Professional Documents
Culture Documents
Sensorless Position Control of Brushed DC Motor Using Ripple Counting Technique 00003049A
Uploaded by
Ali ErOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Sensorless Position Control of Brushed DC Motor Using Ripple Counting Technique 00003049A
Uploaded by
Ali ErCopyright:
Available Formats
AN3049
Sensorless Position Control of Brushed DC Motor Using
Ripple Counting Technique
Introduction
Author: Aldrin Abacan, Maria Loida Canada, Mike Gomez, Microchip Technology Inc.
Cost reduction has always been a factor considered when designing a control system, especially for
motor control applications. In DC motor control, sensors such as optical encoders, Hall effect sensors and
current sense transformers are used to identify speed and position, which increases the total number of
components, thus the overall system cost. To eliminate the use of such sensors, a drive technique such
as sensorless motor control that uses motor output voltage and current feedback is commonly used in
motor control drive.
Aside from the economic factor, the advantages of sensorless techniques include decreased
maintenance, a smaller number of fragile connections and easier miniaturization of the system. However,
one of the challenges with the implementation of sensorless techniques is software complexity, which can
be lessened by the MCU peripherals by handling other system processes.
This project aims to provide an alternative solution to the traditional and expensive methods of using
sensors to obtain and identify the motor position in precision control applications. Examples of such
applications can be found in car seat adjustments, mirror control, power windows and car flaps. Using
PIC® MCUs and Core Independent Peripherals (CIPs), the ripple counting technique based on the
current drawn by the motor, can be used. These CIPs are utilized to drive the motor with minimum CPU
intervention.
This application note describes three different Brushed DC (BDC) motor ripple counting solutions. Each
solution has utilized a particular PIC MCU device family. The first solution is a low-complexity position
control for a single BDC motor using a low-cost PIC18FXXQ10 device family, and external current filtering
and conditioning components. The second solution is a low-cost, single-chip capable of controlling two
motors nonsynchronously using the PIC16F177X device family. The third solution is a dual-simultaneous
BDC motor control using the PIC16F188XX device family. The BDC motor used in testing these solutions
is NIDEC COPAL MG16B-240-AB-00.
The three solutions described have the following key features:
• Full-Bridge Motor Control
• Bidirectional Motor Movement
• 5°-180° Configurable Angle Increment
• Motor Stall Detection and Recovery
• Overcurrent Detection for PIC16F177X
© 2019 Microchip Technology Inc. DS00003049A-page 1
AN3049
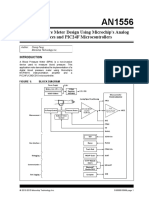
Figure 1. Block Diagram
Analog
Input for PIC18FXXQ10
Desired EEPROM
Angle RA0 Motor Supply
ADC
Forward
Button RB4
RB0 CWGA
PWM1
Reverse RC5
Button RD1 CWGB FULL-
BRIDGE BDC
RB1 CWG RD2 DRIVER MOTOR
Home CWGC CIRCUIT
Button Motor Forward/
FIRMWARE Reverse Motion
(Ripple Counter/ RD3 CWGD
Endpoint RB2 Motor Positioning)
Button
HLT Shutdown
Signal
RC6 CCP
EUSART
Current
Monitor RSENSE
RA2 Op Amp
TIMER1 CLC C1
Ref
Figure 1 shows the block diagram of the ripple counting system based on PIC18FXXQ10. The
PIC18FXXQ10 devices are inexpensive, robust and general purpose, making them suitable for this
application. This solution uses CIPs to control the motor.
The CIPs used in the design are: Complementary Waveform Generator (CWG), Hardware Limit Timer
(HLT) and Configurable Logic Cell (CLC). Integrating CIPs with other on-chip peripherals such as Pulse-
Width Modulation (PWM), Analog-to-Digital Converter (ADC), Capture, Compare and PWM (CCP) and
timers give the system the capacity to be fully functional.
© 2019 Microchip Technology Inc. DS00003049A-page 2
AN3049
Table of Contents
Introduction......................................................................................................................1
1. Sensorless Method of BDC Motor Control................................................................ 5
1.1. Brushed DC Motor Current Ripple............................................................................................... 6
1.2. PWM Effects on the Ripple.......................................................................................................... 9
2. Ripple to Pulse Conversion..................................................................................... 10
2.1. Current Sensing Stage............................................................................................................... 11
2.2. Signal Conditioning Stage A.......................................................................................................12
2.3. Signal Conditioning Stage B.......................................................................................................13
2.4. Comparator Stage...................................................................................................................... 16
3. Ripple Counting Solutions....................................................................................... 17
3.1. PIC18FXXQ10 Solution..............................................................................................................17
3.2. PIC16F177X Solution.................................................................................................................22
3.3. PIC16F188XX Solution.............................................................................................................. 27
4. Motor Safety Features............................................................................................. 31
4.1. Motor Stall Detection.................................................................................................................. 31
4.2. Overcurrent Detection................................................................................................................ 32
5. Ripple Counting Performance................................................................................. 33
6. Conclusion...............................................................................................................36
7. Appendix A: Circuit Schematic................................................................................ 37
8. Appendix B: MPLAB® Code Configuration (MCC) Peripheral Initialization............. 40
8.1. PIC18FXXQ10 Solution MCC Initialization.................................................................................40
8.2. PIC16F177X Solution MCC Initialization....................................................................................42
8.3. PIC16F188XX Solution MCC Initialization................................................................................. 44
9. Appendix C: Source Code Listing............................................................................46
The Microchip Web Site................................................................................................ 47
Customer Change Notification Service..........................................................................47
Customer Support......................................................................................................... 47
Microchip Devices Code Protection Feature................................................................. 47
Legal Notice...................................................................................................................48
Trademarks................................................................................................................... 48
Quality Management System Certified by DNV.............................................................49
© 2019 Microchip Technology Inc. DS00003049A-page 3
AN3049
Worldwide Sales and Service........................................................................................50
© 2019 Microchip Technology Inc. DS00003049A-page 4
AN3049
Sensorless Method of BDC Motor Control
1. Sensorless Method of BDC Motor Control
The sensorless motor control is a type of drive technique that does not rely on sensors to determine the
actual motor position or speed. It determines the position of the motor based on electrical parameters
such as Back-EMF or motor current feedback, which is present during the motor run-time.
The current feedback is used for circuit protection, motor speed estimation or position control. The motor
current can be monitored by placing a current sense resistor in a series with the motor. Using a current
sense amplifier tapped on the resistor terminals, the current detected is converted to a measurable
voltage that acts as a position or speed feedback signal to a closed-loop motor control. In this application,
the periodic variations in current feedback, due to BDC motor electro-mechanical construction, are
observed.
The displacement taken by the motor rotation can be identified by counting the number of those periodic
variations during motor operation. The method of using motor current feedback to determine motor
position and speed is referred to as the ripple counting technique and will be discussed and utilized in this
application note. The periodic variations in a current feedback are shown in Figure 1-1.
Figure 1-1. Periodic Variation in a Current Feedback
Variations
Figure 1-2. Current Sense Configuration
VMOTOR
VMOTOR
+
- VOUT VMOTOR
M M M
+
-
VOUT
- VOUT
(a) HIGH-SIDE CURRENT SENSE (b) LOW-SIDE CURRENT SENSE (c) BRIDGE-ORIENTED
CURRENT SENSE
© 2019 Microchip Technology Inc. DS00003049A-page 5
AN3049
Sensorless Method of BDC Motor Control
The ripple counting technique primarily depends on the motor current feedback to implement a
sensorless drive. Different current sense configurations based on sensing resistor placement can be used
to monitor current feedback and are shown in Figure 1-2.
High-side current sensing and bridge-oriented current sensing shown in Figure 1-2 (b) and Figure 1-2 (c)
respectively, are commonly used for functional safety requirements. Though proven effective, these
configurations require a high-end current sense amplifier with high Common-mode voltage and more
complex circuitry, which is not ideal for this application.
The current sensing configuration where the current sense resistor is placed between the motor and the
ground, as shown in Figure 1-2 (a), is referred to as low-side current sensing. It has the simplest and
most cost-effective implementation of the sensing configurations based on amplifier selection and circuit
complexity. The average voltage in the sensing resistor is near zero since it is ground referenced. It does
not require high-input Common-mode voltage, making it easier to select devices for its design and
implementation. It is also immune to voltage spikes or surges, which makes it suitable for high-voltage
motor applications.
Low-side current sensing has its own limitations. The placement of the current sense resistor causes the
load not to be ground referenced. The resistance introduced by the sensing elevates the low side of the
load several millivolts above the ground. Without ground reference, the short circuit between load and
ground cannot be detected. Despite this disadvantage, it is still a good choice for the ripple counting
application because its simplicity and load are not required to be ground referenced. The current sensing
method will be discussed later in the subsequent sections.
1.1 Brushed DC Motor Current Ripple
There are several types of ripple in a spinning motor. They can be classified as torque ripple, speed ripple
and current ripple. The torque ripple is characterized by undesirable variation of torque production during
shaft revolution, preventing smooth motor rotation and is observable mostly in Low-Frequency mode. The
speed ripples, also known as speed fluctuations, are induced by parasitic torque pulsations that vary
periodically with rotor position.
The current ripple is produced during motor rotation and defined as the low-amplitude current alternation,
riding on the DC voltage supply. This current ripple is a periodic variation in current created by the rotor
movement when it connects and disconnects rotor coils to the power supply via the brushes. The
produced current ripple gives an insight about the commutation process happening in a BDC motor.
Figure 1-3 shows how a three-commutator segment motor rotates and how the rotation produces current
ripples or commutator spikes.
© 2019 Microchip Technology Inc. DS00003049A-page 6
AN3049
Sensorless Method of BDC Motor Control
Figure 1-3. Ripple Production from a Rotating Motor
DC Component
1 Mechanical
Revolution
AC Component
Brush 1 V+ V+
Coil 1 Coil 1 Coil 1'
Coil 1'
Coil 3'
Branch 2 Branch 1 i1
i2 Branch 1
Coil 3 i2 i1 Coil 3'
Coil 2
Commutator Coil 2 Branch 2
Segment
Coil 2' Coil 3 Coil 2'
Brush 2 V- V-
a) b)
V+
Coil 1'
Coil 1
Coil 2
i2 Branch 1
Branch 2
i1 Coil 2'
Coil 3'
Coil 3
V-
a) b) c)
c)
When the BDC motor is turning, the brushes short-out adjacent commutator segments that result in a
current circulating between the segments. This causes the Back-EMF of the commutator segments to be
shorted out, thus producing short duration high-voltage pulses on the motor terminals. The high-voltage
pulses lower the impedance of the armature, thus causing the overall current to rise and generate a
© 2019 Microchip Technology Inc. DS00003049A-page 7
AN3049
Sensorless Method of BDC Motor Control
current ripple. The periodic shifting of a brush from one coil to another produces a periodic current ripple.
Also, it can be observed that the ripple waveforms are different from each other.
As shown in Figure 1-3, when the signal coming from a rotating motor is displayed on a measuring
instrument, the DC component will be immediately observed. The AC component or current ripple will
only be seen when this DC component is closely examined. The rotating direction of the DC motor in
Figure 1-3 is assumed as counterclockwise as indicated by the black arrow inside Figure 1-3 (a). Brush 1
is connected to a positive supply and Brush 2 is connected to a negative supply. The branch circuit 1,
which is composed of Coil 1 and Coil 2, has current flow in a clockwise direction from Brush 1 to Brush 2
as indicated by the red arrow. Meanwhile, the branch circuit 2, which is composed of Coil 3, has a
counterclockwise current flow from Brush 1 to Brush 2. The flowing current occurred on Branch 1 is
defined as i1, while the flowing current on Branch 2 is defined as i2. The total current of the DC motor
follows the Kirchhoff’s current law, i=i1 + i2.
