDocument401 pagesTTW Bookhimank bhardwaj50% (2)
- Crane SWF 5 Ton Manual Book PDFDocument28 pagesCrane SWF 5 Ton Manual Book PDFAnggit0% (1)
- Reduction Gearbox Manual & Spare Parts ListDocument50 pagesReduction Gearbox Manual & Spare Parts ListPhan Cao An TruongNo ratings yet
- Heli H2000 5-10 T Forklift Truck Service Manual PDFDocument111 pagesHeli H2000 5-10 T Forklift Truck Service Manual PDFTheN DotaNo ratings yet
- Figure 5-1 Hydraulic Set Permanent Packer Figure 5-2 Mechanical Set Permanent PackerDocument11 pagesFigure 5-1 Hydraulic Set Permanent Packer Figure 5-2 Mechanical Set Permanent PackerShakeel AhmedNo ratings yet
- Diseno Puente GruaDocument110 pagesDiseno Puente Gruapapagene1954No ratings yet
- Elements of Airplane Performance (G.J.J. Ruijgrok) (Z-Library)Document460 pagesElements of Airplane Performance (G.J.J. Ruijgrok) (Z-Library)Hanna RybchynskaNo ratings yet
- Service Manual-Electric ForkliftDocument82 pagesService Manual-Electric ForkliftBladimir SolizNo ratings yet
- Yanmar4JHE ManualDocument316 pagesYanmar4JHE Manualgo1No ratings yet
- HC110Document13 pagesHC110rustamriyadiNo ratings yet
- Computer Knowledge - Basic General Computer AwarenessDocument8 pagesComputer Knowledge - Basic General Computer AwarenessDevika SNo ratings yet
- Fab A: Cpu: System Chipset: Main Memory: On Board DeviceDocument46 pagesFab A: Cpu: System Chipset: Main Memory: On Board DeviceEduinMaracuchoFernandezChaparroNo ratings yet
- MCCB Chint FotovoltaicaDocument11 pagesMCCB Chint FotovoltaicaLuis RolaNo ratings yet
- Encore Touch Service Manual ENDocument116 pagesEncore Touch Service Manual ENflalmeidaNo ratings yet
- For Information Only, Will Not Be Exchanged When Altered!: Spare Part ListDocument6 pagesFor Information Only, Will Not Be Exchanged When Altered!: Spare Part ListPedro SuyenNo ratings yet
- Evoque 2011-13 - Fuel Charging and Controls - Turbocharger - TD4 2.2L DieselDocument16 pagesEvoque 2011-13 - Fuel Charging and Controls - Turbocharger - TD4 2.2L DieselAliNo ratings yet
- Pilz Pnoz - User ManualDocument26 pagesPilz Pnoz - User ManualWellington MatosNo ratings yet
- Dodge Jeep and Chrysler Obd1 Codes ListDocument4 pagesDodge Jeep and Chrysler Obd1 Codes ListalbertdNo ratings yet
- Lely Welger AP 530 Manual deDocument94 pagesLely Welger AP 530 Manual deJimmy ZettenbergNo ratings yet
- Scross Service Bill at 67K+Document2 pagesScross Service Bill at 67K+Anil GuptaNo ratings yet
- Pic32 Maxi WebDocument21 pagesPic32 Maxi Webmaroua_ngoura100% (1)
- Crosman Mark I and 2 Factory Service Manual Year 1966Document10 pagesCrosman Mark I and 2 Factory Service Manual Year 1966Just4Him100% (2)
- P9 - Simple I-O InterfacingDocument34 pagesP9 - Simple I-O Interfacinganand_duraiswamy100% (1)
- 1VAG271201-DB ICX RevM May2013Document8 pages1VAG271201-DB ICX RevM May2013Anibal Richard Mamani ZapanaNo ratings yet
- How To Make Thermoelectric Generator at Home PlansDocument4 pagesHow To Make Thermoelectric Generator at Home PlansMiguel Angel BoldúNo ratings yet
- SG Eq4Document1 pageSG Eq4tungdohmeNo ratings yet
- 11.electric Motor DetailDocument3 pages11.electric Motor Detailrp63337651No ratings yet
- Swing Motor PW200 220-7Document7 pagesSwing Motor PW200 220-7Teknik Makina100% (1)
- K 6861642Document54 pagesK 6861642Jose Saucedo OlanNo ratings yet
- Electronics - Q3 - Week4-5 - Inductors - Answer SheetDocument2 pagesElectronics - Q3 - Week4-5 - Inductors - Answer SheetMelissa Gagujas0% (1)
- Data Sheet - 317 Stereo Integrated Amplifier PDFDocument2 pagesData Sheet - 317 Stereo Integrated Amplifier PDFIvan MojsaNo ratings yet
- MD 810 ManualDocument155 pagesMD 810 Manualneubin.poojapowerNo ratings yet
- GTP CVTDocument2 pagesGTP CVTARUN RAWATNo ratings yet
- 1 MBB Manual de Codigo de Falha PDFDocument37 pages1 MBB Manual de Codigo de Falha PDFmarkson santosNo ratings yet
- Qty. Description JPD 5-61 PT-V A-A-Cvbp: Company Name: Created By: Phone: DateDocument3 pagesQty. Description JPD 5-61 PT-V A-A-Cvbp: Company Name: Created By: Phone: Dateroronoa_zorro11No ratings yet
- Arduino UNO Tc4-ControllerDocument1 pageArduino UNO Tc4-ControllerJuan CastroNo ratings yet
- Parts CatalogDocument122 pagesParts CatalogBernardo100% (1)
- Mako 56Document80 pagesMako 56Eduardo PereiraNo ratings yet
- 22A Manual TransaxleDocument14 pages22A Manual TransaxleRolly CebanesNo ratings yet