You might also like
- Process Performance Models: Statistical, Probabilistic & SimulationFrom EverandProcess Performance Models: Statistical, Probabilistic & SimulationNo ratings yet
- Schwaninger (2011) SystemDynamicsModelingValidatiDocument15 pagesSchwaninger (2011) SystemDynamicsModelingValidatiJOSENo ratings yet
- Simulation Research MethodsDocument40 pagesSimulation Research Methodsfhanum13No ratings yet
- 14 PDFDocument15 pages14 PDFAnonymous cxNsEvNo ratings yet
- P.N.B-Loan Consumer BehaviorDocument108 pagesP.N.B-Loan Consumer BehaviorKartik SoniNo ratings yet
- S, Anno LXIII, N. 2, 2003: TatisticaDocument22 pagesS, Anno LXIII, N. 2, 2003: TatisticaAbhraneilMeitBhattacharyaNo ratings yet
- Structural Dominance Analysis and Theory Building in System DynamicsDocument15 pagesStructural Dominance Analysis and Theory Building in System DynamicsGUILLERMO CUENTAS SANTARIANo ratings yet
- Assignment - 01: Department of Computer Science & EngineeringDocument8 pagesAssignment - 01: Department of Computer Science & Engineeringfourth year projectNo ratings yet
- Epfl Chapter 7Document18 pagesEpfl Chapter 7ioanciorneiNo ratings yet
- Fornell 1981Document7 pagesFornell 1981Khairudin AhmadNo ratings yet
- Modelling Concepts and ClassificationDocument11 pagesModelling Concepts and ClassificationAshley MendozaNo ratings yet
- Simulation Research Methods: Kevin - Dooley@asu - EduDocument39 pagesSimulation Research Methods: Kevin - Dooley@asu - Edutomor2No ratings yet
- Doing The Four Step RightDocument39 pagesDoing The Four Step RightDiether EspirituNo ratings yet
- Validation of Simulation Based Models: A Theoretical OutlookDocument8 pagesValidation of Simulation Based Models: A Theoretical OutlookgreghladiyNo ratings yet
- Reality Checks in VENSIM: Conceptualization & Application: State University of New York University at AlbanyDocument10 pagesReality Checks in VENSIM: Conceptualization & Application: State University of New York University at Albanyjose valdesNo ratings yet
- Item Response Theory PDFDocument31 pagesItem Response Theory PDFSyahida Iryani100% (1)
- Mathematical Modeling in Chemical EngineeringDocument25 pagesMathematical Modeling in Chemical Engineerings9n9No ratings yet
- Multiple Group Path Analysis Final Jan 2021Document27 pagesMultiple Group Path Analysis Final Jan 2021ZetsiNo ratings yet
- 1 s2.0 S0957417409005119 MainDocument10 pages1 s2.0 S0957417409005119 MainBirce BogaNo ratings yet
- Characteristics of SEM: Cov R SD SDDocument9 pagesCharacteristics of SEM: Cov R SD SDHans JonniNo ratings yet
- Path Analysis vs. Structural Equation Modeling: Marketing Research January 2000Document11 pagesPath Analysis vs. Structural Equation Modeling: Marketing Research January 2000Lien NguyenNo ratings yet
- OO TestingDocument18 pagesOO TestingUsama Bin AlamNo ratings yet
- Verified BiologyDocument22 pagesVerified BiologyBababa EkeNo ratings yet
- Design ConsiderationDocument8 pagesDesign ConsiderationRohit NewarNo ratings yet
- # RESEARCH METHODOLOGY Review On Comfirmatory Factor AnalysisDocument22 pages# RESEARCH METHODOLOGY Review On Comfirmatory Factor AnalysisMintiNo ratings yet
- Path AnalysisDocument11 pagesPath AnalysisCirine ZouaidiNo ratings yet
- Turner (2020)Document37 pagesTurner (2020)Dhara Kusuma WardhaniNo ratings yet
- Mathematical Modeling and Numerical Analysis M.SC PDFDocument163 pagesMathematical Modeling and Numerical Analysis M.SC PDFZaidoon MohsinNo ratings yet
- Model Validation: Correlation For Updating: D J EwinsDocument14 pagesModel Validation: Correlation For Updating: D J EwinsChandan Kumar RayNo ratings yet
- Model Validation - Correlation For UpdatingDocument14 pagesModel Validation - Correlation For Updatingsumatrablackcoffee453No ratings yet
