You might also like
- Machine Intelligence and Pattern RecognitionFrom EverandMachine Intelligence and Pattern RecognitionRating: 5 out of 5 stars5/5 (2)
- Corossion DetectionDocument6 pagesCorossion Detectionsuresh mpNo ratings yet
- applsci-12-10602 (1) (3)Document15 pagesapplsci-12-10602 (1) (3)satwikNo ratings yet
- 20397-Article Text-24410-1-2-20220628Document9 pages20397-Article Text-24410-1-2-20220628sdhpNo ratings yet
- Comparison of Deep Concolutional Neural Networks and Edge Detectors For Image-Based Crack Detection in ConcreteDocument15 pagesComparison of Deep Concolutional Neural Networks and Edge Detectors For Image-Based Crack Detection in ConcreteCamilo matta torresNo ratings yet
- DiagnosticsDocument4 pagesDiagnostics16061977No ratings yet
- Li 2021Document14 pagesLi 2021Edgar Enrique Vilca RomeroNo ratings yet
- Computers and Geotechnics: Shaoqun Dong, Lianbo Zeng, Peter Dowd, Chaoshui Xu, Han CaoDocument12 pagesComputers and Geotechnics: Shaoqun Dong, Lianbo Zeng, Peter Dowd, Chaoshui Xu, Han CaoDiego Tafur LópezNo ratings yet
- ObbDocument27 pagesObbSachin GNo ratings yet
- A Hybrid Method For Performance Analysis of Queueing NetworksDocument12 pagesA Hybrid Method For Performance Analysis of Queueing NetworksFelipe VargasNo ratings yet
- Constrained Delaunay Mesh GenerationDocument20 pagesConstrained Delaunay Mesh GenerationAjayaKumarKavalaNo ratings yet
- K-Node Set Reliability Optimization of A Distributed Computing System Using Particle Swarm AlgorithmDocument10 pagesK-Node Set Reliability Optimization of A Distributed Computing System Using Particle Swarm AlgorithmOyeniyi Samuel KehindeNo ratings yet
- Three Article Jean 805415007Document23 pagesThree Article Jean 805415007rootit01No ratings yet
- Generalized-ICP improves scan matchingDocument8 pagesGeneralized-ICP improves scan matchingJasNo ratings yet
- Automatic Crack Detection and Measurement Based On Image AnaDocument8 pagesAutomatic Crack Detection and Measurement Based On Image Anab3d.dharoharNo ratings yet
- Efficient Heuristic Generation for Robot Path Planning with Recurrent Generative ModelDocument7 pagesEfficient Heuristic Generation for Robot Path Planning with Recurrent Generative ModelVarun AgarwalNo ratings yet
- A Crack Detection Method For Pipelines Using Wavelet-Based Decision-Level Data FusionDocument19 pagesA Crack Detection Method For Pipelines Using Wavelet-Based Decision-Level Data Fusion朱波No ratings yet
- Symmetry 14 00349 v2Document13 pagesSymmetry 14 00349 v2saurav.iitianiitkgp.ac.inNo ratings yet
- Target Detection Based On Normalized Cross Co-Relation: Niladri Shekhar Das, S. Arunvinthan, E. GiriprasadDocument7 pagesTarget Detection Based On Normalized Cross Co-Relation: Niladri Shekhar Das, S. Arunvinthan, E. GiriprasadinventionjournalsNo ratings yet
- Traffic Surveillance Camera Calibration by 3D Model B - 2017 - Computer Vision ADocument12 pagesTraffic Surveillance Camera Calibration by 3D Model B - 2017 - Computer Vision Amaanka aliNo ratings yet
- BVH For CDDocument12 pagesBVH For CDSiti Hasnah Mea TanalolNo ratings yet
- Constrained Fitting of B-Spline Curves Based Onthe Force Density MethodDocument7 pagesConstrained Fitting of B-Spline Curves Based Onthe Force Density MethodBobNo ratings yet
- Unsupervised Machine Learning On A Hybrid Quantum ComputerDocument17 pagesUnsupervised Machine Learning On A Hybrid Quantum ComputerKatherine GilberNo ratings yet