At the moment when Coil 1 aligns with Brush 1 as shown in Figure 1-3 (b), it will make the voltage across
Branch 1 decrease because the branch is only composed of Coil 2. Since the supply voltage across the
two brushes is always kept constant, the shorting out of Coil 1 will suddenly increase the current value in
Branch 1, while the current in Branch 2 stays the same. The effect will be the total current flowing into the
DC motor, which will rapidly increase.
After the sudden shorting out, the next event is shown in Figure 1-3-c). Branch 1 will only be composed of
Coil 2 while Branch 2 will be composed of Coil 1 and Coil 3. The current flow direction in Coil 2 stays the
same as well as the voltage across it. Meanwhile, the current value in Branch 2 abruptly decreases when
the process of commutation ends. In this manner, the current ripple is produced as shown in the lower left
corner of Figure 1-3, with a single ripple waveform subdivided into sections to reflect what is happening
during the commutation process from Figure 1-3 (a) to (c).
The succeeding ripples are created by the same process of coil and brush contact. Note that each coil
must touch the two brushes to complete a rotation. Furthermore, every coil and brush contact produces a
distinct ripple waveform. The reason behind this is that coils are constructed differently, and the brushes
of the motor are also different from each other.
The number of brushes and commutator poles are fixed in a specific motor. This is why the number of
ripples in a complete rotation is constant. The ripple repeats in every rotation and the number of ripples
per revolution can be calculated using the equation below.
Equation 1-1. Number of Ripples per Revolution
��.������������ = ����ℎ � �����������������
When dealing with a geared motor, the equation above will be multiplied by the gear ratio to get the
number of ripples per revolution. The equation below shows the calculation of ripple in a geared motor.
Equation 1-2. Number of Ripples per Revolution Using Geared Motor
��.������������ = ����ℎ � ����������������� * ���������
Knowing the number of ripples in a single rotation is important to determine the total number of ripples
needed to rotate a certain degree of an angle. Applying Equation 1-1 in the example in Figure 1-3 can be
used to calculate that six ripples are produced in a single revolution of three-commutator poles with two
brushes. The current ripples need to be filtered, conditioned and converted to logic level series of rising
and falling edges in order to be countable by an MCU.
© 2019 Microchip Technology Inc. DS00003049A-page 8
AN3049
Sensorless Method of BDC Motor Control
1.2 PWM Effects on the Ripple
The simplest way to control the speed of a BDC motor is by controlling its supply voltage. The higher the
voltage, the higher the resulting speed of the motor. The PWM on the low-side MOSFET of the full-bridge
driver is used in many DC motor speed control applications. The ratio of ‘ON’ and ‘OFF’ time determines
the motor speed.
Since the current ripple is characterized by a low amplitude, high-frequency periodic signal, any
modulation that periodically changes the driving voltage causes the system not to clearly recognize the
ripple or lower its signal integrity. Figure 1-4 shows the ripple produced by different PWM speed
modulations. The PWM speed modulation affects the visibility of the ripple depending on the degree of
modulation. Since this solution focuses on precision control applications, the speed modulation is set at
100% modulation.
Figure 1-4. Ripples Produced at Different PWM Duty Cycles
Ripples produced at 80% PWM
Ripples produced at 90% PWM
Ripples produced at 100% PWM
© 2019 Microchip Technology Inc. DS00003049A-page 9
AN3049
Ripple to Pulse Conversion
2. Ripple to Pulse Conversion
To effectively count and convert current ripple into PIC MCU readable pulses, the current flowing through
the BDC motor undergoes various signal conditioning and filtering stages. Chronologically, the stages
are: current sensing stage, band-pass filter stage, differential amplifier stage and the comparator stage.
Figure 2-1 illustrates the output signals of each ripple conversion stage from the raw current signal up to
the digital pulses that will be used as an input to PIC MCUs.
Figure 2-1. Ripple Conversion Stages Output Signals
Motor
Current Sensing Signal Conditioning Signal Conditioning Comparator To PIC®
Current Stage Stage A Stage B Stage
Signal MCU
Signal amplification is needed in the first three stages since the current signal is too small to be detected
by the comparator. Depending on the solution, the signal conditioning stages and comparator stage can
be external or internal with respect to the PIC MCU family used.
All passive components and amplifiers are powered by a 5V supply. For the external-based filtering
solutions (PIC16F188XX and PIC18FXXQ10), MCP6024, a quad in the package operational amplifier (op
amp) integrated circuit, is used. It features a wide bandwidth (10 MHz) and low noise feature that are
suitable for small signal processes. For the comparator stage, an MCP6541, a push-pull output sub-
microamp comparator is used. While PIC16F177X promotes a cheap single-chip solution, PIC18FXXQ10
promotes a simple and flexible solution where the signal conditioning and comparator stage are external.
The output of the current sense is fed to the microcontroller for the signal conditioning. The internal op
amp peripheral has a 2 MHz gain bandwidth product and an open loop voltage gain of 90 db. It also
operates from 0V to VDD, which is 5V in this application. By utilizing these peripherals, the Bill of Materials
(BOM) costs for hardware designs, size and system noise can be reduced. The external current sensing
stage was designed using MCP6022. For a more detailed schematic diagram, refer to 7. Appendix A:
Circuit Schematic.
© 2019 Microchip Technology Inc. DS00003049A-page 10
AN3049
Ripple to Pulse Conversion
2.1 Current Sensing Stage
Since the application requires a simple and cost-effective implementation, the low-side current sense
configuration is used in this application. The current through the bridge driver is detected by tapping a
differential amplifier across the terminals of the current sense resistor R1, which is placed before the
ground as shown in Figure 2-2.
The current sense resistor at the low-side of the driver allows ripple conversion to operate bidirectionally
since the current flow direction will not change when triggered. If the current sense resistor is placed
within the load terminals of a bridge configuration, a more complex and more expensive circuit
configuration is required.
Figure 2-2. Current Sense Amplifier Configuration
VREF
FROM
MOSFET
BRIDGE
R16
R9 R7
+
C5 + R4
R1
IM
VOUT
(RSENSE)
R6 ‐
‐ C4
R8
R5
The value of R1 depends on the maximum current that could flow throughout the bridge. In this design,
the current is not expected to exceed 5A. The value of the current sense resistor can be calculated using
Equation 2-1. Another consideration when picking the right resistor is its power rating, which also
determines the package size. For this application, a 2W resistor with a 2512 package size is chosen.
Equation 2-1. Current Sense Resistor Value
��� − ����
������ =
�max * ��
© 2019 Microchip Technology Inc. DS00003049A-page 11
AN3049
Ripple to Pulse Conversion
Figure 2-3. Voltage Reference Configuration
5V
R14
‐
V REF
+
C6 R13
Aside from the current sense amplifier, the configuration for the current sense voltage biasing is needed.
Since all stages use a single supply operational amplifier, this is more susceptible to saturation during the
negative signal swing. It might cause clipping that will affect the original signal. Figure 2-3 shows a stable
voltage bias, with VREF established by using a unity gain configuration op amp fed by a voltage divider. To
obtain the maximum voltage signal swing allowed before saturation, the VREF is centered between the
voltage source and the ground. VREF is set at 2.5V on all succeeding stages.
The current that flows through the current sense resistor is so small that it requires high-gain
amplification. Because of this, the gain is set to 110V/V. The VOUT can be solved using the equation
below.
Equation 2-2. Current Sense Resistor Value
���� = ���� + � * ������ * ��
2.2 Signal Conditioning Stage A
After the current sensing stage, the signal will undergo in a two-stage signal conditioning. The first signal
conditioning stage is implemented using an active band-pass filter. Figure 2-4 shows the band-pass filter
configuration used in this application. This stage is used to eliminate the DC component of the signal and
the added external noise from the previous stage. It is also designed to allow frequency within
approximately 100 Hz to 1500 Hz, which is based on the ripple frequency range. The ripple frequency
can be identified by the number of commutator poles, gear ratio and the rated speed of the motor as
shown in Equation 2-3. Different rated speeds of different motors affect the frequency range to be set.
Equation 2-4 shows the gain and cut-off frequencies calculation of the band-pass filter. The desired gain
is calculated by R2 and R3 depending on the maximum voltage swing before the op amp saturation. C2
and C3 capacitors can be calculated using the resistor values selected and frequency range. An inverting
amplifier topology is used to retain the biasing from the previous stage to the next stage of ripple
conversion.
© 2019 Microchip Technology Inc. DS00003049A-page 12
AN3049
Ripple to Pulse Conversion
Figure 2-4. Band-Pass Filter Configuration
C3
R3
C2 R2
IM ‐ To Signal
Conditioning B
V REF
Equation 2-3. Ripple Frequency
��� * ��������� * ��.�������
������� =
30
40��� * 240 * 3
Ex: 960 Hz =
30
Equation 2-4. Band-Pass High and Low Cut-Off Frequency and Gain
1 1 �3
��1 = ��2 = �1 =
2��2�2 2��3�3 �2
1
Ex: 106.39 Hz = ;
2� 220�٠6.8��
1 1.5�Ω
1560.34 Hz = ; 6.8 =
2� 1.5�Ω 68�� 220�Ω
2.3 Signal Conditioning Stage B
The output of the active band-pass filter provides a clean amplified AC signal that is biased along the
reference voltage. This allows the comparator to detect ripples and convert it to pulse with a frequency
equal to the current ripple frequency. Although the output is a clean amplified AC signal, an initial current
spike that is further discussed in this section has not been filtered out during this process. This condition
leads to the addition of another signal conditioning stage while maintaining the proper biasing for the
comparator.
© 2019 Microchip Technology Inc. DS00003049A-page 13
AN3049
Ripple to Pulse Conversion
Figure 2-5. Inrush Current on Previous Stages
Inrush
Current
During motor start-up, motor windings behave as a low-resistance closed circuit causing the system to
draw a large amount of current. This large amount of current during motor start-up is referred as the
inrush current. It refers to the electrical current usually flowing through the motor in fractions of a second
after the motor’s power is turned on. In this brief time interval, the current rapidly increases and
decreases to its steady state as the motor begins to rotate.
Figure 2-5 illustrates the current produced during motor start-up. This current spike is too large and too
slow not to be filtered out by the previous stage. In addition, the high pass part of the band-pass filter has
been set to 100 Hz at the previous stage. This configuration produces a fairly large time constant that
prohibits the DC signal components to stabilize quickly.
Since the motor is already running and generating ripple at this point, this causes the comparator to miss
those start-up ripples. The blue and green signals in Figure 2-5 represent the current sense stage and
band-pass filter stage, respectively. Failure to detect and convert the start-up ripple current into
comparator pulses will result in a missed pulse and inaccuracy on the ripple count. The problem about
the start-up current ripple is addressed by using a differential amplifier stage for the second signal
conditioning stage.
© 2019 Microchip Technology Inc. DS00003049A-page 14
AN3049
Ripple to Pulse Conversion
Figure 2-6. Differential Amplifier Configuration
R15
R11
Band-pass ‐
RIPPLE
Filter
Output +
R17
C9 R4
VREF
At this stage, the output of the band-pass filter is fed to both the positive and negative inputs of a
differential amplifier with a capacitor (C9) and tapped in the positive input as shown in Figure 2-6. This
capacitor acts as a low-pass filter that introduces a small amount of delay with respect to the original
signal. This delay highly affects the output of the differential amplifier since the common voltage between
inputs are being negated. The effect of the high-current spike is eliminated while retaining the ripple
frequency component. The signal is amplified with a differential gain of approximately 68V/V for wide
signal swing and rebiased at 2.5V for the comparator stage.