- Structural Equation ModelingDocument42 pagesStructural Equation ModelingMuhammad Asad AliNo ratings yet
- Scientific Modelling WorksheetDocument8 pagesScientific Modelling WorksheetnettextsNo ratings yet
- UNIT - I - Basics of Modelling - SCH1401: School of Bio and Chemical Department of Chemical EngineeringDocument111 pagesUNIT - I - Basics of Modelling - SCH1401: School of Bio and Chemical Department of Chemical EngineeringSaurabh KinareNo ratings yet
- Mathematical Model - WikipediaDocument11 pagesMathematical Model - WikipediaDAVID MURILLONo ratings yet
- Model CheckingDocument6 pagesModel CheckingRicardo AqpNo ratings yet
- Validating Computational Models: Kathleen M. CarleyDocument24 pagesValidating Computational Models: Kathleen M. CarleyhGNo ratings yet
- Mathematical ModelDocument11 pagesMathematical Modelhasan jamiNo ratings yet
- 1 Introduction To Digital Simulation: 1.1 Types of SystemsDocument11 pages1 Introduction To Digital Simulation: 1.1 Types of SystemsAT LuzNo ratings yet
- Combining State-Based and Scenario-Based Approaches in Modeling Biological SystemsDocument6 pagesCombining State-Based and Scenario-Based Approaches in Modeling Biological SystemsBababa EkeNo ratings yet
- Vanden Hof ClipidDocument20 pagesVanden Hof ClipidnelsobedinNo ratings yet
- 代理模型2Document13 pages代理模型2785902070No ratings yet
- Adaptivity Modeling For Complex Adaptive Systems With Application To BiologyDocument1 pageAdaptivity Modeling For Complex Adaptive Systems With Application To BiologyAngieCardenasNo ratings yet
- 724 Lec 12Document2 pages724 Lec 12Ermias AbelnehNo ratings yet
- Quantitative Analysis Indidual AssignmentDocument8 pagesQuantitative Analysis Indidual AssignmentwelduNo ratings yet
- Structural Equation Models: The BasicsDocument15 pagesStructural Equation Models: The BasicsTmazvelNo ratings yet
- CD Player State DiagramDocument14 pagesCD Player State DiagramCfhunSaatNo ratings yet
- Athey 2015Document2 pagesAthey 2015MunirNo ratings yet
- PA 765 - Factor AnalysisDocument18 pagesPA 765 - Factor AnalysisAnoop Slathia100% (1)
- Capelo 1998Document15 pagesCapelo 1998ericksonyanambuNo ratings yet
- Studying Complex Adaptive Systems: John H. HollandDocument8 pagesStudying Complex Adaptive Systems: John H. HollandrastalaryNo ratings yet
- Structural Equation ModelingDocument8 pagesStructural Equation ModelingfriendshipppNo ratings yet
- 1 s2.0 S0272696315000595 Main PDFDocument5 pages1 s2.0 S0272696315000595 Main PDFAnhNo ratings yet
- 4 Methods of Verification and ValidationDocument9 pages4 Methods of Verification and ValidationIvonne HernandezNo ratings yet
- Best Generalisation Error PDFDocument28 pagesBest Generalisation Error PDFlohit12No ratings yet
- Agent Based Modeling and Simulation: An Informatics Agent Based Modeling and Simulation: An Informatics Perspective PerspectiveDocument16 pagesAgent Based Modeling and Simulation: An Informatics Agent Based Modeling and Simulation: An Informatics Perspective PerspectivebanchosNo ratings yet
- Monitoring, Fault Diagnosis, Fault-Tolerant Control and Optimization: Data Driven MethodsDocument12 pagesMonitoring, Fault Diagnosis, Fault-Tolerant Control and Optimization: Data Driven MethodsbenNo ratings yet
- Stelzl 1986Document25 pagesStelzl 1986mkubra44No ratings yet
- Computer Simulation-and-ModelingDocument12 pagesComputer Simulation-and-ModelingRohit AcharyaNo ratings yet
- Basic 1 Ullman SemDocument17 pagesBasic 1 Ullman SemGaurav 02No ratings yet
- Simulation Modelling Practice and Theory: Fei-Yan Min, Ming Yang, Zi-Cai WangDocument16 pagesSimulation Modelling Practice and Theory: Fei-Yan Min, Ming Yang, Zi-Cai WangAmir JoonNo ratings yet
