0% found this document useful (0 votes)
160 views6 pagesDelta and Adaptive Delta Modulation
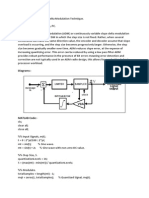
The document describes delta modulation and adaptive delta modulation techniques. Delta modulation uses a fixed step size, which can result in quantization errors for rapidly changing signals. Adaptive delta modulation adapts the step size based on input characteristics to prevent slope overload and quantization errors. Experiments showed adaptive delta modulation more accurately tracked input signals and reduced errors compared to delta modulation.
Uploaded by
abc abcCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
160 views6 pagesDelta and Adaptive Delta Modulation
The document describes delta modulation and adaptive delta modulation techniques. Delta modulation uses a fixed step size, which can result in quantization errors for rapidly changing signals. Adaptive delta modulation adapts the step size based on input characteristics to prevent slope overload and quantization errors. Experiments showed adaptive delta modulation more accurately tracked input signals and reduced errors compared to delta modulation.
Uploaded by
abc abcCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd