You might also like
- A Computational Study of The Aerodynamic Forces and Power Requirements of Dragonfly (Aeschna Juncea) HoveringDocument15 pagesA Computational Study of The Aerodynamic Forces and Power Requirements of Dragonfly (Aeschna Juncea) HoveringThermic_TrioNo ratings yet
- JFM93 47-63 Maxworthy WeisfoghDocument24 pagesJFM93 47-63 Maxworthy WeisfoghHua Hidari YangNo ratings yet
- 1999 Science - Dickinson Et Al - Wing Rotation and The Aerodynamic Basis of Insect FlightDocument8 pages1999 Science - Dickinson Et Al - Wing Rotation and The Aerodynamic Basis of Insect Flightagro nomNo ratings yet
- Three Dimensional Flow Structures and Evolution of The Leading Edge Vortices On A Flapping WingDocument10 pagesThree Dimensional Flow Structures and Evolution of The Leading Edge Vortices On A Flapping WingAlfredo Chavez LunaNo ratings yet
- J Exp Biol 2001 SaneDocument21 pagesJ Exp Biol 2001 SaneAntonio Martín AlcántaraNo ratings yet
- 2004 - Aeroelastic Response of An Airfoil-Flap System Exposed To Time-Dependent DisturbancesDocument13 pages2004 - Aeroelastic Response of An Airfoil-Flap System Exposed To Time-Dependent DisturbancesFedericoBettiNo ratings yet
- The Control of Flight Force by A Flapping Wing: Lift and Drag ProductionDocument21 pagesThe Control of Flight Force by A Flapping Wing: Lift and Drag ProductionRAJARATNANo ratings yet
- Three-Dimensional Flow Visualization and Vorticity Dynamics in Revolving WingsDocument12 pagesThree-Dimensional Flow Visualization and Vorticity Dynamics in Revolving WingsRAJARATNANo ratings yet
- AeromechanicsofPassiveRotationinFlappingFlight WoodDocument24 pagesAeromechanicsofPassiveRotationinFlappingFlight WoodAsnide ArmadaNo ratings yet
- A Review On Studies of The Aerodynamics of Different Types of Maneuvers Inn DragonfliesDocument34 pagesA Review On Studies of The Aerodynamics of Different Types of Maneuvers Inn DragonfliesDR. RockyNo ratings yet
- Characteristics of Flow Past A Symmetric Airfoil at Low ReynoldsDocument9 pagesCharacteristics of Flow Past A Symmetric Airfoil at Low Reynoldszhaojie qinNo ratings yet
- 14229-Article Text-68914-1-10-20140622 PDFDocument10 pages14229-Article Text-68914-1-10-20140622 PDFM.A. NANTHAKUMARNo ratings yet
- Numerical Simulation of Flow-Driven Flapping-Wing Turbines For Wind and Water Power GenerationDocument4 pagesNumerical Simulation of Flow-Driven Flapping-Wing Turbines For Wind and Water Power GenerationLight HouseNo ratings yet
- Four-Bar Linkage Mechanism For Insectlike Flapping Wings in Hover: Concept and An Outline of Its RealizationDocument8 pagesFour-Bar Linkage Mechanism For Insectlike Flapping Wings in Hover: Concept and An Outline of Its RealizationHosein PahlavanNo ratings yet
- Stability Analysis of Hovering Flapping MAVsDocument20 pagesStability Analysis of Hovering Flapping MAVsAhmed ElsadekNo ratings yet
- Propeller in Vortex RingDocument16 pagesPropeller in Vortex Ringmondy.egNo ratings yet
- Cheng 2021Document13 pagesCheng 2021Karen GarzónNo ratings yet
- Role of Dipole Jet in Inclined Stroke Plane Kinematics of Insect FlightDocument13 pagesRole of Dipole Jet in Inclined Stroke Plane Kinematics of Insect FlightnextscholappNo ratings yet
- An Investigation Into The Effects of Unsteady Parameters On The Aerodynamics of A Low Reynolds Number Pitching AirfoilDocument15 pagesAn Investigation Into The Effects of Unsteady Parameters On The Aerodynamics of A Low Reynolds Number Pitching AirfoilMANNE SAHITHINo ratings yet