Figure 2-7. Digital Pulse Conversion with/without Differential Amplifier as Input
Figure 2-7 illustrates the difference between the comparator outputs when the differential amplifier output
is used or not. If the band-pass filter is used as input for the comparator, the initial ripples might not be
converted to pulses because of the inrush current. The greater and faster the change in the amplitude
during the start-up, the greater the possibility of a missed pulse. The differential amplifier solves this
issue.
© 2019 Microchip Technology Inc. DS00003049A-page 15
AN3049
Ripple to Pulse Conversion
2.4 Comparator Stage
This stage follows an inverting hysteresis topology that generates an output of either 0 or 5V signal
pulses. These output pulses are used as an input to the counting algorithm of the firmware. The
comparator hysteresis function moves the threshold level up or down with respect to the input signal. This
prevents the output pulse from oscillating and avoids switching noise during level transition caused by
small amounts of parasitic feedback.
The reference voltage used on the comparator depends on the behavior of the signal. Since different
motors have different current rating and brush construction, the reference voltage signal varies depending
on the motor used. Typically, the reference is set near the center, between the voltage source and the
ground. The voltage reference can be configured using a voltage divider tapped to a feedback resistor.
This determines the high and low voltage threshold the comparator will accept. Figure 2-8 shows the
comparator circuit with hysteresis using MCP6541. For the PIC16F177X solutions, the internal
comparator peripheral is utilized.
Figure 2-8. Comparator Stage Schematic
RIPPLE
PULSE
5V +
R18
R19 R20
The value of the voltage thresholds depends on the values of the resistor applied. For the calculation of
VTL and VTH, refer to Equation 2-5. R18 and R19 are set similarly since VTL and VTH are centered at VREF
as well.
Equation 2-5. Voltage Threshold Range
R19R20 VCC R19R18 VOL
VTL = +
R19 + R20 R19R20 R19 + R18 R19R18
R19 + R20
+ R18 R19 + R18
+ R20
R19R20 VCC R19R20 VHL
VTH = +
R19 + R20 R19R20 R19 + R18 R19R18
R19 + R20
+ R18 R19 + R18
+ R20
© 2019 Microchip Technology Inc. DS00003049A-page 16
AN3049
Ripple Counting Solutions
3. Ripple Counting Solutions
The previous section introduced the method of converting current ripple into readable pulses by either the
external comparator or the PIC MCU’s comparator module. The next step is to count these converted
ripples and to learn how these ripples are processed using the PIC MCU. Three ripple counting solutions
using PIC MCU families will be discussed thoroughly in this section. Each of these solutions offer different
pros and cons; the user will decide which solution best fits their design.
3.1 PIC18FXXQ10 Solution
This solution gives flexibility to the user to choose the desired current filtering and conditioning
components. The value of the external components can be easily adjusted to suit the motor specifications
for the accurate conversion of ripples to digital pulses. The PIC MCU is used to count the digital pulses
and translate the number of pulses into equivalent motor positions. Furthermore, the use of a PIC MCU in
a solution gives better performance due to added intelligence in the system.
3.1.1 PIC18FXXQ10 Ripple Counting Implementation
The counting implementation is achieved through the integration of firmware and peripherals. The
firmware commands to initiate the drive and to start the counting of pulses. It also facilitates the recording
and storage of the motor’s position in the memory. On the other hand, the peripherals carry out the
counting of pulses and their comparison to the expected number of ripples that are initialized in the
beginning.
Figure 3-1. PIC18FXXQ10 Control Diagram
Input References Motor Drive
Four Input Buttons
4 Firmware PWM
Calculation for
Analog Input From Expected Ripple FULL-
Potentiometer Count and Full‐ BRIDGE
Desired 5‐180 ° Bridge DRIVER
BDC
Direction Control
Angle Signal CIRCUIT MOTOR
Expected CWG
Ripple Count
Firmware
Retrieval of CCP Driver
Actual Ripple Shutdown
Count Verified Peripheral Signal
Ripple Count
Actual Fault
Ripple
Count Detection
TIMER1 Motor Stall Signal
EUSART Counting
Ripple Counting
3.1.2 Input References
Figure 3-1 shows the complete signal flow in the system. The solution is designed with an analog
potentiometer for selecting the desired angle and four buttons for the motor direction control as an input
to the system. Two buttons were assigned per direction. In the forward direction, one button is for a
normal incremental movement and another button is for moving to the endpoint, while in the reverse
direction, there is a button for normal movement and another one for going back to home position. The
© 2019 Microchip Technology Inc. DS00003049A-page 17
AN3049
Ripple Counting Solutions
range of the incremental angle that the system can handle effectively is from 5° to 180° with 5° increment
per potentiometer adjustment. The input angle is processed by the firmware and undergoes a series of
calculations using equations.
Equations were developed for calculating the needed parameters in the firmware depending on the given
motor specification. Motors may differ in the number of commutator poles and gear ratio. Equation 3-1 is
developed to determine the number of ripples per degree in the movement of a geared motor. Meanwhile,
Equation 3-2 is used to calculate the expected number of ripples to rotate a certain degree of an angle.
Lastly, the compare load value in Equation 3-3 computes the value to be loaded into the CCP peripheral
where the TIMER1 register data will be continuously compared to determine if the target position has
been reached.
Equation 3-1. Ripple Count per Angle
����_����� * ����������_�������
������������������� =
180°
Equation 3-2. Expected Ripple Count
������������������� = ������������ * �������������������
Equation 3-3. Compare Load Value
���������������� = ������������������� − �����������_����� > > 1
+ �������_�����_�����
3.1.3 Motor Drive Signal
The PWM generates a full-bridge signal with 100% duty cycle to supply the CWG. The PWM is set to
100% duty cycle, since this application does not require the modulation of the motor speed. The PWM
signal is directed by the CWG peripheral to its specific channels depending on the chosen CWG mode.
The CWG has the capacity to drive the motor in forward and reverse directions, which enables the motor
to be driven bidirectionally. The signal coming from the CWG controls the full-bridge driver circuit, which
accomplishes the actual driving of the motor. For the complete discussion of this peripheral operation,
refer to TB3118: Complementary Waveform Generator. Aside from driving using CWG, if the device has
no CWG, the user can also use the CLC peripheral for creating a combination of signals from the PWM
output to drive the motor bidirectionally. When the motor is already spinning, it is the right time to control
its position and dictate when to stop it. This will be discussed further in the next section.
3.1.4 Counting the Current Ripple
The counting implementation is achieved through the integration of firmware and peripherals. The
firmware commands to initiate the drive and to start the counting of pulses. The conditioned ripple enters
the PIC MCU and is fed to the TIMER1 peripheral.
3.1.5 Timer1 Configuration
The TIMER1 peripheral is a 16-bit timer/counter that can be configured in different modes. To learn more
about the function of the TIMER1 peripheral refer to the discussion of TIMER1 in the device data sheet.
This application used the TIMER1 module in Gate Toggle mode. The TIMER1 module is set to capture
data every high pulse of the signal. The diagram in Figure 3-2 illustrates the operation of TIMER1 in this
application.
© 2019 Microchip Technology Inc. DS00003049A-page 18
AN3049
Ripple Counting Solutions
Figure 3-2. Timer1 Diagram
TMR1GE
T1GPOL
T1GTM
TMR1 Gate Input/
Ripple Pulse
T1CKI/
Ripple Pulse
T1GVAL
TMR1 Register
N N+1 N+2 N+3
Value
The input to the TMR1 gate and to the TIMER1 clock source is the same because the pulses counted will
come from the clock source and the indicator that needs to be captured is rendered by the pulses coming
from the gate. In the first full-cycle of gate signal, the TxGVAL value goes high and low to the succeeding
full-cycle of the ripple signal. If this happens alternately, the two ripples of the original signal will be
equivalent only to a full cycle of TxGVAL.
Only when TxGVAL is high the TIMER1 increments its register value, and whenever TxGVAL is low the
TIMER1 register holds the value accumulated previously. In this way, two ripples are reduced into a single
pulse in which the TIMER1 register value counts. That is the reason why during the setting of
compareLoadValue in Equation 3-3 it is shifted once to the right to resemble that the expected number of
ripples is divided into half. The initial value loaded to the TMR1 register is equivalent to half of its
maximum for a wider range of the desired angle that the TIMER1 can accommodate. The TIMER1 counts
the number of ripples, but without any position indicator it will not be known if the desired position has
been reached. The CCP peripheral serves as an indicator when the position is reached.
3.1.6 CCP Operation
The Capture/Compare/PWM module is a peripheral that allows the user to time and control different
events, and to generate PWM signals. This application uses this peripheral in Compare mode, which
allows the user to trigger an event after a predetermined amount of time has expired. TIMER1 is the
chosen timer to adjust the Compare trip point. This mode has a Compare register where the user can put
the value to which the TIMER1 register data will be compared. For the TIMER1 and CCP to function
properly, the TIMER1 register and CCP register must have the same initial value. In CCP, this initial value
will be added to the expected ripple count to establish the correct reference count.
While retrieving the actual ripple count, the period timer value equal to the initial value is added to the
content of the TIMER1 register to get the actual number of ripples that the motor rotated. In Equation 3-3,
the variable compareLoadValue has an added constant INITIAL_TIMER_VALUE to indicate that the
TIMER1 register has an initial value from where it will start counting. The CALIBRATION_VALUE is a
constant that is being deducted from the total count of expected ripples to compensate for the excess
movement of the motor due to inertia. It is dependent on the type of motor used and is obtained by
counting the excess ripples of the motor running in its rated voltage. These excess ripples can no longer
© 2019 Microchip Technology Inc. DS00003049A-page 19
AN3049
Ripple Counting Solutions
be converted into digital pulses because of their very small amplitude. When the TIMER1 value and CCP
value became equal, the CCP generates an interrupt that triggers the motor to stop and retrieve the ripple
count.
3.1.7 Getting the Ripple Count
The actual ripple count in Equation 3-4 comes from the TIMER1 register added to the period timer value;
subsequently, the combined value is shifted once to the left. This equation reverses the previous
operation made in the setting of the expected number of ripples in Equation 3-3. This operation is needed
in order to properly count the ripples and compensate for the limitation of the Gate Toggle mode.
Equation 3-4. Actual Ripple Count
����������������� = ���1_��������� + ������_�����1_����� < < 1
Equation 3-5. Angle Turned
����������� = �����������������/�������������������
The actual angle that the motor turned is calculated using Equation 3-5. All computations are performed
by the firmware. After getting all the values, EUSART is used to display the actual number of ripples and
actual angle. It is important that the position is displayed for the user to know if the desired angle has
been rotated.
3.1.8 Braking Mechanism
Just as starting the motor is important, stopping the motor in this application has been very critical, too.
The H-Bridge driver must be considered to avoid current shoot-through, which may take place if the two
switches on the same side turned on simultaneously. The braking mechanism of the motor is
accomplished through the firmware. The CWG is configured to Steer mode and a specific value is written
to CWG1STR to turn on the full-bridge driver low-side switches.
In this manner, the motor is shorted to ground by turning off the two high-side switches and turning on the
two low-side switches. When the motor terminals are shorted to ground, the BEMF across the motor will
cause the current to flow to the lower potential which is the ground that immediately drains the energy
across the motor. This braking mechanism is applicable to both forward and reverse motor drive.
3.1.9 Motor Positioning
There are two functions created for processing the angle: one for Forward mode and another for Reverse
mode of the motor. This is necessary for establishing the home and endpoint of the motor’s position.
