You might also like
- Robust Fault-Tolerant Control Allocation For An Input-Redundant AircraftDocument10 pagesRobust Fault-Tolerant Control Allocation For An Input-Redundant Aircraftkishan2016No ratings yet
- 1 s2.0 S026322411730324X MainDocument14 pages1 s2.0 S026322411730324X MainSanika RasalNo ratings yet
- Design and Simulation of A UAV Controller System With High ManeuverabilityDocument6 pagesDesign and Simulation of A UAV Controller System With High ManeuverabilityDeniz Can ÇetinelNo ratings yet
- Decentralized Spatial-Temporal Trajectory Planning For Multicopter SwarmsDocument9 pagesDecentralized Spatial-Temporal Trajectory Planning For Multicopter SwarmsCaehhsegffNo ratings yet
- Optimal Aircraft Go-Around and Maneuvers: FlareDocument10 pagesOptimal Aircraft Go-Around and Maneuvers: Flareomid20000No ratings yet
- Analysis of Forces Involved in The Perching Maneuver of Flapping-Wing Aerial Systems and Development of An Ultra-Lightweight Perching SystemDocument7 pagesAnalysis of Forces Involved in The Perching Maneuver of Flapping-Wing Aerial Systems and Development of An Ultra-Lightweight Perching SystemNisha KamarajNo ratings yet
- How Rapid TransferDocument9 pagesHow Rapid TransferSourabhYadavNo ratings yet
- Optimization of Three Loop Missile Autopilot Gain Under CR 2016Document7 pagesOptimization of Three Loop Missile Autopilot Gain Under CR 2016Dmytro ShumlianskyiNo ratings yet
- Robust Control For UAV Close Formation Using LADRC Via Sine-Powered Pigeon-Inspired Optimization 2023Document26 pagesRobust Control For UAV Close Formation Using LADRC Via Sine-Powered Pigeon-Inspired Optimization 2023Muhammad ShafiqNo ratings yet
- Inverted Delta Wig Effect Aircraft 1Document92 pagesInverted Delta Wig Effect Aircraft 1xxxguysNo ratings yet
- Detection of Aircraft Touchdown Using Longitudinal Acceleration and Continuous Wavelet TransformationDocument25 pagesDetection of Aircraft Touchdown Using Longitudinal Acceleration and Continuous Wavelet TransformationAshwin RaiNo ratings yet
- 10 1061@asceas 1943-5525 0001089Document16 pages10 1061@asceas 1943-5525 0001089Peps Peps PepsNo ratings yet
- Ramp InspectionsDocument50 pagesRamp InspectionspannipitiyaNo ratings yet
- Shao 2021Document10 pagesShao 2021Mou KhalilNo ratings yet
- Flight Control of A 1-DOF Helicopter System Using A Sliding Mode Controller For Disturbance RejectionDocument7 pagesFlight Control of A 1-DOF Helicopter System Using A Sliding Mode Controller For Disturbance RejectionfsdvNo ratings yet
- Robust Integrated Flight Control Design Under Failures, Damage, and State-Dependent DisturbancesDocument19 pagesRobust Integrated Flight Control Design Under Failures, Damage, and State-Dependent Disturbanceskishan2016No ratings yet
- Real-Time Simulation of A COGAG Naval Ship Propulsion SystemDocument15 pagesReal-Time Simulation of A COGAG Naval Ship Propulsion SystemCarlos PariNo ratings yet
- Boller 2000Document18 pagesBoller 2000Rizky C. AriestaNo ratings yet
- Tata 62 69 ATR Sep15 PDFDocument5 pagesTata 62 69 ATR Sep15 PDF9629330773No ratings yet
- Application Research of Mrac in Fault Tolerant Flight ControllerDocument10 pagesApplication Research of Mrac in Fault Tolerant Flight ControllerNilesh LambeNo ratings yet
- An Integrated Coating Inspection System For Marine and Offshore Corrosion ManagementDocument6 pagesAn Integrated Coating Inspection System For Marine and Offshore Corrosion ManagementAmal ZakirNo ratings yet
- H HHHH HHHH HHHH HHHHDocument7 pagesH HHHH HHHH HHHH HHHHJonathan GomezNo ratings yet
- Coping With Construction in Operational AirportsDocument12 pagesCoping With Construction in Operational Airportslia bayuNo ratings yet
- A Trajectory Tracking Control Design For Fixed-Wing Unmanned Aerial VehiclesDocument6 pagesA Trajectory Tracking Control Design For Fixed-Wing Unmanned Aerial Vehicleselguerrero66No ratings yet
- RLV Reenrty PhasDocument6 pagesRLV Reenrty PhasShubham KaduNo ratings yet
- A Microcontroller Implementation of Constrained Model Predictive ControlDocument8 pagesA Microcontroller Implementation of Constrained Model Predictive Controlmohamed mourad LafifiNo ratings yet
- Nasa Deck SystemDocument16 pagesNasa Deck SystemmontymilkyNo ratings yet
- Approach To Assure SafetyDocument6 pagesApproach To Assure SafetyM N AnanthaNo ratings yet
- What Makes Some Control Problems HardDocument12 pagesWhat Makes Some Control Problems HardmixarimNo ratings yet
- Trustworthy Reinforcement Learning For Quadrotor UAV Tracking Control SystemsDocument14 pagesTrustworthy Reinforcement Learning For Quadrotor UAV Tracking Control Systemssumeet sahuNo ratings yet
- Identification and Validation of A Quadrotor's Model DynamicsDocument9 pagesIdentification and Validation of A Quadrotor's Model DynamicsJuan SebastianNo ratings yet
- Text of AeroDocument9 pagesText of Aerokilicalemdar883No ratings yet
- Robust Attitude Control of An Agile Aircraft UsingDocument17 pagesRobust Attitude Control of An Agile Aircraft UsingshahNo ratings yet
- Leader-Follower UAV Formation Flight Control Based On Feature ModellingDocument11 pagesLeader-Follower UAV Formation Flight Control Based On Feature ModellingRahulNo ratings yet
- Disturbance Compensating MPC With Application To Ship Heading Control - Great IdeaDocument9 pagesDisturbance Compensating MPC With Application To Ship Heading Control - Great Idearawand ehssanNo ratings yet
- Ansys FlutterDocument2 pagesAnsys Flutterfhd_bdNo ratings yet
- Deep Reinforcement Learning For UAV NavigationThrough Massive MIMO TechniqueDocument6 pagesDeep Reinforcement Learning For UAV NavigationThrough Massive MIMO TechniqueYing SiNo ratings yet
- A Deep Reinforcement Learning Control Approach For High-Performance AircraftDocument41 pagesA Deep Reinforcement Learning Control Approach For High-Performance AircraftDavood AsadihendoustaniNo ratings yet
- Jurnal 42Document18 pagesJurnal 42fikri aryantoNo ratings yet
- Resilient Flight Control An Architecture For Human Supervision of AutomationDocument14 pagesResilient Flight Control An Architecture For Human Supervision of AutomationCarlos F A MouraNo ratings yet
- 069-En Monitoring Mobile06Document7 pages069-En Monitoring Mobile06xxshNo ratings yet
- CX JAIS2021Document10 pagesCX JAIS2021coopter zhangNo ratings yet
- Riyanferdiyanto 17117003 Pengecoran Dan Heat Treatment LogamDocument10 pagesRiyanferdiyanto 17117003 Pengecoran Dan Heat Treatment LogamRiyan FerdiyantoNo ratings yet
