You might also like
- Open Modbus TCP Siemens CPDocument55 pagesOpen Modbus TCP Siemens CPPandaGendutNo ratings yet
- Release Information CODESYS - V3.5 SP6 Patch 4Document15 pagesRelease Information CODESYS - V3.5 SP6 Patch 4Ana Maria CNo ratings yet
- Desigo PX Open PX Modbus: Engineering GuideDocument38 pagesDesigo PX Open PX Modbus: Engineering GuideelhbabacarNo ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- SRS - How to build a Pen Test and Hacking PlatformFrom EverandSRS - How to build a Pen Test and Hacking PlatformRating: 2 out of 5 stars2/5 (1)
- 01 CoDeSys PB Festo CPX-CEC en PDFDocument59 pages01 CoDeSys PB Festo CPX-CEC en PDFJesús Andrés Rodríguez VargasNo ratings yet
- CPX - AP-I - EtherNetIP - App NoteDocument32 pagesCPX - AP-I - EtherNetIP - App NoteOmar BarrazaNo ratings yet
- DCON Utility Pro User Manual: Version 2.0.1, February 2019Document49 pagesDCON Utility Pro User Manual: Version 2.0.1, February 2019harves100% (1)
- PROFINET Controller-Based Automation v1-0 enDocument41 pagesPROFINET Controller-Based Automation v1-0 ennguyen2hoang_4No ratings yet
- EC-C+DC 11.1 ApplicationDocument28 pagesEC-C+DC 11.1 ApplicationMostafaElrakhawyNo ratings yet
- Technical Manual For WSOS Protocol Configuration ToolDocument37 pagesTechnical Manual For WSOS Protocol Configuration ToolRobNo ratings yet
- under NDA: 泰凌 Kite BLE SDK 开发指南Document317 pagesunder NDA: 泰凌 Kite BLE SDK 开发指南毛增No ratings yet
- CP 443-1Document28 pagesCP 443-1Jacob KalloorNo ratings yet
- OCPP 2.0 Specification - RC1 0.97 PDFDocument198 pagesOCPP 2.0 Specification - RC1 0.97 PDFhirocks126No ratings yet
- RTL8309GDocument115 pagesRTL8309GHighFreqSim01No ratings yet
- FKAttend Manual2Document67 pagesFKAttend Manual2Raju KalyadapuNo ratings yet
- EcCST ManualDocument62 pagesEcCST Manualmatius.qNo ratings yet
- IEC 60870 5 102 Intop ACP ENG PDFDocument30 pagesIEC 60870 5 102 Intop ACP ENG PDFMessias De Oliveira SantosNo ratings yet
- EcoStruxure Process Expert Release Notes Foundation LibraryDocument4 pagesEcoStruxure Process Expert Release Notes Foundation LibraryEl el irenNo ratings yet
- Emulex® NVMe Over Fibre Channel - User Guide R12.0Document49 pagesEmulex® NVMe Over Fibre Channel - User Guide R12.0Y.FNo ratings yet
- Prolin Terminal Manager (2.0.2)Document57 pagesProlin Terminal Manager (2.0.2)acoliveira OliveiraNo ratings yet
- O-RAN WG4 IOT 0-v04 00Document122 pagesO-RAN WG4 IOT 0-v04 00mahyar777No ratings yet
- Solutions: IEC Programming For NodesDocument170 pagesSolutions: IEC Programming For NodesMohamed SayariNo ratings yet
- Open Modbus TCP For NCM CP EnglishDocument70 pagesOpen Modbus TCP For NCM CP EnglishRamón F. Zapata SánchezNo ratings yet
- 1 2 3 4 5 CP 343-2 / CP 343-2 P AS-Interface Master Simatic NetDocument134 pages1 2 3 4 5 CP 343-2 / CP 343-2 P AS-Interface Master Simatic NetMike LeeNo ratings yet
- An IND 1 012 CAPL Callback InterfaceDocument14 pagesAn IND 1 012 CAPL Callback InterfaceMohamed A. Hassan BaidaqNo ratings yet
- Modbus Protocol User Guide: Part Number 900-271 Revision N January 2020Document34 pagesModbus Protocol User Guide: Part Number 900-271 Revision N January 2020altieresmirandaNo ratings yet