- SAE-J1850 Communication Protocol Conformity Transmission Controller For Automotive LANDocument59 pagesSAE-J1850 Communication Protocol Conformity Transmission Controller For Automotive LANMa Ngoc TrungNo ratings yet
- IT6602 SA Coaching Class QuestionsDocument3 pagesIT6602 SA Coaching Class QuestionsvinothNo ratings yet
- Reflection and ShearDocument7 pagesReflection and ShearsamNo ratings yet
- Perfection v700 Photo PDFDocument90 pagesPerfection v700 Photo PDFAlex1963alexNo ratings yet
- Long Quiz Direct VariationDocument2 pagesLong Quiz Direct VariationHermann Dejero LozanoNo ratings yet
- Project Report On Modulation (Class 12)Document14 pagesProject Report On Modulation (Class 12)Shivam Tripathi100% (9)
- 1 Logic GatesDocument4 pages1 Logic GatesdassonyNo ratings yet
- Guide c07 742458Document14 pagesGuide c07 742458Chen ComseNo ratings yet
- SampleDocument43 pagesSampleSri E.Maheswar Reddy Assistant ProfessorNo ratings yet
- Septic Tank - Components and Design of Septic Tank Based On PopulationDocument7 pagesSeptic Tank - Components and Design of Septic Tank Based On Populationمنير أحمدNo ratings yet
- Fpls 12 764103Document10 pagesFpls 12 764103Pawan MishraNo ratings yet
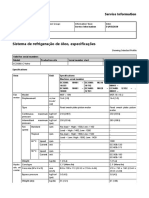
- Sistema de Refrigeração de Óleo, EspecificaçõesDocument2 pagesSistema de Refrigeração de Óleo, EspecificaçõesAlexandreNo ratings yet
- Jaap's Puzzle PageDocument1 pageJaap's Puzzle PagePhilippe DenielNo ratings yet
- NPTEL CC Assignment4Document4 pagesNPTEL CC Assignment4Paul Stark100% (1)
- Mole Day Project Report RevisedDocument5 pagesMole Day Project Report Revisedapi-267301173No ratings yet
- Planets and Solar System The Complete Manual 2016Document132 pagesPlanets and Solar System The Complete Manual 2016Sonechka Sonya100% (3)
- HabilitationDocument186 pagesHabilitationAland MediaNo ratings yet
- Chapter 2 Approaches To Software DesignDocument25 pagesChapter 2 Approaches To Software DesigntarunkakkarNo ratings yet
- SPE15010Document11 pagesSPE15010Leandro NavarroNo ratings yet
- Perawatan Pasien Dengan Gips Cast Skill LabDocument36 pagesPerawatan Pasien Dengan Gips Cast Skill LabFadhilah putri fertyciaNo ratings yet
- A Geometry Surveying Model and Instrument of A Scraper Conveyor in Unmanned Longwall Mining FacesDocument9 pagesA Geometry Surveying Model and Instrument of A Scraper Conveyor in Unmanned Longwall Mining FacesEviNo ratings yet
- Intro 4 - Substantive Concepts: Description Remarks and Examples References Also SeeDocument19 pagesIntro 4 - Substantive Concepts: Description Remarks and Examples References Also SeeAntonella PetrilloNo ratings yet
- SPE-121928 Field Development and Productivity Improvement in ... Synergistic Approach To Carbonate Fracture AcidizingDocument10 pagesSPE-121928 Field Development and Productivity Improvement in ... Synergistic Approach To Carbonate Fracture AcidizingBruceNo ratings yet
- Fixed Frequency, 99% Duty Cycle Peak Current Mode Notebook System Power ControllerDocument44 pagesFixed Frequency, 99% Duty Cycle Peak Current Mode Notebook System Power ControllerAualasNo ratings yet
- Statistics Hand NotesDocument16 pagesStatistics Hand NotesAtul VermaNo ratings yet
- SRU Presentation For NewDocument47 pagesSRU Presentation For Newviettanct100% (3)
- CORE JAVA (3-0-0) Module - I (10 Hours)Document3 pagesCORE JAVA (3-0-0) Module - I (10 Hours)Rupak BhuyanNo ratings yet
- Converting CLOBs 2 VARCHARDocument15 pagesConverting CLOBs 2 VARCHARMa GicNo ratings yet
- Module 2 Notes - PSOCDocument24 pagesModule 2 Notes - PSOCpriyaNo ratings yet
- Economics Solution Book PDFDocument368 pagesEconomics Solution Book PDFgoutam1235100% (3)