- Novel Flight Management System For Improved Safety and Sustainability in The CNS+A ContextDocument12 pagesNovel Flight Management System For Improved Safety and Sustainability in The CNS+A ContextBelinda KoyaiyeNo ratings yet
- Performance and Stability Analysis of An Autonomous Underwater Vehicle Guidance and ControlDocument7 pagesPerformance and Stability Analysis of An Autonomous Underwater Vehicle Guidance and ControlSuman SahaNo ratings yet
- UAV Model-Based Flight Control With Artificial Neural - SurveyDocument23 pagesUAV Model-Based Flight Control With Artificial Neural - Surveywovaj97072No ratings yet
- Lo Quadrotor With MPC Model ImplementationDocument28 pagesLo Quadrotor With MPC Model ImplementationSai NavaneetNo ratings yet
- Preliminary Studies Aviation: Design OF An Advanced General AircraftDocument12 pagesPreliminary Studies Aviation: Design OF An Advanced General AircraftkostarasNo ratings yet
- Design and Development of A Passive Propellant Management SystemDocument6 pagesDesign and Development of A Passive Propellant Management SystemhuNo ratings yet
- Enhancing Performance and Stability of Gain-Scheduling Control SystemDocument21 pagesEnhancing Performance and Stability of Gain-Scheduling Control SystemAisha Sir ElkhatemNo ratings yet
- 1865-Article Text - Manuscript-6881-1-10-20120328Document8 pages1865-Article Text - Manuscript-6881-1-10-20120328rajrdy4No ratings yet
- Adaptive Backstepping Fault Tolerant Control For Flexible Spacecraft With Unknown Bounded Disturbances and Actuator Failures 2010 ISA TransactionsDocument13 pagesAdaptive Backstepping Fault Tolerant Control For Flexible Spacecraft With Unknown Bounded Disturbances and Actuator Failures 2010 ISA TransactionsAravindan MohanNo ratings yet
- Adaptive Fixed-Time Fault-Tolerant Tracking Control and Its Application For Robot Manipulators PDFDocument10 pagesAdaptive Fixed-Time Fault-Tolerant Tracking Control and Its Application For Robot Manipulators PDFzhuang liuNo ratings yet
- Minimum-Time Path Planning For Autonomous Landing of UAV On Aerial Drone CarrierDocument6 pagesMinimum-Time Path Planning For Autonomous Landing of UAV On Aerial Drone CarrierSofia KaramitsianiNo ratings yet
- Aircraft Landing GearDocument32 pagesAircraft Landing GearsidatcchayaNo ratings yet
- Triple-Triple Redundant Reliable Onboard PDFDocument8 pagesTriple-Triple Redundant Reliable Onboard PDFCanan TAYGURTNo ratings yet
- Heterogeneous Robotic Systems For AssembDocument7 pagesHeterogeneous Robotic Systems For AssembrickyNo ratings yet
- Static Sectorization Approach To Dynamic Airspace Configuration Using Approximate Dynamic ProgrammingDocument11 pagesStatic Sectorization Approach To Dynamic Airspace Configuration Using Approximate Dynamic Programmingodic2002No ratings yet
- Introduction to Fly-By-Wire Flight Control SystemsFrom EverandIntroduction to Fly-By-Wire Flight Control SystemsRating: 5 out of 5 stars5/5 (1)
- VIL Begins OperationsDocument6 pagesVIL Begins OperationsSunil JainNo ratings yet
- Ed Tech 1 Lesson 1Document22 pagesEd Tech 1 Lesson 1Joshua SeñarosaNo ratings yet
- T G RS-485: Roubleshooting Uide ForDocument4 pagesT G RS-485: Roubleshooting Uide ForMaki MoammerNo ratings yet
- IOM - Handte Vortex DualDocument30 pagesIOM - Handte Vortex Duallavanesh1996No ratings yet