- A Case-Study in Open-Source CFD Code Verification, Part I: Convergence Rate Loss DiagnosisDocument20 pagesA Case-Study in Open-Source CFD Code Verification, Part I: Convergence Rate Loss DiagnosisMarco NicotraNo ratings yet
- Displacement Estimation of A RC Beam Test Based On TSS AlgorithmDocument4 pagesDisplacement Estimation of A RC Beam Test Based On TSS AlgorithmAdriana Montilla BolañosNo ratings yet
- A Methodology To Learn Designing Optimal Mechanisms For Path GenerationDocument6 pagesA Methodology To Learn Designing Optimal Mechanisms For Path GenerationBilal OraikNo ratings yet
- CMPT757 - Paper 9Document1 pageCMPT757 - Paper 9tho121.thNo ratings yet
- Detect Digital Image Splicing with Visual CuesDocument16 pagesDetect Digital Image Splicing with Visual CuesSrilakshmi VNo ratings yet
- 2019 Qi Et Al JCP Curvature MLDocument7 pages2019 Qi Et Al JCP Curvature MLRafael SalgadoNo ratings yet
- Kelompok 1. Object Detection in A Maritime Environment - CompressedDocument16 pagesKelompok 1. Object Detection in A Maritime Environment - CompressedRumah sakitNo ratings yet
- A Multi-Block Orthogonal Grid Generation Using Cad SystemDocument8 pagesA Multi-Block Orthogonal Grid Generation Using Cad SystemMohammad HaddadiNo ratings yet
- An Algorithm For Projecting Points Onto A Patched CAD Model: W. D. HenshawDocument9 pagesAn Algorithm For Projecting Points Onto A Patched CAD Model: W. D. HenshawDamjan IlievskiNo ratings yet
- Gm/idDocument10 pagesGm/idAmith NayakNo ratings yet
- Pavement Crack Detection and Classification Based On Fusion Feature of LBP and PCA With SVMDocument11 pagesPavement Crack Detection and Classification Based On Fusion Feature of LBP and PCA With SVMSebuah PesanNo ratings yet
- Learning Boundary Edges For 3d-Mesh Segmentation: (200y), Number Z, Pp. 1-12Document12 pagesLearning Boundary Edges For 3d-Mesh Segmentation: (200y), Number Z, Pp. 1-12Olabanji ShonibareNo ratings yet
- Crack Detection in Concrete Using Transfer LearningDocument12 pagesCrack Detection in Concrete Using Transfer LearningNugraha BintangNo ratings yet
- Design of Lattice Structures Using Local Relative Density Mapping MethodDocument9 pagesDesign of Lattice Structures Using Local Relative Density Mapping MethodGogyNo ratings yet
- An End-To-End Three-Dimensional Reconstruction Framework of Porous Media From A Single Two-Dimensional Image Based On Deep LearningDocument20 pagesAn End-To-End Three-Dimensional Reconstruction Framework of Porous Media From A Single Two-Dimensional Image Based On Deep Learningpcacais3No ratings yet
- Scatter Correction Method For Cone-Beam CT Based On Interlacing-Slit ScanDocument8 pagesScatter Correction Method For Cone-Beam CT Based On Interlacing-Slit ScanСергій СенчуровNo ratings yet
- A Method ForDocument9 pagesA Method ForC M shashikumarNo ratings yet
- Medical Physics - 2023 - Li - A Nonconvex Model Based Combined Geometric Calibration Scheme For Micro Cone Beam CT With - 230608 - 181849Document18 pagesMedical Physics - 2023 - Li - A Nonconvex Model Based Combined Geometric Calibration Scheme For Micro Cone Beam CT With - 230608 - 181849nnnnnhy72No ratings yet
- Manou FAIM2022Document8 pagesManou FAIM2022George VosniakosNo ratings yet
- Seismic Impedance Inversion Based On Cycle-Consistent GenerativeDocument15 pagesSeismic Impedance Inversion Based On Cycle-Consistent GenerativeSumeetMavaniNo ratings yet
- Machine Learning For High-Speed Corner Detection: July 2006Document15 pagesMachine Learning For High-Speed Corner Detection: July 2006Mamatgrab GamingNo ratings yet
- Fast Block Direction Prediction For Directional TransformsDocument8 pagesFast Block Direction Prediction For Directional TransformsCyberJournals MultidisciplinaryNo ratings yet