- Dickinson KinematicsDocument21 pagesDickinson Kinematicsm22me052No ratings yet
- Unsteady Aerodynamic Performance of Model Wings at Low Reynolds NumbersDocument21 pagesUnsteady Aerodynamic Performance of Model Wings at Low Reynolds Numberssamik4uNo ratings yet
- Longitudinal Flight Dynamic Analysis On Vertical Takeoff of A Tailless Flapping-Wing Micro Air VehicleDocument15 pagesLongitudinal Flight Dynamic Analysis On Vertical Takeoff of A Tailless Flapping-Wing Micro Air Vehiclechandra sekharNo ratings yet
- Accepted ManuscriptDocument14 pagesAccepted ManuscriptStiven CastellanosNo ratings yet
- The Aerodynamics of Hummingbird Flight: January 2007Document6 pagesThe Aerodynamics of Hummingbird Flight: January 2007tecnosport neiraNo ratings yet
- A Theory of Three-Dimensional Parachute Dynamic Stability: Frank M. White and Dean F. WolfjDocument7 pagesA Theory of Three-Dimensional Parachute Dynamic Stability: Frank M. White and Dean F. WolfjPENANTNo ratings yet
- Bat Flight: Aerodynamics, Kinematics and Flight Morphology: Anders Hedenstro ̈ M and L. Christoffer JohanssonDocument11 pagesBat Flight: Aerodynamics, Kinematics and Flight Morphology: Anders Hedenstro ̈ M and L. Christoffer JohanssonMondoskisNo ratings yet
- Analysis of Fluid Flow Around Airfoils Using Navier-Stokes EquationDocument8 pagesAnalysis of Fluid Flow Around Airfoils Using Navier-Stokes EquationRon'z Neu'z Ven'zNo ratings yet
- BionicDocument13 pagesBionicMANNE SAHITHINo ratings yet
- Aerodynamic Characteristics of The Wing and Body of A Dragonfly - Okamoto 1996Document14 pagesAerodynamic Characteristics of The Wing and Body of A Dragonfly - Okamoto 1996Konstantin PredachenkoNo ratings yet
- Numerical Study of The Unsteady Aerodynamics of Rotating SeedsDocument6 pagesNumerical Study of The Unsteady Aerodynamics of Rotating SeedsademargcjuniorNo ratings yet
- Aerospace Engineering ControlsDocument12 pagesAerospace Engineering Controlsbbarry138No ratings yet
- Thin AirDocument8 pagesThin AirNeetu SharmaNo ratings yet
- Force Production and Asymmetric Deformation of A Flexible Flapping Wing in Forward FlightDocument13 pagesForce Production and Asymmetric Deformation of A Flexible Flapping Wing in Forward FlighthaizhouNo ratings yet
- Taira2009p1347J Fluid MechDocument21 pagesTaira2009p1347J Fluid Mechmd arifNo ratings yet
- Unsteady Force Generation and Vortex Dynamicsof Pitching and Plunging AerofoilsDocument32 pagesUnsteady Force Generation and Vortex Dynamicsof Pitching and Plunging AerofoilsQianZHNo ratings yet
- Achieving Hover Equilibrium in Free Flight With A Flexible Flapping WingDocument23 pagesAchieving Hover Equilibrium in Free Flight With A Flexible Flapping Wingiwe1234No ratings yet
- s41598 019 53625 0 PDFDocument13 pagess41598 019 53625 0 PDFMuhammad Faiz BaihaqiNo ratings yet
- Study and Analysis On The Influence of Flutter FrequencyDocument7 pagesStudy and Analysis On The Influence of Flutter FrequencyJose Manuel Gonzalez ContrerasNo ratings yet
- 1 s2.0 S0167610512001882 MainDocument8 pages1 s2.0 S0167610512001882 Mainufu_santosNo ratings yet
- Simulation of Dynamic Stall For A NACA 0012 Airfoil Using A Vortex MethodDocument20 pagesSimulation of Dynamic Stall For A NACA 0012 Airfoil Using A Vortex MethodAli JavedNo ratings yet
- The Effects of Corrugation and Wing Planform On The Aerodynamic Force Production of Sweeping Model Insect WingsDocument11 pagesThe Effects of Corrugation and Wing Planform On The Aerodynamic Force Production of Sweeping Model Insect WingsAsh SechlerNo ratings yet