From home, the motor can only move using the Forward mode. The motor may turn several times before
reaching the endpoint depending on the incremental angle chosen or the user can press the endpoint
button to immediately reach the endpoint. Upon reaching the endpoint, an LED will light up to indicate
that the motor has reached the endpoint.
If the user insists on pressing the button that causes forward motion, the motor will not rotate and will stay
still. This time the user can use the reverse button to turn backward depending on the desired angle set
or home button to go back home. Similar with Forward mode, upon reaching home an indicator LED will
light up to signify that the home is already reached and the button that triggers reverse movement will be
disabled. After every motor movement, the position will be recorded and stored in the EEPROM address.
This EEPROM address is read at the beginning of the next motor movement of the motor’s position in
order to be kept updated.
© 2019 Microchip Technology Inc. DS00003049A-page 20
AN3049
Ripple Counting Solutions
Figure 3-3. PIC18FXXQ10 Firmware Execution
Start
SYSTEM_Initialize();
Enable Interrupts
Compare_Initialize();
StallDetection_Initialize();
ReadMotorPositionFromEEPROM();
ReadInput();
Check Buttons
Yes getCountDone=0;
getCountDone?
getCountDone? GetAngleTurned();
MotorPosition();
No
motorStalled=0;
Yes GetAngleTurned();
motorStalled? MotorPosition();
__delay_ms(5000);
ResumeMotor();
No
Figure 3-3 shows the firmware flowchart of the solution. The firmware is developed through the aid of the
MPLAB® Code Configurator (MCC). The instructions for setting up the peripheral configurations used in
this application can be found in 8. Appendix B: MPLAB® Code Configuration (MCC) Peripheral
Initialization.
The firmware flow starts with a SYSTEM_Initialize() routine. This routine initializes pin configuration,
oscillator and all the peripherals used in the application. After system initialization, it is necessary to
enable interrupts to address the functions requiring interrupts such as Stall_ISR() and
Compare_ISR(). Compare_Initialize() routine initializes the Compare_ISR() as the Compare
interrupt handler. Compare_ISR() is the function that will be executed whenever compare peripheral
generates an interrupt. StallDetection_Initialize() routine sets up the protection feature of this
application.
© 2019 Microchip Technology Inc. DS00003049A-page 21
AN3049
Ripple Counting Solutions
When all the initialization is done, the firmware will be in a continuous loop executing the tasks as follows:
ReadMotorPositionFromEEPROM()routine is responsible for reading the motor’s position which is
necessary for the firmware to be kept updated on the motor’s current position before another rotation
begins. The next routine is ReadInput(), which gets the data from the potentiometer to select the
desired angle that the motor will turn and computes the equivalent number of expected ripples for a
specific desired angle. Check buttons are composed of four subroutines responsible for monitoring if a
particular button is pressed and it initiates the movement in a specific direction. After pressing a button,
the motor rotation and counting of pulses will start at the same time and continue rotation until a specific
rotational position is reached.
When the position is reached, the getCountDone value will be set to ‘1’ (which will be tested in the main
loop) and if the condition is satisfied, the program will proceed to GetAngleTurned() and
MotorPosition(). The GetAngleTurned() routine obtains the actual ripple count and calculates the
corresponding actual angle turned. While MotorPosition() routine adds the angle turned to the
previous position and stores the combined latest and previous position to the EEPROM. The condition
with a motorStalled test variable will only be satisfied if the motor is stalled (see the 4.1 Motor Stall
Detection section). The position of the motor will be stored through GetAngleTurned() and
MotorPosition() and will proceed to the position recovery through ResumeMotor() after a 5s delay.
The ResumeMotor()routine is responsible for the motor to return to its home position. The loop will be
continuously running, executing the tasks mentioned above. Refer to 9. Appendix C: Source Code
Listing for the complete source code.
3.2 PIC16F177X Solution
This solution uses the integration of analog and digital peripherals of the PIC16F177X device family to
create a one-chip solution. The PIC16F177X has a higher cost than all the PIC MCUs used in this
application, but it has built-in analog peripherals capable of internally converting the ripple signal to digital
pulses. Due to the elimination of the external op amp and comparators, the overall cost of the system
decreased. However, by using an internal comparator, the capacity to convert ripple signals into digital
pulses is limited by the internal comparator hysteresis. Furthermore, one constraint of this solution is
represented by the fixed I/O pins of the analog modules, which means that rerouting the analog signal to
other pins is not possible.
© 2019 Microchip Technology Inc. DS00003049A-page 22
AN3049
Ripple Counting Solutions
Figure 3-4. PIC16F177X Block Diagram
PIC16F177X Motor Supply
FULL- BDC
HEF PWM9 COG3 Signal MOTOR
Analog BRIDGE
Input for Desired COG3 DRIVER 2
Angle CIRCUIT
Shutdown
Signals
M1 Forward Switch
ADC
M1 Reverse Switch
FIRMWARE PWM3
M2 Forward Switch (Ripple Counter/
Motor Positioning)
Motor Supply
M2 Reverse Switch
COG1
Signal FULL- BDC
COG1 BRIDGE MOTOR
CCP DRIVER 1
EUSART CIRCUIT
Shutdown
Signals
TIMER1 HLT
CMP3
Overcurrent
FVR Signal
Op‐Amp
(Signal
Filtering and Current
CMP1 Monitor RSENSE
Conditioning)
VREF
The block diagram of the solution based on PIC16F177X is shown in Figure 3-4. The PIC16F177X device
family is created to support highly integrated applications. Through the integration of analog and digital
peripherals, a single device can drive a single motor at a time. Similar to the PIC18FXXQ10 solution, it
also uses CIPs in the design of the system such as: Complementary Output Generator (COG) and
Hardware Limit Timer (HLT).
In contrast with the previous solution, the signal filtering and conditioning is done using on-board op amp
and comparator peripherals. The use of on-board peripherals decreased the number of external
components, hence lowering the cost of the overall system. Furthermore, the use of a single chip to
reliably control the position of two motors reduced the system cost. Though this solution can address the
control of two motors, it is required that those motors must not operate simultaneously.
3.2.1 Internal Op Amp for Signal Filtering and Conditioning
The PIC16F177X family of devices have built-in op amp peripherals. In this application, the internal op
amp modules are used on an inverting configuration. The first internal op amp has the same functionality
as the first external op amp in the PIC18FXXQ10 solution. It is used for eliminating the signal’s DC
component and external noises. The second op amp is used in the differential amplifier configuration to
ensure that the signal will be detected by the comparator to prevent missed pulses during the motor start-
up. After these two stages, the signal is fed to the comparator for digital conversion.
© 2019 Microchip Technology Inc. DS00003049A-page 23
AN3049
Ripple Counting Solutions
3.2.2 PIC16F177X Ripple Counting Implementation
Figure 3-5. Control Diagram
Input References Motor 1 Drive
Four Input Buttons Firmware Calculation Full‐Bridge Signal
4 for Expected Ripple
Analog Input From
FULL-
Count and Direction BRIDGE BDC
Potentiometer Desired 5‐180° Control PWM3 COG1 MOTOR1
DRIVER
Angle CIRCUIT
Expected Ripple
Count Shutdown Signal
Firmware Fault Detection
Retrieval of CCP
Actual Ripple Peripheral Ripple Pulses from Motor Stall/
Verified Ripple MOTOR 1 Overcurrent Signal
Count
Count
Motor
Actual Ripple
Count Full‐Bridge Signal 2 Drive FULL-
BRIDGE BDC
PWM9 COG3 DRIVER MOTOR2
EUSART
TIMER1 Counting CIRCUIT
Shutdown Signal
Ripple Counting
Fault Detection
Ripple Pulses from Motor Stall/
MOTOR 2 Overcurrent Signal
3.2.3 Input References
Figure 3-5 shows the complete signal flow of the solution based on the PIC16F177X devices. The
manner of setting the desired angle and calculation of expected ripples are similar to the first solution.
The range of the angle that this system can handle is also from 5-180° with a 5° configurable angle
increment. For the direction control, there are four buttons used as an input to the system (two buttons
per motor for bidirectional control). This solution utilized all the equations used in PIC18FXXQ10 for
getting the ripple count per angle (Equation 3-1), expected ripple count (Equation 3-2) and compare load
value (Equation 3-3) that will be loaded into the CCP register. After processing all the inputs, the motor is
setup to be driven.
3.2.4 Motor Drive Signal
The drive signal of the motor is provided by the COG peripheral. COG is built in the functionality of CWG
with improved performance and additional features. For more information on the operation of the COG
peripheral refer to TB3119: Complementary Output Generator. Each motor is driven by a dedicated
COGx. The signal coming from the COGx controls the full-bridge driver circuit, which accomplishes the
actual driving of the motors. After successfully driving the motor, the BEMF signal is fed to the series of
internal operational amplifiers for filtering and conditioning. The processed signal is internally connected
to the comparator for ripple conversion.
3.2.5 Counting the Current Ripple
When the ripples are transformed to rectangular pulses, they can already be counted by TIMER1 but
there is no comparator option in the TIMER1 clock input source and TIMER1 gate input. The comparator
output cannot be connected internally to the TIMER1 input. To address this issue, the comparator output
is channeled externally and then fed back to the TIMER1 clock input and TIMER1 gate input through
another input pin. The counting of the pulses followed the same principle implemented in the Q10
solution. The TIMER1 and CCP modules have the same configuration with the first solution.
Only a pair of TIMER1 and CCP is used for counting the ripple because the motors will only be driven
one at a time. The expected ripple count is initially loaded to CCP, then the TIMER1 started its counting at
© 2019 Microchip Technology Inc. DS00003049A-page 24
AN3049
Ripple Counting Solutions
the same time as the motor is driven. When the TIMER1 register value equates the CCP register value,
the actual ripple count is retrieved in the firmware using Equation 3-4. Afterwards, the angle turned is
computed from the actual ripple count value using Equation 3-5. The values are displayed through
EUSART and managed for the home and endpoint establishment. Since motors are treated
independently, they also have separate memory addresses for storing the motor’s position. After every
measurement, the value is stored in the motor memory address and retrieve at the beginning of every
motor movement. The High Endurance Flash (HEF) memory, which is available in the PIC16F177X
family, is used for storing the position data.
3.2.6 Braking Mechanism
The braking mechanism used in this solution is similar to the one in the first solution. The COGx is
configured to Steer mode and a specific value is written to COGxSTR to turn on the full-bridge driver low-
side switches. In this manner, the motor is shorted to ground by turning off the two high-side switches and
turning on the two low-side switches. When the motor terminals are shorted to ground, the BEMF across
the motor will cause the current to flow to the lower potential, which is the ground that immediately drains
the energy across the motor. This braking mechanism is applicable to both forward and reverse motor
drive.
© 2019 Microchip Technology Inc. DS00003049A-page 25
AN3049
Ripple Counting Solutions
Figure 3-6. PIC16F177X Firmware Execution
Start
SYSTEM_Initialize();
Enable Interrupts
Compare_Initialize();
OvercurrentDetection_Initialize();
StallDetection_Initialize();
ReadMotorPositionFromHEF();
ReadInput();
Check Buttons
No No
getCountDone?
getCountDone? faultDetected?
Yes Yes
getCountDone =0; faultDetected = 0;
actualRippleCount = actualRippleCount =
GetActualRippleCount(); GetActualRippleCount();
Yes Yes
Motor01Position(); motor01? motor01? Motor01Position();
No No
Motor02Position(); Motor02Position(); __delay_ms(5000);
ResumeMotor();
Figure 3-6 shows the firmware flow of the solution based on the PIC16F177X devices. The functions
used are almost similar to the routines used in the PIC18FXXQ10 solution. But there are some additional
routines like OvercurrentDetection_Initialize(), which initializes the Overcurrent_ISR as
the comparator interrupt handler and will be triggered if an overcurrent occurred in the system. Two
separate routines were created for motor positioning Motor01Position() and Motor02Position()
to handle the position of two motors individually and save them to their specific HEF address. The test
variable faultDetected will only be satisfied if stall or overcurrent occurred. It has similar functionality
© 2019 Microchip Technology Inc. DS00003049A-page 26
AN3049
Ripple Counting Solutions
with the motorStall in the PIC18FXXQ10 solution, but it addresses two Faults. Similar to the first
solution, after the Fault detection took place the actual ripple count is retrieved through
GetActualRippleCount(), stored position depending on what motor rotated through
Motor01Position()or Motor02Position() and returned the motor to home through
ResumeMotor()after a 5s recovery period. Refer to 9. Appendix C: Source Code Listing for the
complete source code.
3.3 PIC16F188XX Solution
This solution is created for applications requiring simultaneous motor drives such as car mirrors or mud
flaps. This solution is also developed to control the position of a single motor or two motors concurrently.
The highlight of this solution is its capacity to drive two motors and control their positions simultaneously.
Figure 3-7. PIC16F188XX Block Diagram
PIC16F188XX Motor Supply
PWM2 CWG2 FULL-
Analog EEPROM Signal BDC
CWG2 BRIDGE MOTOR
Input for Desired DRIVER
Angle 2
CIRCUIT
Motor Selector Shutdown
ADC Signal
Switch
HLT
Set Angle Button
FIRMWARE Op-Amp
Forward Switch (Ripple Counter/ (Signal Current
Motor Positioning) Filtering and Monitor Rsense
SMT2 C2 Conditioning)
Reverse Switch
Ref
Motor Supply
EUSART CWG1
PWM1 CWG1 Signal
FULL- BDC
BRIDGE MOTOR
SMT1 DRIVER 1
Shutdown CIRCUIT
Signal
HLT
Op-Amp
(Signal
Filtering and Current
C1 Conditioning) Monitor Rsense
Ref
The block diagram of the solution based on PIC16F188XX is illustrated in Figure 3-7. The PIC16F188XX
family is composed of full-featured devices for general purpose and low-power applications. Similar to the
previous solutions, the drive is accomplished through CIP–CWG and the functionality of the whole
solution is achieved through the integration of on-chip peripherals and CIPs. The conversion of the ripple
signal to digital pulses is accomplished externally similar to the PIC18FXXQ10 implementation.
The pulses from two motors are fed to a dedicated SMTx for counting. The Signal Measurement Timer
(SMT) peripheral is used for counting the ripple pulses. The use of SMT made the simultaneous position
control possible because there will be a dedicated hardware counter for each motor. SMT is a 24-bit
counter/timer with advanced clock and gating logic. Refer to 3.3.4 Counting the Current Ripple section to
learn how this peripheral is implemented in this application. The succeeding section will discuss the
counting implementation of the solution.
© 2019 Microchip Technology Inc. DS00003049A-page 27
AN3049
Ripple Counting Solutions
3.3.1 PIC16F188XX Ripple Counting Implementation
Figure 3-8. PIC16F188XX Control Diagram
Input References Motor 1 Drive
Four Input Buttons
4 Firmware Calculation Full‐Bridge Signal
Analog Input From for Expected Ripple FULL-
BRIDGE BDC
Potentiometer
Desired 5‐180° Count01 and
MOTOR
Angle RippleCount02 PWM1 CWG1 DRIVER
CIRCUIT 1
Expected Ripple Count
Shutdown
SMT1_SetPeriod(); Signal
Verified Fault
Ripple Count Actual Ripple Count
Detection
Firmware SMT1_GetTimerValue;
Retrieval of Ripple Pulses
Actual Ripple from MOTOR 1 Motor Stall Signal
Count Expected Ripple
Count02
Motor 2 Drive
Full‐Bridge Signal FULL-
SMT2_SetPeriod();
BRIDGE BDC
PWM2 CWG2 MOTOR
DRIVER
EUSART Actual Ripple CIRCUIT 2
Count02
Shutdown Signal
SMT2_GetTimerValue;
Ripple Counting Fault
Ripple Pulses Detection
from MOTOR 2
Motor Stall Signal
3.3.2 Input References
Figure 3-8 shows the complete signal flow of the solution based on the PIC16F188X devices. The
manner of setting the desired angle and calculation of expected ripples are similar to the previous
solutions. The range of angle that this system can handle is also from 5-180° with a 5° configurable angle
increment. There are four buttons used as input to the system: two buttons were used for direction control
(forward and reverse), one of them is used as a motor selector, and the other one is used for setting the
angle desired for a specific motor in dual motor drive.
This solution used all the equations in PIC18FXXQ10 for getting the ripple count per angle (Equation 3-1)
and the expected ripple count (Equation 3-2). The expected ripple count is initially loaded to the SMTx
Period register in which the SMTx Timer register value will be continually compared. The SMT peripheral
has an advantage of performing the counting functionality of both CCP and TIMER. It is a core
independent peripheral that reduces the burden on the main core. After completing the parameter
initialization, the motor is setup to be driven.
3.3.3 Motor Drive Signal
This solution is created to drive motors individually or simultaneously. The integration of the firmware and
hardware made it possible to select a specific motor or motors to rotate. Similar to the first solution, the
PWM generates a full-bridge signal with 100% duty cycle to supply the specific CWG. The PWM is set to
100% duty cycle, since this application does not require the modulation of motor speed. The PWM signal
is directed by the CWGx peripheral to its specific channels depending on the chosen CWGx mode. Each
motor has an independent CGWx driver that provides full-bridge drive signal to the driver circuit. The
signal coming from the CWGx controls the full-bridge driver circuit, which accomplishes the actual driving
of the motor. The feedback signal from the motor is processed to obtain a series of digital pulses that are
supplied to the SMTx signal input for counting. The next segment will show how the ripple pulses are
handled by SMT peripheral.
© 2019 Microchip Technology Inc. DS00003049A-page 28
AN3049
Ripple Counting Solutions
3.3.4 Counting the Current Ripple
The main goal of this counting implementation is to count all the ripples until the number of expected
ripples is reached. To accomplish this, the SMTx is configured to Counter mode because this mode
enables the ripple pulses to be continuously counted without requiring a window signal. The input polarity
of the signal is set to rising edge, which means that in every rising edge of the signal the SMTx Timer
register value increases.
Figure 3-9. SMTx Counting Diagram
SMTxEN
SMTxGO
SMTX Signal/
Ripple Pulse
SMTxPR 360
SMTxTMR 0 1 2 3 4 5 6 7 8 9 ... 360
SMTxPR and SMTxTMR
register value matched at
SMTx this point
Interrupt
Figure 3-9 shows the diagram that describes how counting is performed by SMT. The ripples are fed to
the SMTx signal input. The SMTx Timer register value increments with every rising edge of the signal.
When the SMTx period equates the value of the SMTx timer, an interrupt will occur. This match interrupt
will trigger the capture of the SMTx timer value that contains the actual ripple count. The interrupt will also
trigger the stopping of the motor, which is accomplished using the braking mechanism discussed in the
first solution. The actual ripple count will then be converted to the corresponding angle turned using
Equation 3-5.
After getting the angle turned the data will be handed to the functions managing the position of the
motors. The position is stored in the EEPROM after every motor rotation. The stored position will be
retrieved before another rotation begins for the motors’ position to be kept updated and monitored.
© 2019 Microchip Technology Inc. DS00003049A-page 29
AN3049
Ripple Counting Solutions
Figure 3-10. PIC16F188XX Firmware Execution
Start
SYSTEM_Initialize();
Enable Interrupts
StallDetection_Initialize();
CheckMotorSelectorButton();
Switch selectMotor
Case 1: MotorDrive01();
Case 2: MotorDrive02();
Case 3: DualMotorDrive();
Yes
switchEvent? NextMotor();
No
Figure 3-10 shows the firmware flow of the solution based on the PIC16F188XX devices. The process of
initializing the device through the SYSTEM_Initialize() routine and enabling interrupts is similar to
the PIC18FXXQ10 solution. In the continuous loop, the CheckMotorSelectorButton()routine is used
to check the button to select the motor that will be driven in the switch-case statements. The
MotorDrive01() routine drives motor 1, controls its position and saves it to EEPROM, while the
MotorDrive02() routine drives motor 2, controls its position and saves it to EEPROM as well. The
DualMotorDrive02() routine performs the drive and position control of both motors and stores the
position to the motors’ specific addresses. Those are the sequences of the routines that the program has
continuously executed. Refer to 9. Appendix C: Source Code Listing for the complete source code.
© 2019 Microchip Technology Inc. DS00003049A-page 30
AN3049
Motor Safety Features
4. Motor Safety Features
It is of prime importance that the system’s performance will not be adversely affected when it encounters
a problem and it must recover after the Fault took place. Two safety features used to secure the motor in
the Fault event are discussed below.
4.1 Motor Stall Detection
When the motor is spinning freely, the ripple pulses are continuously being fed back to the system. If the
motor halts, the trail of digital pulses will also stop. The peripheral used for detecting the stall is the
Hardware Limit Timer (HLT) mode in TIMER2/4/6. The primary function of HLT is to monitor any changes
in the periodic pulses, and its controlled mode is set to roll over pulse.
When the signal is absent for resetting the value of HLT, it will generate an interrupt which will be used as
a trigger to shut down the COG/CWG depending on the device family. The diagram in Figure 4-1 shows
the HLT implementation in this application.
Figure 4-1. HLT Implementation
Shutdown Signal COG/ FULL-BRIDGE
DRIVER
BDC
CWG CIRCUIT MOTOR
Conditioned
Signal
HLT Comparator
FVR
The comparator output, which produces the digital pulses serves as an external reset source to HLT. The
desired period of HLT is set depending on the rated speed of the motor. In this application, the motor
used has a rated speed of 40 RPM. This speed expressed in RPM must be converted to a value that will
be loaded to HLT period register which is done using the equation below.
The T4PR value must be larger than the value that will be directly calculated from the given speed. In this
manner, the pulse will occur first and reset the Timer4 count before period match happens. With a rotating
motor the pulses are continuously resetting the Timer4 count, avoiding the occurrence of period match.
However, when the motor is stalled, the pulses will not be present to reset the Timer 4 count, thus the
timer continues to increment until the period match occurs. Every time the period match occurs, an
interrupt event is triggered. It can be used to shut down the COG/CWG and indicate that the motor is in a
Stall condition.
Equation 4-1. RPM to T4PR Conversion
RPM * TMR4ClockSource Hz
T4PR >
60 * PrescalerValue * PostscalerValue
40 * MFINTOSC 40 * 31250
T4PR > > > 162 or 0xA2
60 * 128 * 1 60 * 128 * 1
Note: T4PR register value must be greater than 162 or 0xA2.
© 2019 Microchip Technology Inc. DS00003049A-page 31
AN3049
Motor Safety Features
4.2 Overcurrent Detection
Overcurrent is a condition where there is an excessive current flow in the motor windings, hence
exceeding the rated current in which the motor is designed to carry safely and efficiently. It can be caused
by excessive torque loading, short-circuit conductors or an excessive voltage supply. To prevent motor
damage, there must be a way to detect Fault when overcurrent occurs. The implementation of this
protection feature using PIC16F177X is discussed below.
Figure 4-2. PIC16F177X Overcurrent Implementation
Shutdown Signal FULL-BRIDGE
COG DRIVER
BDC
CIRCUIT MOTOR
Conditioned
Signal
Comparator
FVR
In Figure 4-2, the input is taken from the conditioned signal after the operational amplifier stages. The
conditioned signal is fed to the inverting input of the comparator and compared to a reference voltage.
This reference voltage results from the product of the current shunt resistance, the maximum allowable
motor stall current and gain of the amplifiers used. The reference voltage is provided by the FVR. When
overcurrent occurs, the conditioned signal voltage will exceed the reference voltage and the comparator
will generate a signal to trigger the COG auto-shutdown feature.
© 2019 Microchip Technology Inc. DS00003049A-page 32
AN3049
Ripple Counting Performance
5. Ripple Counting Performance
The results below show the waveforms, desired angle, calculated expected ripple count, actual ripple
count, angle turned and percentage error at different angles tested using NIDEC COPAL MG16B-240-
AB-00 with the gear ratio of 256. In the motor data sheet, it is indicated that the gear ratio is 240. But the
results were inaccurate using this number, so it was carefully inspected and the real gear ratio came out
to be 256.
Figure 5-1. 5° Angular Movement
© 2019 Microchip Technology Inc. DS00003049A-page 33
AN3049
Ripple Counting Performance
Figure 5-2. 60° Angular Movement
Figure 5-3. 90° Angular Movement
© 2019 Microchip Technology Inc. DS00003049A-page 34
AN3049
Ripple Counting Performance
The difference between the motor operation with and without load has also been observed. Figure 5-4
shows the signal difference between those conditions. At the same 12V of motor voltage, the ripple
current is greater when there is a load causing a higher voltage swing as the ripple frequency decreases.
The higher voltage swing makes the comparator easily recognize the high/low voltage transition.
Figure 5-4. Ripple Conversion with/without Loading Condition
© 2019 Microchip Technology Inc. DS00003049A-page 35
AN3049
Conclusion
6. Conclusion
This application note discusses how the ripples were successfully converted to pulses countable by the
Microchip PIC devices. These pulses are counted and processed to estimate the position of the motor.
The highly-flexible solution is achieved through the PIC18FXXQ10 family, the one chip solution is attained
through the PIC16F177X family and the dual motor simultaneous BDC motor control is achieved through
the PIC16F188XX family. The implementation of ripple counting in BDC positioning has considerably
lowered the total system cost and the motor is protected by safety features in case of Fault event.
© 2019 Microchip Technology Inc. DS00003049A-page 36
AN3049
Appendix A: Circuit Schematic
7. Appendix A: Circuit Schematic
Figure 7-1. PIC18FXXQ10 Schematic Diagram
VMOTOR
CWGxD
CWGxA
CWGxC
CWGxB
PIC18FXXQ10
END_LED
RA4
5V VDD
HOME_
LED
RA5
MIC4606
STALL_
VSS
LED
RA6
RIPPLE_
LED
RA7
MOTOR_PIN_A MOTOR_PIN_B
5V POT RA0
CWGxA
RB0
HOME RB1
C1
CWGxB
C8 RD1
1 uF 1 uF END RB2
CWGxC
RD2
FWD RB4
CWGxD
REV RC5 RD3
USART_
RC6
TX
PULSE RA2
I2
400m R1
C12 C11
I1
1 uF
2.2 uF END_LED
VMOTOR
HOME_LED
D1
STALL_LED
5V 1k
POT
RIPPLE_LED
R5
R21 R22 R23 R24
R8 R6 220K 1K 1K 1K 1K
I1 TP1
1k 10K
1k
- R4 LED2 LED3
56 pF C5 LED4 LED5
IM
R9 R7 + 1k
I2 1 nF C4
1k MCP6024-A
1k
220K R16
5V
MCP6024-B 5V
VREF
10K R14 5V
- 5V
VREF
+ 1k R10
C6 R13 C7 1 uF
.1 uF 10K 10K R25
LED1 10K R27
C3 1k
1k
HOME
FWD
68 pF SW1
R26 SW2 R28
R3 R15
TP2 TP2 5V
1.5M 1.5M 5V
C2
R2 R11 22K
IM - -
RIPPLE
6.8 nF 220K
+ + MCP6024-C 10K R29
R17 22K 10K R31
VREF C9 R12
1.5M 1k
1 nF
1k
END
REV
VREF
SW3 R30
SW4 R32
MCP6541
TP3
RIPPLE -
PULSE
5V 5V +
R18 1k
3.3K
C1 .1 uF
R19 1k R20
© 2019 Microchip Technology Inc. DS00003049A-page 37
AN3049
Appendix A: Circuit Schematic
Figure 7-2. PIC16F177X Schematic Diagram
PIC16F188XX
OVERCURRE
NT_LED
RB2
5V VDD
STALL_
LED
RD3
VSS
COG3C
POT RE0 RA7 5V R24
OVERCURRENT_LED
POT
COG3A
M1_FWD RA5 RC0 STALL_LED 1k
M1_REV RB0
COG1A
RC7 R21 R22
1k 1k R23
M2_REV RB5
COG1B
RD4 10K
M2_FWD RC2
COG1C
RD5
VREF
LED1
COG1D
RD6 LED2
R5
R8 C9 1 nF R12 1.5M
220K
COG3D
R6 RD7
I1 R17
1k 1k RD0 5V
1k
COG3B
- RE1 5V
22K
IM
RIPPLE
C5 + R4 RD1
R9 R7
I2 R11 R15 1.5M
MCP6022-A 1 nF C4 RD2
1k 1k R25
R16 22K 10K R27 10K
220K
SDO
5V RA1 RC5 R26
R28
MCP6022-B
M1_F
USART_
M1_RE
WD
C3 R3 VREF RA4 RC6
TX
VREF
10K R14 C2
V
R2 100 pF 1.5M
- SW1
IM RB1 1k SW3
VREF
1k
+ 22 nF 100K
C6 R13 5V RIPPLE RA0 5V
.1 uF 10K 5V
PULSE
RA3
1K R18 1K
3.3K
RA6 R29 10K
R19 R20 R31 10K
RB3
R30
R32
M2_F
wd
RIPPLE RC1
M2_RE
V
SW2 1k
SCK RC3 SW4 1k
SDI RC4
VMOTOR VMOTOR
COG1D
COG2D
COG1A
COG2A
COG1C
COG2C
COG1B
COG2B
MIC4606 MIC4606
MOTOR1_PIN_A MOTOR1_PIN_B MOTOR2_PIN_A MOTOR2_PIN_B
5V 5V
C8 C1 C13 C14
400m R1
C12 C11 C11 C12
VMOTOR VMOTOR
D1 D2
© 2019 Microchip Technology Inc. DS00003049A-page 38
AN3049
Appendix A: Circuit Schematic
Figure 7-3. PIC16F188XX Schematic Diagram
VMOTOR
CWG1D
CWG1A
CWG1C
CWG1B
PIC16F188XX
HOME_
LED
RB2
5V VDD
END_LED
RB3
VSS
STALL_
MIC4606
LED
RD0
CWG1A
RB4
POT RA0
MOTOR1_PIN_A MOTOR1_PIN_B
CWG1B
RB5 5V
SET_ANGLE RA7
CWG1C
MOTOR_SELECT RA6 RB6 C1
C8
1 uF 1 uF
CWG1D
FWD RA5 RB7
CWG2A
REV RB0 RC7
CWG2B
PULSE1 RC1 RD2
CWG2C
PULSE2 RD6 RD3
I2
CWG2D
RD4
USART_
400m R1
RC6 C12 C11
TX
I1
1 uF
2.2 uF
VMOTOR
D1
5V
5V
VMOTOR
CWG2D
CWG2A
CWG2C
CWG2B
10K R41
10K R43
1k
SET_AN
1k
MOTOR_
GLE
SELECT
SW1 R42 SW2 R44
MIC4606
5V
5V
MOTOR2_PIN_A MOTOR_2_PIN_B
5V
10K R45
10K R47
C13
C14
1 uF 1 uF
1k
END
1k
REV
SW3 R46
SW4 R48
I4
END_LED
HOME_LED
400m R21
STALL_LED
5V 1k C15 C16
I3
POT
1 uF
2.2 uF
R52 VMOTOR
1k 1k 1k R53 D2
10K
R49 R50 R51
LED3 LED4 LED5
R5
R26
R8 R6 220K
I1 TP1 R22 R24 220K
1k 1k I4 TP5
- R4
1k
IM1
56 pF C5 1k
- R27
IM2
R9 R7 + 1k 56 pF C17
I2 R23 R25 + 1k
MCP6024-A 1 nF C4
1k 1k I3 1 nF
MCP6024-A C18
1k 1k
220K R16
5V 220K R28
MCP6024-B 5V
5V
VREF1
R14 MCP6024-B 5V
10K
VREF2
- 10K R29
VREF1
-
VREF2
+ 1k R10
C6 R13 C7 1 uF + 1k R31
.1 uF 10K C19 R30 C20 1 uF
LED1 .1 uF 10K
LED2
C3
C22
68 pF
R3 R15 100 pF
TP2 TP3 R33 R36
1.5M 1.5M TP6 TP7
C2
R2 R11 22K 1.5M 1.5M
IM1 - - C21
R32
RIPPLE
R34 22K
220K IM2 - -
1
RIPPLE
6.8 nF + + 100K
2
MCP6024-C 22 nF
R17 22K + + MCP6024-C
R35 22K
VREF1 C9 R12
1 nF 1.5M VREF2 C23 R37
1 nF 1.5M
VREF1
VREF2
MCP6541
TP4 MCP6541
PULSE1
RIPPLE1 - TP8
PULSE2
RIPPLE2 -
5V 5V +
5V 5V +
R18 1k
3.3K
R38 1k
C1 .1 uF 3.3K
R19 1k R20 C24 .1 uF
R39 1k R40
© 2019 Microchip Technology Inc. DS00003049A-page 39
AN3049
Appendix B: MPLAB® Code Configuration (MCC) Periph...
8. Appendix B: MPLAB® Code Configuration (MCC) Peripheral
Initialization
MPLAB® Code Configurator is an easy-to-use plugin tool for MPLAB® X IDE that generates codes for
controlling the peripherals of Microchip microcontrollers, based on the settings made in its Graphical User
Interface (GUI). MPLAB Code Configurator is utilized to easily configure the peripherals used in this
motor control application. Refer to the MPLAB® Code Configurator User’s Guide (DS40001725) for
further information on how to install and set up the MCC in MPLAB X IDE.
The step-by-step process of using MCC in each of the three solutions of this motor control positioning
application is discussed in this section.
8.1 PIC18FXXQ10 Solution MCC Initialization
1. In the System Module, set the clock to HFINTOSC with 32 MHz frequency.
2. Set the ADCC module to Basic_mode, with FOSC/ADCLK clock source configured to FOSC/32.
3. For providing drive signal to the motor, three peripherals are needed to be configured: CCP2,
TIMER2 and CWG. Prior to setting the CCP2 in PWM mode, the Timer 2 must be enabled with
FOSC/4 clock source. In the CCP2 module, choose the PWM mode and select TIMER 2 as the
assigned timer and also set the duty cycle to 100%. Enable the CCP2. The CWG must be
configured with CCP2_OUT as an input source, with Output mode in Forward Full-Bridge mode and
HFINTOSC as the selected clock source. Enable the CWG.
4. In counting the digital pulses, three peripherals are utilized: CLC1, CCP1 and TIMER1. The CLC1
is used for rerouting the input to TMR1 clock source and gate signal source. Configure CLC1 in 4-
input AND mode, with one gate having the input pulses and the rest of the three AND gates
inverted to produce an output 1 so that CLC1 acts as a buffer. Enable the CLC1. The CCP1 must
be set to Compare mode with TIMER1 as the assigned timer for adjusting its trip point. Set
COMPARE in Toggle mode. Enable the CCP interrupt and the CCP module. Choose the CLC1OUT
as a TIMER1 clock source, enable the gate and enable Gate Toggle mode with CLC1OUT as the
gate signal source and gate polarity as HIGH. Put an initial period count of 0x7FFF being half of the
maximum count. Enable the Timer Gate interrupt, but do not enable the TIMER1 yet. The TIMER1
will be enabled in the program.
