You might also like
- 5 Spd. Automatic Transmission 01VDocument870 pages5 Spd. Automatic Transmission 01VNP100% (3)
- Demag DF 125 enDocument234 pagesDemag DF 125 enBaciu Nicolae50% (2)
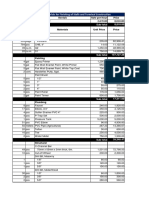
- 3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionDocument2 pages3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionKris Aileen CortezNo ratings yet
- Comparision of Fabrication TolerancesDocument4 pagesComparision of Fabrication TolerancesSatish Keskar100% (1)
- CAD-based Simulation of The Hobbing ProcessDocument11 pagesCAD-based Simulation of The Hobbing ProcessGabriel MariusNo ratings yet
- Developments of A Method For Lap Time SimulationDocument7 pagesDevelopments of A Method For Lap Time SimulationRodrigo Bob100% (1)
- Reverse Engineering of Pump Casing and ImpellerDocument12 pagesReverse Engineering of Pump Casing and ImpellerEmad BadrNo ratings yet
- Nissan RB Engine - WikipediaDocument60 pagesNissan RB Engine - WikipediaZedrick Nell100% (2)
- Types of Excitation SystemDocument13 pagesTypes of Excitation SystemRohit Akiwatkar33% (3)
- Setra 400 Class - 415 416 Euro 5 ManualDocument620 pagesSetra 400 Class - 415 416 Euro 5 ManualAshley Cardwell100% (3)
- Topic3 Ventilation Part 2Document51 pagesTopic3 Ventilation Part 2Anisha AdzihanNo ratings yet
- Documento GuiaDocument9 pagesDocumento GuiaStiNo ratings yet
- Ansys Turbo Machinery FlyerDocument2 pagesAnsys Turbo Machinery FlyermilanstrNo ratings yet
- Crankshaft DesignDocument8 pagesCrankshaft DesignDiego AvendañoNo ratings yet
- CamDocument9 pagesCamhemaf85No ratings yet
- 2017 Team Description Paper: UBC Thunderbots:, Dingqing Yang, and Zhikai ZhangDocument12 pages2017 Team Description Paper: UBC Thunderbots:, Dingqing Yang, and Zhikai ZhangChefiaNo ratings yet
- Advanced Computer Aided Design Simulation of GearDocument8 pagesAdvanced Computer Aided Design Simulation of GearRZW RNo ratings yet
- Adjustement Aspects of Gear Hobbing Machines in Diagonal MillingDocument5 pagesAdjustement Aspects of Gear Hobbing Machines in Diagonal MillingTrường Đỗ NgọcNo ratings yet
- Multibody Dynamics Model of The Cycloidal GearboxDocument9 pagesMultibody Dynamics Model of The Cycloidal GearboxgulipeiloNo ratings yet
- End-To-End Design and Optimization of The Principal Wheel of A Centrifugal Submersible PumpDocument5 pagesEnd-To-End Design and Optimization of The Principal Wheel of A Centrifugal Submersible PumpAbichou IssaNo ratings yet
- Research Paper On Grinding MachineDocument12 pagesResearch Paper On Grinding MachineValay PatelNo ratings yet
- Hashemian 2020Document12 pagesHashemian 2020lzq8306No ratings yet
- New Siemens Applications For Designing Bevel Gears: IOP Conference Series: Materials Science and EngineeringDocument9 pagesNew Siemens Applications For Designing Bevel Gears: IOP Conference Series: Materials Science and EngineeringPavansatya AdabalaNo ratings yet
- Air Compressor Screw Pair Profiling Based On An Advanced Envelope MethodDocument8 pagesAir Compressor Screw Pair Profiling Based On An Advanced Envelope MethodTJPRC PublicationsNo ratings yet
- Three-Phase Induction Motor Design SoftwareDocument4 pagesThree-Phase Induction Motor Design SoftwareAce TobikumaNo ratings yet
- jsw0605 21Document8 pagesjsw0605 21ranim najibNo ratings yet
- Modeling of Wheels and TiresDocument8 pagesModeling of Wheels and TireswhereareyoudearNo ratings yet
- Department of Mechanical EngineeringDocument17 pagesDepartment of Mechanical EngineeringDev AgarwalNo ratings yet
- Computer Aided Spur Gear Data Extraction Based On Image Processing TechniqueDocument12 pagesComputer Aided Spur Gear Data Extraction Based On Image Processing TechniqueAli AbbarNo ratings yet
- Considerations Regarding Cam Techniques For Robot MillingDocument6 pagesConsiderations Regarding Cam Techniques For Robot MillingErno HuszarNo ratings yet
- Synchronous Reluctance Motor: Design, Optimization and ValidationDocument6 pagesSynchronous Reluctance Motor: Design, Optimization and Validationmr. dossNo ratings yet
- Dontyne BrochureV5-1 WebDocument24 pagesDontyne BrochureV5-1 WebAdam FoltzNo ratings yet
- Rapid Meshing and Advanced Physical Modeling For Gasoline DI Engine ApplicationDocument7 pagesRapid Meshing and Advanced Physical Modeling For Gasoline DI Engine Applicationmina badratNo ratings yet
- BLDCDocument6 pagesBLDCtarib MunaibNo ratings yet
- Eccentric Shaft Ansys Analysis PDFDocument5 pagesEccentric Shaft Ansys Analysis PDFphilipjNo ratings yet
- Axial Flow Turbine Aerodynamic Shape DesignoptimizationDocument11 pagesAxial Flow Turbine Aerodynamic Shape Designoptimizationntik 23No ratings yet
- Design and CFD Analysis of Centrifugal PumpDocument11 pagesDesign and CFD Analysis of Centrifugal PumpIJRASETPublicationsNo ratings yet
- V6i5 1358Document6 pagesV6i5 1358Ritesh RajNo ratings yet
- Product Design of Electronic Parking BrakeDocument8 pagesProduct Design of Electronic Parking Brakeapi-3776728No ratings yet
- Comparative Study of Casting Simulation Packages Used in FoundriesDocument4 pagesComparative Study of Casting Simulation Packages Used in FoundriesPrasad AnandNo ratings yet
- Modelling and Simulation of A Ball Throwing MachineDocument7 pagesModelling and Simulation of A Ball Throwing Machinesamina.22110159No ratings yet
- CAD Design: Figure 0-1 Francis Turbine Runner Geometry As Function of The Specific Speed NsDocument10 pagesCAD Design: Figure 0-1 Francis Turbine Runner Geometry As Function of The Specific Speed Nsاسعد الماوريNo ratings yet
- Three-Wheel Full-Wheel Robot Speed AlgorithmDocument8 pagesThree-Wheel Full-Wheel Robot Speed AlgorithmVinh NguyenNo ratings yet
- A Study On Optimized Design of A Spur Gear Reduction UnitDocument7 pagesA Study On Optimized Design of A Spur Gear Reduction UnitSolomon Muhabaw MulatNo ratings yet
- Design and Analysis of Locomotive Wheel AxleDocument5 pagesDesign and Analysis of Locomotive Wheel AxleNIET Journal of Engineering & Technology(NIETJET)No ratings yet
- IMSD2018 Full Paper 206Document17 pagesIMSD2018 Full Paper 206Mahmoud KaramNo ratings yet
- Modelling, Simulation, and Implementing ROS For Autonomous Navigation of Tracked RobotDocument13 pagesModelling, Simulation, and Implementing ROS For Autonomous Navigation of Tracked RobotEditor IjasreNo ratings yet
- Recent Advances in Avl'S CFD Mesh Generation Software - Ese-ToolsDocument6 pagesRecent Advances in Avl'S CFD Mesh Generation Software - Ese-ToolsNhựt KhôiNo ratings yet
- Cad Cam - 22.12.15-1 PDFDocument87 pagesCad Cam - 22.12.15-1 PDFGuru MaheshNo ratings yet
- Multi Spindle GearboxDocument4 pagesMulti Spindle GearboxAkash Kumar DevNo ratings yet
- The Nonuniformity of The Piston Motion of The Radial Engine: June 2017Document10 pagesThe Nonuniformity of The Piston Motion of The Radial Engine: June 2017Sumit royNo ratings yet
- Design and Testing of Thrust Measurement System For Rotary EngineDocument9 pagesDesign and Testing of Thrust Measurement System For Rotary EnginePepito PerezNo ratings yet
- Design Analysis of Industrial Gear Box C 221013 042656Document5 pagesDesign Analysis of Industrial Gear Box C 221013 042656Trung ThanhNo ratings yet
- Detc2002/mech 34231Document10 pagesDetc2002/mech 34231kaesarNo ratings yet
- Progress Report 1Document10 pagesProgress Report 1saqibNo ratings yet
- Design and Analysis of Railway Casnub Bogie Using FemDocument5 pagesDesign and Analysis of Railway Casnub Bogie Using FemmiladNo ratings yet
- Irjet V7i3706Document6 pagesIrjet V7i3706smabhibidkar2001No ratings yet
- Recent Advances in The Analysis Spiral Bevel Gears: CurrentlyDocument10 pagesRecent Advances in The Analysis Spiral Bevel Gears: CurrentlyCAT MINING SHOVELNo ratings yet
- J. L. Chenot E. Onate Modelling of Metal Forming Processes, by Kluwer Academic PublishersDocument8 pagesJ. L. Chenot E. Onate Modelling of Metal Forming Processes, by Kluwer Academic Publishersmazen banatNo ratings yet
- Design Analysis of Industrial Gear Box Casing.: International Research Journal of Engineering and Technology (IRJET)Document5 pagesDesign Analysis of Industrial Gear Box Casing.: International Research Journal of Engineering and Technology (IRJET)Akash NandargiNo ratings yet
- Design and Analysis of Connecting Rods Usign Ansys Softwere 16.0Document13 pagesDesign and Analysis of Connecting Rods Usign Ansys Softwere 16.0ali danishNo ratings yet
- RM Bridge CONNECT Edition V11 Update 8 Release Notes (May 2020)Document21 pagesRM Bridge CONNECT Edition V11 Update 8 Release Notes (May 2020)Ave Robin M. RamosNo ratings yet
- Geometrically Accurate Computer 3D Models of GearDocument9 pagesGeometrically Accurate Computer 3D Models of GeareliretamozaNo ratings yet
- Emd Project 1Document15 pagesEmd Project 1Vaibhav KokitkarNo ratings yet
- BaierDocument7 pagesBaierJackson PhinniNo ratings yet
- 7 TransformadorDocument27 pages7 TransformadorMarkovic Ávila MartínezNo ratings yet
- About I-Beam Versus H-Beam Connecting Rod Design Using Inventor Autodesk 2018Document8 pagesAbout I-Beam Versus H-Beam Connecting Rod Design Using Inventor Autodesk 2018npatil_10No ratings yet
- Manufacturing Engineering II (ch3)Document93 pagesManufacturing Engineering II (ch3)beila.amu.22No ratings yet
- Activity1swot AnalysisDocument2 pagesActivity1swot AnalysisNatnael EliasNo ratings yet
- 05 Refine Sugar BoilingDocument43 pages05 Refine Sugar Boilingbeila.amu.22No ratings yet
- Material HandlingDocument9 pagesMaterial Handlingbeila.amu.22No ratings yet
