You might also like
- WGS-84 Extended Kalman Filter Radar Tracker ExampleDocument9 pagesWGS-84 Extended Kalman Filter Radar Tracker ExampleEric BechhoeferNo ratings yet
- Domaci Pedja: For For If End End EndDocument10 pagesDomaci Pedja: For For If End End EndМарко БулатовићNo ratings yet
- % Plotting The Given Question With CoordinatesDocument10 pages% Plotting The Given Question With CoordinatesNishan GajurelNo ratings yet
- % Plotting The Given Question With CoordinatesDocument10 pages% Plotting The Given Question With CoordinatesNishan GajurelNo ratings yet
- CT 303 Digital Communications Lab 9: Heer Gohil 201901135Document25 pagesCT 303 Digital Communications Lab 9: Heer Gohil 201901135H GNo ratings yet
- Eosc211 3Document5 pagesEosc211 3SamanthaNo ratings yet
- Matlab CompiledDocument34 pagesMatlab CompiledAyanNo ratings yet
- Effect of additional poles and zeroes on time responseDocument18 pagesEffect of additional poles and zeroes on time responseIzzah HzmhNo ratings yet
- Computational Fluid DynamicsDocument18 pagesComputational Fluid DynamicsRameshkumar RNo ratings yet
- Project ReportDocument19 pagesProject ReportAriel FariasNo ratings yet
- MatcodesDocument5 pagesMatcodesAcet AldehydeNo ratings yet
- EAS 3312 Aeroelasticity: Assignment 2Document18 pagesEAS 3312 Aeroelasticity: Assignment 2Rijal DinNo ratings yet
- Assign 6Document8 pagesAssign 6Suyog JadhavNo ratings yet
- THEORY OF MACHINES Presentation UpdatedDocument19 pagesTHEORY OF MACHINES Presentation UpdatedMuhammad Saud DarNo ratings yet
- Pump Week 2Document4 pagesPump Week 2Mahmoud MansourNo ratings yet
- Delta and Adaptive Delta ModulationDocument6 pagesDelta and Adaptive Delta Modulationabc abcNo ratings yet
- MatlabDocument25 pagesMatlabMuhammad TayyabNo ratings yet
- AMEEDocument30 pagesAMEEPravin SawantNo ratings yet
- MATLAB Numerical Methods Code ExamplesDocument23 pagesMATLAB Numerical Methods Code ExamplessrujanNo ratings yet
- CEIC3000 Assignment 3 - 1% amplitude oscillationsDocument8 pagesCEIC3000 Assignment 3 - 1% amplitude oscillationsHenry OkoyeNo ratings yet
- ASSIGNMENT3 CE23MTECH11029Document19 pagesASSIGNMENT3 CE23MTECH110292006 A.SaikumarNo ratings yet
- Simulation 112Document11 pagesSimulation 112sajalNo ratings yet
- ECG With BP Neural NetworkDocument24 pagesECG With BP Neural NetworkWaqar AhmedNo ratings yet
- Assignment 1Document8 pagesAssignment 1mostafaNo ratings yet
- Kim Minjung Bioen 485 Lab 3Document8 pagesKim Minjung Bioen 485 Lab 3api-281990237No ratings yet
- Le Système Non Linéaire Converge Vers Une Trajectoire Différente de Celle Désirait Cela Est Du Au Choix Arbitraire Du Point de La LinearizationDocument5 pagesLe Système Non Linéaire Converge Vers Une Trajectoire Différente de Celle Désirait Cela Est Du Au Choix Arbitraire Du Point de La Linearizationliza haddadNo ratings yet
- Matlab CodeDocument13 pagesMatlab CodeAvinash SinghNo ratings yet
- Final CSDocument28 pagesFinal CSkvbrothers2004No ratings yet
- Feedback and Control Systems Laboratory: ECEA107L/E02/2Q2021Document42 pagesFeedback and Control Systems Laboratory: ECEA107L/E02/2Q2021Kim Andre MacaraegNo ratings yet
- MATLAB SimulationDocument25 pagesMATLAB SimulationSaifullah KhalidNo ratings yet
- 17/04/23 22:08 C:/Users/coelh/Desktop/DINESTA... /A2 - E1.m 1 of 4Document4 pages17/04/23 22:08 C:/Users/coelh/Desktop/DINESTA... /A2 - E1.m 1 of 4DanielNo ratings yet
- Scilab code for Type 1 Eigen FIR filter designDocument7 pagesScilab code for Type 1 Eigen FIR filter designlakshmipriya94No ratings yet
- Various Equations (We May Not Need Any of These!) : Fs T Ut FDocument8 pagesVarious Equations (We May Not Need Any of These!) : Fs T Ut FLaura AndrewsNo ratings yet
- Matlab Programme in Ship DynamicsDocument4 pagesMatlab Programme in Ship Dynamicspramod1989No ratings yet
- Modelling MOS Devices Lab ReportDocument25 pagesModelling MOS Devices Lab ReportHimaja DasariNo ratings yet
- 8 Bài Tập Matlab: Họ và tên: Lương Văn Minh MSSV: 20152445Document34 pages8 Bài Tập Matlab: Họ và tên: Lương Văn Minh MSSV: 20152445HoàngHenryNo ratings yet
- UTM2LLDocument4 pagesUTM2LLIlyas KaoyNo ratings yet
- Fpga NotesDocument14 pagesFpga Notesdasan91No ratings yet
- SM CHDocument111 pagesSM CHJonathanNo ratings yet
- Heart FIGESDocument4 pagesHeart FIGESEsaNo ratings yet
- Short G: For EndDocument6 pagesShort G: For Endronald aseerNo ratings yet
- Gas PLDocument7 pagesGas PLAly Hassan WalyNo ratings yet
- Csypra3 Assignment 2 2020Document15 pagesCsypra3 Assignment 2 2020Tshepo Moloto100% (1)
- MATLAB Files (PDF)Document9 pagesMATLAB Files (PDF)Asad MeerNo ratings yet
- CT 303 Digital Communications Lab 9: Heer Gohil 201901135Document16 pagesCT 303 Digital Communications Lab 9: Heer Gohil 201901135H GNo ratings yet
- Tugas Pemrograman Komputer: "Program Matlab"Document21 pagesTugas Pemrograman Komputer: "Program Matlab"Erina RamadhaniNo ratings yet
- Assignment2_am56303Document20 pagesAssignment2_am56303Anuj SaidNo ratings yet
- Simulacion transformada ParkDocument7 pagesSimulacion transformada ParkMarcos EspinozaNo ratings yet
- 6 F 193483165 D 13 F 6255 ADocument15 pages6 F 193483165 D 13 F 6255 Aapi-616455436No ratings yet
- SVP_read_ADocument6 pagesSVP_read_AAhmad Nabil MaulanaNo ratings yet
- MATLAB Full Lab ReportDocument30 pagesMATLAB Full Lab ReportactuatorNo ratings yet
- Example From SlidesDocument17 pagesExample From SlidesShintaNo ratings yet
- Codificacion-en-Matlab IFN°3Document11 pagesCodificacion-en-Matlab IFN°3FernandoSerranoRamosNo ratings yet
- Spin Dynamics Study of 1D Heisenberg ModelDocument9 pagesSpin Dynamics Study of 1D Heisenberg Modelt_sairamNo ratings yet
- AE 342 Modelling and Analysis Lab Session 4 Simulating The Motion of Planar MechanismsDocument12 pagesAE 342 Modelling and Analysis Lab Session 4 Simulating The Motion of Planar Mechanismskrishna kumar mishraNo ratings yet
- State Feedback Controller Design: 1 The PlantDocument15 pagesState Feedback Controller Design: 1 The PlantRoberto BucherNo ratings yet
- Code MatlabDocument18 pagesCode Matlabvanlinh leNo ratings yet
- Deber 3Document9 pagesDeber 3Ale ZamNo ratings yet
- Stark William D 2020Document144 pagesStark William D 2020Nicolas AhumadaNo ratings yet
- Seismic Risk Assessment of Power Substations: Babak Omidvar, Ramin Azizi, Yasser AbdollahiDocument18 pagesSeismic Risk Assessment of Power Substations: Babak Omidvar, Ramin Azizi, Yasser AbdollahiNicolas AhumadaNo ratings yet
- Simulating The Seismic Performance of A Large-Scale Electric Network in The U.S. MidwestDocument13 pagesSimulating The Seismic Performance of A Large-Scale Electric Network in The U.S. MidwestNicolas AhumadaNo ratings yet
- T2 FemDocument1 pageT2 FemNicolas AhumadaNo ratings yet
- Infografías - Tarea 1Document11 pagesInfografías - Tarea 1Nicolas AhumadaNo ratings yet
- Half Marathon TrainingDocument3 pagesHalf Marathon Trainingmichaelmoore569No ratings yet
- What Is The Human Knot?Document1 pageWhat Is The Human Knot?nurul ain sofiaNo ratings yet
- Week 1 Week 2 Legs (Quad Focused)Document4 pagesWeek 1 Week 2 Legs (Quad Focused)Severi NurminenNo ratings yet
- FIVB-Volleyball Rules 2021 2024-ENDocument91 pagesFIVB-Volleyball Rules 2021 2024-ENbyMeexNo ratings yet
- M3E Gaining Grounds Season 2Document14 pagesM3E Gaining Grounds Season 2Gabriele Mambō LuccioniNo ratings yet
- How Football Began A GlobalDocument218 pagesHow Football Began A Globalybmm945No ratings yet
- NBA Agent DraftDocument33 pagesNBA Agent DraftAbner MicaelNo ratings yet
- Danica Dalmeida - AdidasDocument6 pagesDanica Dalmeida - AdidasDanica DalmeidaNo ratings yet
- Cheat Sheet Vol1Document7 pagesCheat Sheet Vol1belalkun08No ratings yet
- AMRAP 100 Warm-Up Routines Vol.1Document101 pagesAMRAP 100 Warm-Up Routines Vol.1Anonymous BEEeTPqiNo ratings yet
- Vdocuments - MX Lakai Footwear Spring 16Document61 pagesVdocuments - MX Lakai Footwear Spring 16Rodrigo DinizNo ratings yet
- THS Yearbook 1993Document88 pagesTHS Yearbook 1993Tiskilwa Historical SocietyNo ratings yet
- Usa Volleyball Indoor Rules FinalDocument268 pagesUsa Volleyball Indoor Rules FinalPanda CgNo ratings yet
- PE Project gr12Document15 pagesPE Project gr12Daivik NagarajNo ratings yet
- Course Syllabus School of EducationDocument6 pagesCourse Syllabus School of EducationJanine TupasiNo ratings yet
- Casagrand-Savoye Brochure PDFDocument76 pagesCasagrand-Savoye Brochure PDFSuganya AntonyNo ratings yet
- Pe Chapter 2 ReportDocument34 pagesPe Chapter 2 ReportMarian AntipoloNo ratings yet
- Physiological and Anthropometric Characteristics of Elite Women Rugby League PlayersDocument7 pagesPhysiological and Anthropometric Characteristics of Elite Women Rugby League PlayersJa JaliliNo ratings yet
- Book of The Stoeger X10, X20, X50 v1.0Document34 pagesBook of The Stoeger X10, X20, X50 v1.0Stephen Archer67% (3)
- Calisthenics Domination (Michal Kandrac) (Z-Library)Document40 pagesCalisthenics Domination (Michal Kandrac) (Z-Library)Tanito SantaNo ratings yet
- ARCH348 Practice 8Document4 pagesARCH348 Practice 8yooga palanisamyNo ratings yet
- Myferrari - Ferrari F8 Tributo - DSOrVGQDocument11 pagesMyferrari - Ferrari F8 Tributo - DSOrVGQemprendevNo ratings yet
- Full body workout with planks, lunges and crunchesDocument3 pagesFull body workout with planks, lunges and crunchesAayush TripathiNo ratings yet
- Smoke Signals pg.7Document1 pageSmoke Signals pg.7Farmer PublishingNo ratings yet
- P.Ed Practical - 1 BDocument5 pagesP.Ed Practical - 1 BLokeshNo ratings yet
- Ellaidhoo Dive, Watersports Price List 2023 - 2024Document4 pagesEllaidhoo Dive, Watersports Price List 2023 - 2024Andrei MagurianuNo ratings yet
- SVC Chaos MovesDocument14 pagesSVC Chaos MovesJosé Rodrigo Vieira DomingosNo ratings yet
- Fantasy Football Transfers Fantasy Premier LeagueDocument1 pageFantasy Football Transfers Fantasy Premier LeagueTondy RovaldyNo ratings yet
- Josh Bryant - Powerbuilding Cluster Sets (Croker2016)Document77 pagesJosh Bryant - Powerbuilding Cluster Sets (Croker2016)aaa100% (4)
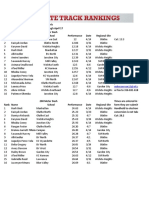
- 6A Girls Track Tracker - April 19, 2023Document17 pages6A Girls Track Tracker - April 19, 2023Catch it KansasNo ratings yet