5. For displaying the data, EUSART1 is configured in Asynchronous mode with Transmit enabled, and
a baud rate of 9600. Under its software settings, tick the box next to Redirect STDIO to USART.
6. The MEMORY is added to store the data. From the Device Resources, find the MEMORY and
double click so that it will be added to the application.
7. TIMER4 is configured to its Hardware Limit Timer mode to be used for stall detection. The clock
source used is MFINTOSC_31.25 kHz with a Prescaler value of 1:128 to extend the period range
and Timer Period set to 100 ms. CLC1_OUT is used as an input to the external reset source, with
Roll Over Pulse Control mode and TIMER4 resets its count every rising of signal on its reset
source. Enable the Timer interrupt, but do not enable the TIMER4 yet, it will be enabled in the
program.
8. In the PIN MANAGER configuration, set up the input/output pins of all the peripherals as shown in
Figure 8-1.
9. After configuring all the peripherals, click the ‘Generate Code’ button next to the Project Resources
tab name in the top left corner. This will generate a main.c file to the project automatically. It will
also initialize the module and leave an empty while(1) loop for custom code entry.
© 2019 Microchip Technology Inc. DS00003049A-page 40
AN3049
Appendix B: MPLAB® Code Configuration (MCC) Periph...
Figure 8-1. PIC18FXXQ10 Pin Manager Configuration
© 2019 Microchip Technology Inc. DS00003049A-page 41
AN3049
Appendix B: MPLAB® Code Configuration (MCC) Periph...
8.2 PIC16F177X Solution MCC Initialization
1. In the System Module, set the clock to INTOSC with 16 MHz frequency.
2. Set the ADC Clock to FOSC/16 clock source.
3. Three peripherals are needed to be configured for each motor drive. TIMER2 is common to both
driving motors since it is used for adjusting the frequency of the PWMx. The TIMER2 clock source
is set to FOSC/4 before it is enabled. For driving motor 1: PWM3, TIMER2 and COG1 are used. In
the PWM3 module, select the TIMER2 as the assigned timer and set the duty cycle to 100%.
Enable the PWM. The COG1 must be configured with PWM3 output as an input source to rising
and falling event, with Output mode in Forward Full-Bridge mode and HFINTOSC is selected as the
clock source. Enable the COG1. For driving motor 2: PWM9, TIMER2 and COG3 are used. In the
PWM9 module, select the TIMER2 as the assigned timer and set the duty cycle to 100%. Enable
the PWM. The COG3 must be configured with PWM9 output as an input source to the rising and
falling event, with Output mode in Forward Full-Bridge mode and HFINTOSC is chosen as the clock
source. Enable the COG3.
4. In converting ripples to digital pulses, analog peripherals are used. OPA1 is used for signal filtering,
the positive channel is taken from OPA1IN0+ and the negative channel is supplied from OPA1IN1-.
OPA4 is used for signal conditioning, the positive channel is taken from OPA4IN0+ and the
negative channel is supplied from OPA4IN1-. Enable each op amp after setting up the module.
CMP1 is used for converting the conditioned signal to digital pulses with inverted output polarity.
The chosen channel for positive input is CIN1+ and for the negative input is CIN0-. Enable the
module after choosing the desired configuration.
5. In counting the digital pulses, two peripherals are utilized: CCP1 and TIMER1. The CCP1 must be
configured to Compare mode with TIMER1 as the assigned timer for adjusting its trip point. Select
Toggle mode. Enable the CCP interrupt and enable the CCP module. Choose External as the
TIMER1 clock source, enable the gate and enable Gate Toggle mode with T1G_pin as the gate
signal source and gate polarity as HIGHS. Put an initial period count of 0x7FFF being half of the
maximum count. Enable the Timer Gate interrupt, but do not enable the TIMER1 yet. The TIMER1
will be enabled in the program.
6. For displaying the data, EUSART1 is configured in Asynchronous mode with Transmit enabled, and
baud rate of 9600. Under its software settings, tick the box next to Redirect STDIO to USART.
Another peripheral used for display is MSSP; this peripheral is used to communicate with an LCD.
Choose the SPI Master mode, with Clock Polarity (Idle:Low, Active:High) and Clock Edge set to
Active to Idle. The SPI clock source is FOSC/64.
7. The MEMORY is added to store the data. From the Device Resources, look for the MEMORY
module and double click it so that it will be added to the application.
8. This application is equipped with safety features: Stall Detection and Overcurrent Detection. For
Stall Detection, TIMER4 is configured to its Hardware Limit Timer mode. The clock source used is
MFINTOSC_31.25 kHz with a Prescaler value of 1:128 to extend the period range and Timer
Period set to 100 ms. C1OUT is used as an input to the external reset source, with Roll Over Pulse
Control mode and TIMER4 resets its count every rising of signal on its reset source.
9. In the PIN MANAGER configuration, set up the input/output pins of all the peripherals as shown in
Figure 8-2.
10. After configuring all the peripherals, click the ‘Generate Code’ button next to the Project Resources
tab name in the top left corner. This will generate a main.c file to the project automatically. It will
also initialize the module and leave an empty while(1) loop for custom code entry.
© 2019 Microchip Technology Inc. DS00003049A-page 42
AN3049
Appendix B: MPLAB® Code Configuration (MCC) Periph...
Figure 8-2. PIC16F177X Pin Manager Configuration
© 2019 Microchip Technology Inc. DS00003049A-page 43
AN3049
Appendix B: MPLAB® Code Configuration (MCC) Periph...
8.3 PIC16F188XX Solution MCC Initialization
1. In the System Module, set the clock to HFINTOSC with 32 MHz frequency.
2. Set the ADCC module to Basic_mode, with FOSC/ADCLK clock source configured to FOSC/32.
3. Three peripherals are needed to be configured for each motor drive. TIMER2 is common to both
motor drives since it is used for adjusting the frequency of the PWMx. The clock source is set to
FOSC/4, afterwards TIMER2 is enabled. For driving motor 1: CCP1, TIMER2 and CWG1 are used.
In the CCP1 module, choose the PWM mode and select TIMER 2 as the assigned timer and also
set the duty cycle to 100%. Enable the CCP1. The CWG1 must be configured with CCP1_OUT as
an input source, with Output mode in Forward Full-Bridge mode and HFINTOSC as the selected
clock source. Enable the CWG1. For driving motor 2: CCP2, TIMER2 and CWG2 are used. In
CCP2 module, choose the PWM mode and select TIMER 2 as the assigned timer and also set the
duty cycle to 100%. Enable the CCP2. The CWG2 must be configured with CCP2_OUT as an input
source, with Output mode in Forward Full-Bridge mode and HFINTOSC as the selected clock
source. Enable the CWG2.
4. In counting the digital pulses, the signal measurement timer is used. Since this solution is created
to drive two motors simultaneously, each motor has a dedicated SMT counter. SMT1 is used for
counting the pulses from Motor 1. It is configured to Counter mode with Repeated Data Acquisition.
The signal input is taken from SMT1SIGPPS with high/rising edge input polarity and the period
count is initialized with the value of 0x7FFFFF. Tick the box next to Enable the Match Interrupt and
Enable SMT, but do not tick the box next to Data Acquisition After Init. The Data Acquisition will be
enabled in the program. While SMT2 is used for counting the pulses from Motor 2. It is configured
to Counter mode with Repeated Data Acquisition. The Signal input is taken from SMT2SIGPPS
with high/rising edge input polarity and the period count is initialized with the value of 0x7FFFFF.
Tick the box next to Enable the Match Interrupt and Enable SMT, but do not tick the box next to
Data Acquisition After Init. The Data Acquisition will be enabled in the program as well.
5. For displaying the data, EUSART1 is configured in Asynchronous mode with Transmit enabled, and
baud rate of 9600. Under its software settings, tick the box next to Redirect STDIO to USART.
Another peripheral used for display is MSSP; this peripheral is used to communicate with an LCD.
Choose the SPI Master mode, with Clock Polarity(Idle:Low, Active:High) and Clock Edge set to
Active to Idle. The SPI clock source is FOSC/64.
6. The MEMORY is added to store the data. From the Device Resources, find the MEMORY module
and double click it so that it will be added to the application.
7. For safety features, each motor has a dedicated timer for stall detection. TIMER4 is configured to
its Hardware Limit Timer mode and used for detecting stall in motor 1. The clock source used is
MFINTOSC_31.25 kHz with a Prescaler value of 1:128 to extend the period range and Timer
Period set to 100 ms. The T4CKIPPS pin is used as an input to the external reset source, with Roll
Over Pulse Control mode and TIMER4 resets its count every rising of signal on its reset source.
Enable the Timer interrupt, but do not enable the TIMER4 yet, it will be enabled in the program.
While TIMER6 is configured to its Hardware Limit Timer mode and used for detecting stall in motor
2. The clock source used is the same with TIMER4. The T6CKIPPS pin is used as an input to the
external reset source, with Roll Over Pulse Control mode and TIMER6 resets its count every rising
of signal on its reset source. Enable the Timer interrupt, but do not enable the TIMER6 yet, it will be
enabled in the program.
8. In the PIN MANAGER configuration, set up the input/output pins of all the peripherals as shown in
Figure 8-3.
© 2019 Microchip Technology Inc. DS00003049A-page 44
AN3049
Appendix B: MPLAB® Code Configuration (MCC) Periph...
9. After configuring all the peripherals, click the ‘Generate Code’ button next to the Project Resources
tab name in the top left corner. This will generate a main.c file to the project automatically. It will
also initialize the module and leave an empty while(1) loop for custom code entry.
Figure 8-3. PIC16F188XX Pin Manager Configuration
© 2019 Microchip Technology Inc. DS00003049A-page 45
AN3049
Appendix C: Source Code Listing
9. Appendix C: Source Code Listing
The latest software version can be downloaded from the Microchip website (www.microchip.com). The
user will find the source code appended to the electronic version of this application note. The latest
version is v1.0.
© 2019 Microchip Technology Inc. DS00003049A-page 46
AN3049
The Microchip Web Site
Microchip provides online support via our web site at http://www.microchip.com/. This web site is used as
a means to make files and information easily available to customers. Accessible by using your favorite
Internet browser, the web site contains the following information:
• Product Support – Data sheets and errata, application notes and sample programs, design
resources, user’s guides and hardware support documents, latest software releases and archived
software
• General Technical Support – Frequently Asked Questions (FAQ), technical support requests, online
discussion groups, Microchip consultant program member listing
• Business of Microchip – Product selector and ordering guides, latest Microchip press releases,
listing of seminars and events, listings of Microchip sales offices, distributors and factory
representatives
Customer Change Notification Service
Microchip’s customer notification service helps keep customers current on Microchip products.
Subscribers will receive e-mail notification whenever there are changes, updates, revisions or errata
related to a specified product family or development tool of interest.
To register, access the Microchip web site at http://www.microchip.com/. Under “Support”, click on
“Customer Change Notification” and follow the registration instructions.
Customer Support
Users of Microchip products can receive assistance through several channels:
• Distributor or Representative
• Local Sales Office
• Field Application Engineer (FAE)
• Technical Support
Customers should contact their distributor, representative or Field Application Engineer (FAE) for support.
Local sales offices are also available to help customers. A listing of sales offices and locations is included
in the back of this document.