- PhysRevFluids 4 034702-AcceptedDocument31 pagesPhysRevFluids 4 034702-AcceptedDhaval SolankiNo ratings yet
- Bath Flapping WingDocument15 pagesBath Flapping Wingnd1977No ratings yet
- Nonlinear Aeroelasticity and Flight Dynamics of High-Altitude Long-Endurance AircraftDocument9 pagesNonlinear Aeroelasticity and Flight Dynamics of High-Altitude Long-Endurance AircraftY.No ratings yet
- Experimental Observation of Wing Rock Phenomenon on Delta WingDocument13 pagesExperimental Observation of Wing Rock Phenomenon on Delta WingChegrani AhmedNo ratings yet
- Ellington 1986Document16 pagesEllington 1986samik4uNo ratings yet
- Asymmetric Behavior of Propeller-Rudder SystemDocument13 pagesAsymmetric Behavior of Propeller-Rudder Systemsumardiono10No ratings yet
- Articulo 1Document17 pagesArticulo 1Arenas Lopez ShermanNo ratings yet
- The Novel Aerodynamics of Insect Flight: Applications To Micro-Air VehiclesDocument10 pagesThe Novel Aerodynamics of Insect Flight: Applications To Micro-Air Vehiclesirfan mujawarNo ratings yet
- Flutter Speed at Various Aspect RatioDocument6 pagesFlutter Speed at Various Aspect RatioMuneeb RazaNo ratings yet
- Aerodynamic Characterisation of Rocket F A5fda0b0Document5 pagesAerodynamic Characterisation of Rocket F A5fda0b0SamiNo ratings yet
- Discussion by Dickinson 2024-03-27 13-21-18Document16 pagesDiscussion by Dickinson 2024-03-27 13-21-18Shun TangNo ratings yet
- Boundary Layer and Flow Control: Its Principles and ApplicationFrom EverandBoundary Layer and Flow Control: Its Principles and ApplicationNo ratings yet
- 10 11648 J Ajae 20150202 11Document5 pages10 11648 J Ajae 20150202 11saraNo ratings yet
- Kites 1Document8 pagesKites 1Jose SalvadorNo ratings yet
- Conceptual Simulator Implementation of Flapping Wing Micro Air Vehicle Using FLAMESDocument18 pagesConceptual Simulator Implementation of Flapping Wing Micro Air Vehicle Using FLAMESKrishna MyakalaNo ratings yet
- Nonlinear Aeroelastic Behavior of Flexible High-Aspect Ratio WingsDocument2 pagesNonlinear Aeroelastic Behavior of Flexible High-Aspect Ratio WingsRamaleela KannanNo ratings yet
- Effects of Flexibility On The Aerodynamic Performance of Flapping WingsDocument46 pagesEffects of Flexibility On The Aerodynamic Performance of Flapping WingsMohammed HusseinNo ratings yet
- Antenna TheoryDocument7 pagesAntenna TheoryRohan GaonkarNo ratings yet
- CV Cassella - WABGroupDocument1 pageCV Cassella - WABGroupCassella AdrianoNo ratings yet
- CVCassellaAdriano v2Document1 pageCVCassellaAdriano v2Cassella AdrianoNo ratings yet
- Statistics of Turbulence and the Onset of ChaosDocument41 pagesStatistics of Turbulence and the Onset of ChaosCassella AdrianoNo ratings yet
- Projet RockyDocument19 pagesProjet RockyCassella AdrianoNo ratings yet
- FSI Report CompressedDocument92 pagesFSI Report CompressedCassella AdrianoNo ratings yet
- Critical Design Review Wildhorn SharedDocument216 pagesCritical Design Review Wildhorn SharedCassella AdrianoNo ratings yet
- Fundamentals of Fluid Mechanics Chapter 10: Open Channel Flow CharacteristicsDocument161 pagesFundamentals of Fluid Mechanics Chapter 10: Open Channel Flow CharacteristicsJuan HeroNo ratings yet
- CFG PumpDocument17 pagesCFG PumpAhmad Syazni Bin MoktarNo ratings yet
- Formula Sheet Pre-MidDocument4 pagesFormula Sheet Pre-MidUzair KhanNo ratings yet
- Fluid Mechanics Properties and EquationsDocument6 pagesFluid Mechanics Properties and EquationscharlesgmartinNo ratings yet
- Homework No 7Document2 pagesHomework No 7WaleedNo ratings yet