- Documentation: Festo Positioning Basic Library EVO3 Provides Basis Motion Functionalities For Festo Gantries. ManualDocument24 pagesDocumentation: Festo Positioning Basic Library EVO3 Provides Basis Motion Functionalities For Festo Gantries. ManualAlejandroNo ratings yet
- Connecting Compax3 I22T11 and Allen Bradley / Rockwell Plcs Via DevicenetDocument27 pagesConnecting Compax3 I22T11 and Allen Bradley / Rockwell Plcs Via DevicenetIngeniería 2 ICMANo ratings yet
- ModbusASCII Master eDocument77 pagesModbusASCII Master eSocaciu VioricaNo ratings yet
- Ec200 SeriesDocument28 pagesEc200 SerieshiuNo ratings yet
- Prolin Termassist Operating Guide: Pax Computer Technology Shenzhen Co.,LtdDocument29 pagesProlin Termassist Operating Guide: Pax Computer Technology Shenzhen Co.,Ltdhenry diazNo ratings yet
- Anpr Access Anpr Access HD: Installation GuideDocument36 pagesAnpr Access Anpr Access HD: Installation GuideSaul RamosNo ratings yet
- CLP ControlLogix1756 l63Document64 pagesCLP ControlLogix1756 l632863647No ratings yet
- KP184 - Exe v1 - 0 User ManualDocument65 pagesKP184 - Exe v1 - 0 User ManualJuan Guillermo CardenasNo ratings yet
- ABB Software Product Guide PCM600 Version 2.6Document12 pagesABB Software Product Guide PCM600 Version 2.6razvan_nNo ratings yet
- SYS600 - Modbus Slave ProtocolDocument46 pagesSYS600 - Modbus Slave ProtocolAbhijit JNo ratings yet
- VME64S Vme S C: DatasheetDocument25 pagesVME64S Vme S C: DatasheetprasadkgnairNo ratings yet
- Webaccess Configuration Manual Mitsubishi Fx2NDocument15 pagesWebaccess Configuration Manual Mitsubishi Fx2NNghiêm Xuân TrườngNo ratings yet
- Testing Dynamic Reports: Application NoteDocument17 pagesTesting Dynamic Reports: Application NoteViswanathan NarayananNo ratings yet
- Basic Interoperable Scrambling System With Encrypted KeysDocument16 pagesBasic Interoperable Scrambling System With Encrypted KeysRolando Rollo AlbertiNo ratings yet
- BIS491 Operation Manual All 91228871563Document55 pagesBIS491 Operation Manual All 91228871563rafiq.aliNo ratings yet
- Ethernet Communication Module Manual enDocument76 pagesEthernet Communication Module Manual enAniruth SrisuksawadNo ratings yet
- HowTo - CODESYS Project Update - v1.00Document11 pagesHowTo - CODESYS Project Update - v1.00LucasNo ratings yet
- MCS-BMS-GATEWAY Startup GuideDocument33 pagesMCS-BMS-GATEWAY Startup GuideDũng LêNo ratings yet
- Esp32 Instruction Set enDocument103 pagesEsp32 Instruction Set enpudduNo ratings yet
- CDF600-0100 PROFIBUS-DP Field Bus Module: Module For Connecting A SICK Bar Code Scanner CLV6xx To The PROFIBUS-DPDocument104 pagesCDF600-0100 PROFIBUS-DP Field Bus Module: Module For Connecting A SICK Bar Code Scanner CLV6xx To The PROFIBUS-DPHonzaNo ratings yet
- Open Modbus TCP For NCM - CP Redundant EnglishDocument71 pagesOpen Modbus TCP For NCM - CP Redundant EnglishJose LunaNo ratings yet
- Satchwell: Universal Multi-Loop Intelligent Advanced ControllerDocument24 pagesSatchwell: Universal Multi-Loop Intelligent Advanced ControllerdinhobroderNo ratings yet