- Ma KR120R3200 PaDocument240 pagesMa KR120R3200 Pajohnstn4544No ratings yet
- 365C 385C NPI Large Hydraulic Information IDocument18 pages365C 385C NPI Large Hydraulic Information IAnjelo Jeanhpool Hidalgo AlvaradoNo ratings yet
- Company Brochure 2023Document2 pagesCompany Brochure 2023Leon du PlessisNo ratings yet
- Samsung EDGE CaseStudyDocument5 pagesSamsung EDGE CaseStudyVats ChalukNo ratings yet
- Datasheet - MSP 452-11/11Y: Ordering DetailsDocument4 pagesDatasheet - MSP 452-11/11Y: Ordering DetailsTecno Industrias C.A.No ratings yet
- Process Industry Practices Vessels: PIP VEFV6100 Vessels/S&T Heat Exchangers Internals DetailsDocument4 pagesProcess Industry Practices Vessels: PIP VEFV6100 Vessels/S&T Heat Exchangers Internals Detailsmsaldivar177No ratings yet
- VLSI - T&T - ECT624 - Course File - MNIT - 06082019 PDFDocument8 pagesVLSI - T&T - ECT624 - Course File - MNIT - 06082019 PDFHARSHIT GARGNo ratings yet
- Digital Twins Revolutionizing Public Services For A Digital FutureDocument2 pagesDigital Twins Revolutionizing Public Services For A Digital Futuremarthen solangNo ratings yet
- (IT Risk Profiles) Server Security Management by Eav Bunthen (Finalized)Document4 pages(IT Risk Profiles) Server Security Management by Eav Bunthen (Finalized)Shaleh Sen100% (1)
- IEEE CED SubDesign Full SizeDocument177 pagesIEEE CED SubDesign Full Sizebubo28100% (4)
- Flexlm Cracking TutorialDocument8 pagesFlexlm Cracking TutorialminchiasapasitasNo ratings yet
- Networking: PPT Requirement For Students As AprojectDocument22 pagesNetworking: PPT Requirement For Students As Aproject10chirag10100% (1)
- Accounting Information Systems in The Blockchain EraDocument18 pagesAccounting Information Systems in The Blockchain EraTumbal PogoNo ratings yet
- Tutorial-3 AnsDocument6 pagesTutorial-3 AnsMMhammed AlrowailyNo ratings yet
- The Removal and Fitting of Engines in Bus F94: Issue 1Document12 pagesThe Removal and Fitting of Engines in Bus F94: Issue 1RuanNo ratings yet
- SA2008-000355 en Universal Testing Method For Power Transformer DifferentiaDocument15 pagesSA2008-000355 en Universal Testing Method For Power Transformer DifferentiaRatheesh KumarNo ratings yet
- StreamDocument8 pagesStreamtanajm60No ratings yet
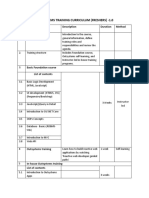
- Outsystems Training Curriculum (Freshers)Document3 pagesOutsystems Training Curriculum (Freshers)Chethan BkNo ratings yet
- Building A Flutter Project An Understanding The TermsDocument7 pagesBuilding A Flutter Project An Understanding The TermsSujal ShresthaNo ratings yet
- Distributor Installation: Crankshaft Position Sensor RemovalDocument2 pagesDistributor Installation: Crankshaft Position Sensor RemovalKeyboardMan1960No ratings yet
- TVS Iyengar DirectoryDocument45 pagesTVS Iyengar Directoryveena gupta50% (2)
- Tejb9628 00Document64 pagesTejb9628 00DinaNo ratings yet
- Harmonic Filter Design PDFDocument14 pagesHarmonic Filter Design PDFserban_elNo ratings yet
- Manual Ne40 HuaweiDocument474 pagesManual Ne40 HuaweibigdrsmithNo ratings yet
- Client - Barber Journey-1Document3 pagesClient - Barber Journey-1abuzarofficaldevNo ratings yet
- ShraddhaMishra CV PDFDocument1 pageShraddhaMishra CV PDFPunyak SatishNo ratings yet