- Chapter 4 VA NDocument22 pagesChapter 4 VA Nbeila.amu.22No ratings yet
- CH 4&5 MaintenanceDocument32 pagesCH 4&5 MaintenanceTewodros DereseNo ratings yet
- University of GondarDocument107 pagesUniversity of Gondaryared sitotaw100% (3)
- Solar Powered Water Pumping SystemsDocument6 pagesSolar Powered Water Pumping SystemsRyan SabidojrNo ratings yet
- CH 4Document14 pagesCH 4beila.amu.22No ratings yet
- CH 1Document32 pagesCH 1beila.amu.22No ratings yet
- Solar Powered Water Pumping SystemsDocument6 pagesSolar Powered Water Pumping SystemsRyan SabidojrNo ratings yet
- CH 3Document33 pagesCH 3beila.amu.22No ratings yet
- CH 2Document14 pagesCH 2beila.amu.22No ratings yet
- Chapter 4Document21 pagesChapter 4beila.amu.22No ratings yet
- CH2 - Heating System PDFDocument10 pagesCH2 - Heating System PDFAaron AngNo ratings yet
- Ngineering ATA: Topics in AcousticsDocument4 pagesNgineering ATA: Topics in AcousticsMohamed TahounNo ratings yet
- Cmae Prop 3Document3 pagesCmae Prop 3Mithun Kumar SandaNo ratings yet
- Twin Screw Compressor Performance and Its Relationship With RotorDocument7 pagesTwin Screw Compressor Performance and Its Relationship With RotorSaeedAkbarzadehNo ratings yet
- SID97-2B: Service Information DirectiveDocument26 pagesSID97-2B: Service Information Directivefranco lopezNo ratings yet
- Week 4 (Science)Document12 pagesWeek 4 (Science)Jeandro AgnesNo ratings yet
- Reliable Institute DPP of Maths Circles and ST LineDocument15 pagesReliable Institute DPP of Maths Circles and ST LinePrakhar BansalNo ratings yet
- Scheda Tecnica: IT-T1S Itb-T1SDocument1 pageScheda Tecnica: IT-T1S Itb-T1SITALFIL S.p.A.No ratings yet
- Mod9 - PROCESS HAZARDS AND SAFETY MEASURES IN EQUIPMENT DESIGN PDFDocument13 pagesMod9 - PROCESS HAZARDS AND SAFETY MEASURES IN EQUIPMENT DESIGN PDFDhanny MiharjaNo ratings yet
- 3 Tool Geometry: 3.1 Basic ConceptsDocument4 pages3 Tool Geometry: 3.1 Basic ConceptsHM DYNo ratings yet
- Conservation of MomentumDocument9 pagesConservation of MomentumStraight As StudyNo ratings yet
- IGCSE 13 Forces&MovementDocument26 pagesIGCSE 13 Forces&MovementHakim Abbas Ali PhalasiyaNo ratings yet
- A Review On Battery Thermal Management System of Electric VehicleDocument5 pagesA Review On Battery Thermal Management System of Electric VehiclePrafull ShindeNo ratings yet
- Compound CylinderDocument11 pagesCompound CylinderLiliana Ara GubanNo ratings yet
- Mfaf BK: ScopeDocument23 pagesMfaf BK: ScopesbalajimNo ratings yet
- 59 Why Nuts and Bolts Come Loose V1Document2 pages59 Why Nuts and Bolts Come Loose V1jillianixNo ratings yet
- Oxygen Cylinder 46.7 LTR (D Type - 200 CFT), Medical Oxygen Jumbo CylindersDocument2 pagesOxygen Cylinder 46.7 LTR (D Type - 200 CFT), Medical Oxygen Jumbo CylindersDebajyoti BarmanNo ratings yet
- Scania: Gearbox ModelsDocument4 pagesScania: Gearbox ModelsWilliam BernardinoNo ratings yet
- Aluminum Crane Systems 1110701Document32 pagesAluminum Crane Systems 1110701aidixon CAD designNo ratings yet
- Chapter 2Document27 pagesChapter 2hailegebreselassie24No ratings yet
- HS-2172 Vs HH 5500 Centrifuge ComparisonDocument10 pagesHS-2172 Vs HH 5500 Centrifuge ComparisonRicardo VillarNo ratings yet