- 1.06 Position, Velocity and Acceleration VectorsDocument45 pages1.06 Position, Velocity and Acceleration VectorsaraneyaNo ratings yet
- Investigating Three-Dimensional and Rotational Effects On Wind Turbine Blades by Means of A Quasi-3D Navier-Stokes Solver - ChaviaropoulosDocument7 pagesInvestigating Three-Dimensional and Rotational Effects On Wind Turbine Blades by Means of A Quasi-3D Navier-Stokes Solver - ChaviaropoulosJose Da SilvaNo ratings yet
- Numerical Simulation of Parachute Inflation: A Methodological ReviewDocument31 pagesNumerical Simulation of Parachute Inflation: A Methodological ReviewSai Santhosh ManepallyNo ratings yet
- Branches of Aerodynamics: Conservation LawsDocument2 pagesBranches of Aerodynamics: Conservation LawsKarthiNo ratings yet
- Experimental Aerodyamics SyllabusDocument1 pageExperimental Aerodyamics Syllabustjpk100% (1)
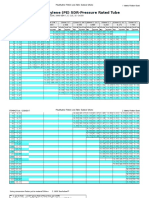
- Polyethylene friction loss chartDocument18 pagesPolyethylene friction loss chartprasadnn2001No ratings yet
- A Water Pump Develops A Total Head of 200 FTDocument3 pagesA Water Pump Develops A Total Head of 200 FTGierald Peralta Inoferio100% (2)
- Generalised Reynolds Equation ExplainedDocument5 pagesGeneralised Reynolds Equation Explainedaditya719No ratings yet
- Wind-Tunnel Tests of Two Airfoils For Wind Turbines Operating at High Reynolds NumbersDocument12 pagesWind-Tunnel Tests of Two Airfoils For Wind Turbines Operating at High Reynolds Numberssuvc mkceNo ratings yet
- Large Structure WakeDocument34 pagesLarge Structure Wakeapi-19969042No ratings yet
- Calculation of Design Tunnel VentilationDocument14 pagesCalculation of Design Tunnel Ventilationpalindapc100% (3)
- 3-1. Hydraulic System PDFDocument30 pages3-1. Hydraulic System PDFmarcelo rojasNo ratings yet
- Expt. 3 - Efflux Time (Prelaboratory)Document30 pagesExpt. 3 - Efflux Time (Prelaboratory)UKissMeow100% (2)
- Review Questions: 3. The Cyclist Has A Mass of 50 KG and Is Accelerating at 0.9 M/sDocument8 pagesReview Questions: 3. The Cyclist Has A Mass of 50 KG and Is Accelerating at 0.9 M/sMohamedNo ratings yet
- Stokes' Law and Terminal Velocity of Coffee FiltersDocument3 pagesStokes' Law and Terminal Velocity of Coffee Filtersabdul_azemiNo ratings yet
- 1) Physical Quantities and UnitsDocument6 pages1) Physical Quantities and UnitsAaron GohNo ratings yet
- Centrifugal Pumps FinalDocument50 pagesCentrifugal Pumps FinalTanjima remuNo ratings yet
- Methods For The Drag Reduction of Bluff Bodies and Their Application To Heavy Road-Vehicles G. Buresti, G.V. Iungo, G. LombardiDocument33 pagesMethods For The Drag Reduction of Bluff Bodies and Their Application To Heavy Road-Vehicles G. Buresti, G.V. Iungo, G. LombardiArpit DodiaNo ratings yet
- Wind Tunnel Testing: Understanding Aerodynamic ForcesDocument51 pagesWind Tunnel Testing: Understanding Aerodynamic ForcesAliakbar ThandlawalaNo ratings yet
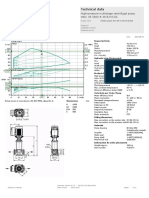
- Data Sheet Helix VE 5205-4-16 E KS 2GDocument1 pageData Sheet Helix VE 5205-4-16 E KS 2GHarshvardhan Mishra100% (1)
- Additive DragDocument10 pagesAdditive DragFahad AliNo ratings yet
- Fluid System 04-Centrifugal PumpDocument46 pagesFluid System 04-Centrifugal PumpFuad AlhamidNo ratings yet
- Measuring Acceleration on an InclineDocument4 pagesMeasuring Acceleration on an InclineGuangyu GuNo ratings yet
- 13 LectureSlidesDocument141 pages13 LectureSlidesOnur YavuzcetinNo ratings yet
- FogDocument8 pagesFogmecatronicatresNo ratings yet