- Canopen Profiles For Extruder Downstream Devices: Part 1: General DefinitionsDocument17 pagesCanopen Profiles For Extruder Downstream Devices: Part 1: General Definitionsyomismo garciaNo ratings yet
- MVS System CodesDocument470 pagesMVS System Codesbschuck1No ratings yet
- Modbus Protocol User Guide: Part Number 900-271 Revision M December 2017Document34 pagesModbus Protocol User Guide: Part Number 900-271 Revision M December 2017remikhaledNo ratings yet
- infoPLC - Net - Commissioning of CPX-FB40 With Automation StudioDocument12 pagesinfoPLC - Net - Commissioning of CPX-FB40 With Automation StudioFelipe González moragaNo ratings yet
- Simatic ModbusDocument62 pagesSimatic ModbusStefan IstratescuNo ratings yet
- Opentouch Enterprise Cloud .: Multitenant Otsbc Configuration GuideDocument28 pagesOpentouch Enterprise Cloud .: Multitenant Otsbc Configuration Guidelocuras34No ratings yet
- CODESYS SoftMotion & IndraDrive - EtherCAT CoEDocument33 pagesCODESYS SoftMotion & IndraDrive - EtherCAT CoEAjay SahuNo ratings yet
- FlexRay Preliminary Node-Local Bus Guardian Specification V2.0.9 PDFDocument75 pagesFlexRay Preliminary Node-Local Bus Guardian Specification V2.0.9 PDFGeminiguiNo ratings yet
- MCB 517Document61 pagesMCB 517Diocleciano DantasNo ratings yet
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksFrom EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo ratings yet
- English: Important - Read Before InstallingDocument1 pageEnglish: Important - Read Before InstallingWilson Oviedo HachenNo ratings yet
- Commissioning CANopen Device CMMPDocument23 pagesCommissioning CANopen Device CMMPninja dragonNo ratings yet
- Kubectl Cheat Sheet PDF For Quick ReferencesDocument1 pageKubectl Cheat Sheet PDF For Quick ReferencesWilson Oviedo HachenNo ratings yet
- Simatic Modbus/TCP Connection of Sentron PAC 3200/4200 To A Simatic Pn-CpuDocument39 pagesSimatic Modbus/TCP Connection of Sentron PAC 3200/4200 To A Simatic Pn-CpuWilson Oviedo HachenNo ratings yet
- ME238 Three-Phase Multifunctional Smart Meter With RJ45 Easy Connection V1.0Document46 pagesME238 Three-Phase Multifunctional Smart Meter With RJ45 Easy Connection V1.0Wilson Oviedo HachenNo ratings yet
- ME238 Three-Phase Multifunctional Smart Meter With RJ45 Easy Connection V1.0Document46 pagesME238 Three-Phase Multifunctional Smart Meter With RJ45 Easy Connection V1.0Wilson Oviedo HachenNo ratings yet
- Introduction To Mechanical Apdl (Mapdl) : Chapter 3: APDL ("ANSYS Parametric Design Language")Document14 pagesIntroduction To Mechanical Apdl (Mapdl) : Chapter 3: APDL ("ANSYS Parametric Design Language")Rama BaruvaNo ratings yet
- MIND Seamap GunLink 2500Document4 pagesMIND Seamap GunLink 2500Steve HeartNo ratings yet
- Coding Interview Java (PART-2)Document207 pagesCoding Interview Java (PART-2)Ankush TiwariNo ratings yet
- Company Profile GistekDocument10 pagesCompany Profile GistekFahril ZulprasetyaNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityCynosure SkyNo ratings yet
- How To Create A Bootable Usb DriveDocument5 pagesHow To Create A Bootable Usb DriveJerome Cailo DiazNo ratings yet