- Consistent Normal Orientation For Polygonal MeshesDocument9 pagesConsistent Normal Orientation For Polygonal MeshesRazer9788No ratings yet
- Computer Graphics Forum - 2006 - Gre - GPU Based Collision Detection For Deformable Parameterized SurfacesDocument10 pagesComputer Graphics Forum - 2006 - Gre - GPU Based Collision Detection For Deformable Parameterized Surfaceszxwx1111No ratings yet
- Innovations in T-Way Test Creation Based On A Hybrid Hill Climbing-Greedy AlgorithmDocument12 pagesInnovations in T-Way Test Creation Based On A Hybrid Hill Climbing-Greedy AlgorithmIAES IJAINo ratings yet
- 2009 AAMM LimiterDocument30 pages2009 AAMM LimiterweyumivalNo ratings yet
- EDGE-Net: Efficient Deep-Learning Gradients Extraction NetworkDocument15 pagesEDGE-Net: Efficient Deep-Learning Gradients Extraction NetworkAdam HansenNo ratings yet
- Title: Status: Purpose: Author(s) or Contact(s)Document4 pagesTitle: Status: Purpose: Author(s) or Contact(s)Shafayet UddinNo ratings yet
- Bouchard 2003Document22 pagesBouchard 2003Piyush AgarawalNo ratings yet
- Computers and Chemical Engineering: M.J. Baker, S. Daniels, P.G. Young, G.R. TaborDocument7 pagesComputers and Chemical Engineering: M.J. Baker, S. Daniels, P.G. Young, G.R. Taborremote controlNo ratings yet
- Adaptive DCVS for coal mine video using NBCDocument11 pagesAdaptive DCVS for coal mine video using NBCdev- ledumNo ratings yet
- Variance-Aware Multiple Importance Sampling 2019Document9 pagesVariance-Aware Multiple Importance Sampling 2019Ivan MandzhukovNo ratings yet
- Archivo 10Document11 pagesArchivo 10Sergio Andres Carrillo RuedaNo ratings yet
- A New Image Recognition and Classification Method Combining Transfer Learning Algorithm and MobileNet Model For Welding DefectsDocument10 pagesA New Image Recognition and Classification Method Combining Transfer Learning Algorithm and MobileNet Model For Welding DefectsThomas LiNo ratings yet
- A Genetic AlgorithmDocument7 pagesA Genetic Algorithmmm72600No ratings yet
- Optimal Sizing of CMOS Analog Circuits Using Gravitational Search Algorithm With Particle Swarm OptimizationDocument23 pagesOptimal Sizing of CMOS Analog Circuits Using Gravitational Search Algorithm With Particle Swarm OptimizationmohsenparsauniNo ratings yet
- Solving The Discretised Boltzmann Transport Equations Using Neural NetworksDocument33 pagesSolving The Discretised Boltzmann Transport Equations Using Neural NetworksAntonio Carlos Firmino JuniorNo ratings yet
- 13873959708837061Document18 pages13873959708837061Sachin GNo ratings yet
- sig23_shortest_pathDocument15 pagessig23_shortest_pathSachin GNo ratings yet
- jgt98deform_AABBDocument14 pagesjgt98deform_AABBSachin GNo ratings yet
- Collision Detection Shape RegularityDocument12 pagesCollision Detection Shape RegularitySachin GNo ratings yet
- ErinCatto DynamicBVH GDC2019Document89 pagesErinCatto DynamicBVH GDC2019Sachin GNo ratings yet
- Collision Detection Shape RegularityDocument12 pagesCollision Detection Shape RegularitySachin GNo ratings yet
- Class 9 NTSE-Maths: Answer The QuestionsDocument14 pagesClass 9 NTSE-Maths: Answer The QuestionsHarshit GargNo ratings yet
- Bored Pile Procedure Rev 2Document5 pagesBored Pile Procedure Rev 2Germar Porquerino100% (1)
- EvaporationDocument28 pagesEvaporationabishekmosesNo ratings yet
- Sig Figs, Math OpsDocument28 pagesSig Figs, Math OpsDon King EvangelistaNo ratings yet
- PML Basics PDFDocument90 pagesPML Basics PDFJorge Enrique Reyes SztayzelNo ratings yet
- Diff Shortening of Tall Steel Building Columns TaranathDocument8 pagesDiff Shortening of Tall Steel Building Columns TaranathgoggingsNo ratings yet
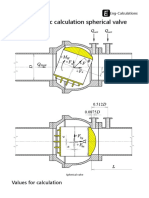
- Hydrodynamic Calculation Spherical ValveDocument34 pagesHydrodynamic Calculation Spherical ValveEng-CalculationsNo ratings yet
- Evaluation of SAR Reduction For Mobile Phone Using RF ShieldDocument5 pagesEvaluation of SAR Reduction For Mobile Phone Using RF ShieldsubuhpramonoNo ratings yet
- Iaetsd-Searl Effect PDFDocument7 pagesIaetsd-Searl Effect PDFiaetsdiaetsdNo ratings yet
- DemonstrationDocument10 pagesDemonstrationAbhiraj Singh ShekhawatNo ratings yet
- Applied Mathematics Demo PDFDocument157 pagesApplied Mathematics Demo PDFAbhishek Kumar AmarNo ratings yet
- MIS 373 Homework 3 Operations Management ProblemsDocument2 pagesMIS 373 Homework 3 Operations Management ProblemsjaneNo ratings yet
- Role of computers in streamlining product developmentDocument10 pagesRole of computers in streamlining product developmentssdeepthiNo ratings yet
- Single Stub MatchingDocument13 pagesSingle Stub MatchingHaya AlqahtaniNo ratings yet
- Java Placement QuestionsDocument18 pagesJava Placement QuestionsmeenakshiNo ratings yet
- RV-1 Flow DivDocument7 pagesRV-1 Flow Divturbo_kidNo ratings yet
- Visual guide to basic 3D shapesDocument10 pagesVisual guide to basic 3D shapesBel JaNo ratings yet
- Precedence Diagram Method PDFDocument35 pagesPrecedence Diagram Method PDFAhmad S Abdul AzizNo ratings yet
- STATEMENT ASE(3)Document2 pagesSTATEMENT ASE(3)dacianzNo ratings yet
- 1 Banach SpacesDocument41 pages1 Banach Spacesnuriyesan0% (1)
- Ijves Y14 05338Document5 pagesIjves Y14 05338SachinNo ratings yet
- SYMBOLIC REASONING UNDER UNCERTAINTYDocument16 pagesSYMBOLIC REASONING UNDER UNCERTAINTYSurya Kanta100% (2)
- Estimating and Verifying Soil Unit Weight Determined On The Basis of SCPTu TestsDocument11 pagesEstimating and Verifying Soil Unit Weight Determined On The Basis of SCPTu TestsHattori HanzoNo ratings yet
- Chapter (1) Heet SDocument7 pagesChapter (1) Heet SsaadNo ratings yet
- Work - Energy - PowerDocument9 pagesWork - Energy - PowermaryNo ratings yet
- Mechanical Vibration (Mamun Sir)Document52 pagesMechanical Vibration (Mamun Sir)Nahik KabirNo ratings yet
- Predict bank marketing success with new dataDocument2 pagesPredict bank marketing success with new dataMadhu EvuriNo ratings yet
- Lecture 36 - Single Stage Amplifier: Design For Specific GainDocument11 pagesLecture 36 - Single Stage Amplifier: Design For Specific GainKhaleef Khairul AnuarNo ratings yet
- Summative Test in General MathematicsDocument4 pagesSummative Test in General MathematicsSam SamNo ratings yet
- Financial Math Exam—April 2023Document8 pagesFinancial Math Exam—April 2023Orlan RodriguezNo ratings yet
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- Design Research Through Practice: From the Lab, Field, and ShowroomFrom EverandDesign Research Through Practice: From the Lab, Field, and ShowroomRating: 3 out of 5 stars3/5 (7)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.From EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.No ratings yet
- FreeCAD | Design Projects: Design advanced CAD models step by stepFrom EverandFreeCAD | Design Projects: Design advanced CAD models step by stepRating: 5 out of 5 stars5/5 (1)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- Contactless Vital Signs MonitoringFrom EverandContactless Vital Signs MonitoringWenjin WangNo ratings yet