- 2300 SERIES: All-In-One 3D Smart Profile SensorsDocument2 pages2300 SERIES: All-In-One 3D Smart Profile SensorsSinthu ChanthapanNo ratings yet
- Microprocessor Project For Simple CalculatorDocument13 pagesMicroprocessor Project For Simple CalculatorFariha NowrinNo ratings yet
- Amf Aut T3658Document20 pagesAmf Aut T3658郭植誠No ratings yet
- Specification of C3560-8PC-SDocument4 pagesSpecification of C3560-8PC-Skadal komersilanNo ratings yet
- CsLab2 Pritam Das 17ETCS002130Document5 pagesCsLab2 Pritam Das 17ETCS002130Pritam DasNo ratings yet
- ACSPL+ Programmer's GuideDocument380 pagesACSPL+ Programmer's Guidepin chengNo ratings yet
- Quantum TrainingDocument2 pagesQuantum TrainingNagajyothi KodaliNo ratings yet
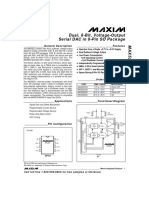
- Dual, 8-Bit, Voltage-Output Serial DAC in 8-Pin SO PackageDocument12 pagesDual, 8-Bit, Voltage-Output Serial DAC in 8-Pin SO PackagemvpgmNo ratings yet
- Third - Year - Information Technology - 2019 - Course - 09.07.2021Document114 pagesThird - Year - Information Technology - 2019 - Course - 09.07.2021Dhiraj GawhaneNo ratings yet
- The Inventor MentorDocument271 pagesThe Inventor MentorΑρετή ΣταματούρουNo ratings yet
- Digital Forensics Tools for InvestigationsDocument51 pagesDigital Forensics Tools for InvestigationsisraaNo ratings yet
- Asc Timetables en L4Document128 pagesAsc Timetables en L4mehari kirosNo ratings yet
- SP Series: Gigabit Small Form-Factor Pluggable ModulesDocument2 pagesSP Series: Gigabit Small Form-Factor Pluggable ModuleshaydocNo ratings yet
- What Is The TCP/IP Model? TCP/IP Model Helps You To Determine How A Specific Computer Should BeDocument18 pagesWhat Is The TCP/IP Model? TCP/IP Model Helps You To Determine How A Specific Computer Should BePhilip EdebuNo ratings yet
- Mazak Matrix Automatic NC Backup ProcedureDocument6 pagesMazak Matrix Automatic NC Backup ProcedureTensaiga100% (2)
- Nov Dec 2018Document2 pagesNov Dec 2018pecoxor808No ratings yet
- Resume Software EngineerDocument4 pagesResume Software Engineerkumar.sira0% (1)
- DeadByDaylight file timestampsDocument4 pagesDeadByDaylight file timestampsNilexNo ratings yet
- Unit Unit: Installation and Configuration of Operating SystemDocument17 pagesUnit Unit: Installation and Configuration of Operating Systemanshuman singhNo ratings yet
- Cisco Unified Communications Manager TCP and UDP Port UsageDocument18 pagesCisco Unified Communications Manager TCP and UDP Port UsageJames HavocNo ratings yet
- Documentação Da Pricing de Compras Pelo Preço BrutoDocument23 pagesDocumentação Da Pricing de Compras Pelo Preço BrutoMarcos PauloNo ratings yet
- Exadata 19.3.11.0.0 Release and Patch (31724174) (Doc ID 2686927.1)Document2 pagesExadata 19.3.11.0.0 Release and Patch (31724174) (Doc ID 2686927.1)Ganesh JNo ratings yet
- Centurion University of Technology and Managament: Topic: Numpy, Pandas, MatplotlibDocument12 pagesCenturion University of Technology and Managament: Topic: Numpy, Pandas, Matplotlibnarendra reddyNo ratings yet
- Solar WindsDocument13 pagesSolar WindsOchieng MosesNo ratings yet