Technical support is available through the web site at: http://www.microchip.com/support
Microchip Devices Code Protection Feature
Note the following details of the code protection feature on Microchip devices:
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the
market today, when used in the intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of
these methods, to our knowledge, require using the Microchip products in a manner outside the
operating specifications contained in Microchip’s Data Sheets. Most likely, the person doing so is
engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
© 2019 Microchip Technology Inc. DS00003049A-page 47
AN3049
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their
code. Code protection does not mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the
code protection features of our products. Attempts to break Microchip’s code protection feature may be a
violation of the Digital Millennium Copyright Act. If such acts allow unauthorized access to your software
or other copyrighted work, you may have a right to sue for relief under that Act.
Legal Notice
Information contained in this publication regarding device applications and the like is provided only for
your convenience and may be superseded by updates. It is your responsibility to ensure that your
application meets with your specifications. MICROCHIP MAKES NO REPRESENTATIONS OR
WARRANTIES OF ANY KIND WHETHER EXPRESS OR IMPLIED, WRITTEN OR ORAL, STATUTORY
OR OTHERWISE, RELATED TO THE INFORMATION, INCLUDING BUT NOT LIMITED TO ITS
CONDITION, QUALITY, PERFORMANCE, MERCHANTABILITY OR FITNESS FOR PURPOSE.
Microchip disclaims all liability arising from this information and its use. Use of Microchip devices in life
support and/or safety applications is entirely at the buyer’s risk, and the buyer agrees to defend,
indemnify and hold harmless Microchip from any and all damages, claims, suits, or expenses resulting
from such use. No licenses are conveyed, implicitly or otherwise, under any Microchip intellectual
property rights unless otherwise stated.
Trademarks
The Microchip name and logo, the Microchip logo, AnyRate, AVR, AVR logo, AVR Freaks, BitCloud,
chipKIT, chipKIT logo, CryptoMemory, CryptoRF, dsPIC, FlashFlex, flexPWR, Heldo, JukeBlox, KeeLoq,
Kleer, LANCheck, LINK MD, maXStylus, maXTouch, MediaLB, megaAVR, MOST, MOST logo, MPLAB,
OptoLyzer, PIC, picoPower, PICSTART, PIC32 logo, Prochip Designer, QTouch, SAM-BA, SpyNIC, SST,
SST Logo, SuperFlash, tinyAVR, UNI/O, and XMEGA are registered trademarks of Microchip Technology
Incorporated in the U.S.A. and other countries.
ClockWorks, The Embedded Control Solutions Company, EtherSynch, Hyper Speed Control, HyperLight
Load, IntelliMOS, mTouch, Precision Edge, and Quiet-Wire are registered trademarks of Microchip
Technology Incorporated in the U.S.A.
Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, BodyCom,
CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM,
dsPICDEM.net, Dynamic Average Matching, DAM, ECAN, EtherGREEN, In-Circuit Serial Programming,
ICSP, INICnet, Inter-Chip Connectivity, JitterBlocker, KleerNet, KleerNet logo, memBrain, Mindi, MiWi,
motorBench, MPASM, MPF, MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient
Code Generation, PICDEM, PICDEM.net, PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE,
Ripple Blocker, SAM-ICE, Serial Quad I/O, SMART-I.S., SQI, SuperSwitcher, SuperSwitcher II, Total
Endurance, TSHARC, USBCheck, VariSense, ViewSpan, WiperLock, Wireless DNA, and ZENA are
trademarks of Microchip Technology Incorporated in the U.S.A. and other countries.
SQTP is a service mark of Microchip Technology Incorporated in the U.S.A.
Silicon Storage Technology is a registered trademark of Microchip Technology Inc. in other countries.
GestIC is a registered trademark of Microchip Technology Germany II GmbH & Co. KG, a subsidiary of
Microchip Technology Inc., in other countries.
All other trademarks mentioned herein are property of their respective companies.
© 2019 Microchip Technology Inc. DS00003049A-page 48
AN3049
© 2019, Microchip Technology Incorporated, Printed in the U.S.A., All Rights Reserved.
ISBN: 978-1-5224-4506-7
Quality Management System Certified by DNV
ISO/TS 16949
Microchip received ISO/TS-16949:2009 certification for its worldwide headquarters, design and wafer
fabrication facilities in Chandler and Tempe, Arizona; Gresham, Oregon and design centers in California
and India. The Company’s quality system processes and procedures are for its PIC® MCUs and dsPIC®
DSCs, KEELOQ® code hopping devices, Serial EEPROMs, microperipherals, nonvolatile memory and
analog products. In addition, Microchip’s quality system for the design and manufacture of development
systems is ISO 9001:2000 certified.
© 2019 Microchip Technology Inc. DS00003049A-page 49
Worldwide Sales and Service
AMERICAS ASIA/PACIFIC ASIA/PACIFIC EUROPE
Corporate Office Australia - Sydney India - Bangalore Austria - Wels
2355 West Chandler Blvd. Tel: 61-2-9868-6733 Tel: 91-80-3090-4444 Tel: 43-7242-2244-39
Chandler, AZ 85224-6199 China - Beijing India - New Delhi Fax: 43-7242-2244-393
Tel: 480-792-7200 Tel: 86-10-8569-7000 Tel: 91-11-4160-8631 Denmark - Copenhagen
Fax: 480-792-7277 China - Chengdu India - Pune Tel: 45-4450-2828
Technical Support: Tel: 86-28-8665-5511 Tel: 91-20-4121-0141 Fax: 45-4485-2829
http://www.microchip.com/ China - Chongqing Japan - Osaka Finland - Espoo
support Tel: 86-23-8980-9588 Tel: 81-6-6152-7160 Tel: 358-9-4520-820
Web Address: China - Dongguan Japan - Tokyo France - Paris
www.microchip.com Tel: 86-769-8702-9880 Tel: 81-3-6880- 3770 Tel: 33-1-69-53-63-20
Atlanta China - Guangzhou Korea - Daegu Fax: 33-1-69-30-90-79
Duluth, GA Tel: 86-20-8755-8029 Tel: 82-53-744-4301 Germany - Garching
Tel: 678-957-9614 China - Hangzhou Korea - Seoul Tel: 49-8931-9700
Fax: 678-957-1455 Tel: 86-571-8792-8115 Tel: 82-2-554-7200 Germany - Haan
Austin, TX China - Hong Kong SAR Malaysia - Kuala Lumpur Tel: 49-2129-3766400
Tel: 512-257-3370 Tel: 852-2943-5100 Tel: 60-3-7651-7906 Germany - Heilbronn
Boston China - Nanjing Malaysia - Penang Tel: 49-7131-67-3636
Westborough, MA Tel: 86-25-8473-2460 Tel: 60-4-227-8870 Germany - Karlsruhe
Tel: 774-760-0087 China - Qingdao Philippines - Manila Tel: 49-721-625370
Fax: 774-760-0088 Tel: 86-532-8502-7355 Tel: 63-2-634-9065 Germany - Munich
Chicago China - Shanghai Singapore Tel: 49-89-627-144-0
Itasca, IL Tel: 86-21-3326-8000 Tel: 65-6334-8870 Fax: 49-89-627-144-44
Tel: 630-285-0071 China - Shenyang Taiwan - Hsin Chu Germany - Rosenheim
Fax: 630-285-0075 Tel: 86-24-2334-2829 Tel: 886-3-577-8366 Tel: 49-8031-354-560
Dallas China - Shenzhen Taiwan - Kaohsiung Israel - Ra’anana
Addison, TX Tel: 86-755-8864-2200 Tel: 886-7-213-7830 Tel: 972-9-744-7705
Tel: 972-818-7423 China - Suzhou Taiwan - Taipei Italy - Milan
Fax: 972-818-2924 Tel: 86-186-6233-1526 Tel: 886-2-2508-8600 Tel: 39-0331-742611
Detroit China - Wuhan Thailand - Bangkok Fax: 39-0331-466781
Novi, MI Tel: 86-27-5980-5300 Tel: 66-2-694-1351 Italy - Padova
Tel: 248-848-4000 China - Xian Vietnam - Ho Chi Minh Tel: 39-049-7625286
Houston, TX Tel: 86-29-8833-7252 Tel: 84-28-5448-2100 Netherlands - Drunen
Tel: 281-894-5983 China - Xiamen Tel: 31-416-690399
Indianapolis Tel: 86-592-2388138 Fax: 31-416-690340
Noblesville, IN China - Zhuhai Norway - Trondheim
Tel: 317-773-8323 Tel: 86-756-3210040 Tel: 47-72884388
Fax: 317-773-5453 Poland - Warsaw
Tel: 317-536-2380 Tel: 48-22-3325737
Los Angeles Romania - Bucharest
Mission Viejo, CA Tel: 40-21-407-87-50
Tel: 949-462-9523 Spain - Madrid
Fax: 949-462-9608 Tel: 34-91-708-08-90
Tel: 951-273-7800 Fax: 34-91-708-08-91
Raleigh, NC Sweden - Gothenberg
Tel: 919-844-7510 Tel: 46-31-704-60-40
New York, NY Sweden - Stockholm
Tel: 631-435-6000 Tel: 46-8-5090-4654
San Jose, CA UK - Wokingham
Tel: 408-735-9110 Tel: 44-118-921-5800
Tel: 408-436-4270 Fax: 44-118-921-5820
Canada - Toronto
Tel: 905-695-1980
Fax: 905-695-2078
© 2019 Microchip Technology Inc. DS00003049A-page 50
You might also like
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- 71M6513/71M6513H 3-Phase Energy Meter IC: Data SheetDocument104 pages71M6513/71M6513H 3-Phase Energy Meter IC: Data Sheetbg632707No ratings yet
- lp2275wDocument87 pageslp2275wrudimalakutNo ratings yet
- Digital Power Electronics and ApplicationsFrom EverandDigital Power Electronics and ApplicationsRating: 3.5 out of 5 stars3.5/5 (3)
- Komatsu Forklift Manuals and DiagramsDocument87 pagesKomatsu Forklift Manuals and DiagramsVrshtyr0% (1)
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Zigbee Based Speed ControlDocument68 pagesZigbee Based Speed Controlbvkarthik2711No ratings yet
- 57-Rtc Based Pump SwitcherDocument2 pages57-Rtc Based Pump Switchersathish24052015No ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- Monitor HP f1703Document54 pagesMonitor HP f1703kinoadams100% (1)
- Operating Mannual of Digital Automatic Voltage Regulator (Davr)Document31 pagesOperating Mannual of Digital Automatic Voltage Regulator (Davr)ArvindPrasadNo ratings yet
- Digital Multi-Mode PFC + LLC Combo Controller: Product HighlightsDocument38 pagesDigital Multi-Mode PFC + LLC Combo Controller: Product HighlightsAlexNo ratings yet
- BenQ LCD Monitor Spare Parts ListDocument58 pagesBenQ LCD Monitor Spare Parts Listjose gomezNo ratings yet
- AN899 Brushless DC Motor Control Using PIC18FXX31 MCUsDocument26 pagesAN899 Brushless DC Motor Control Using PIC18FXX31 MCUssquelch1No ratings yet
- TMC4671-LA Datasheet Rev2.07Document153 pagesTMC4671-LA Datasheet Rev2.07santhosha rkNo ratings yet
- Dsaud0069147 PDFDocument89 pagesDsaud0069147 PDFPablo Pereda GonzalesNo ratings yet
- 71M6513/71M6513H 3-Phase Energy Meter IC: Data SheetDocument95 pages71M6513/71M6513H 3-Phase Energy Meter IC: Data SheetUmer AdnanNo ratings yet
- Monitor AOC Mod LM729 Manual de Servià oDocument61 pagesMonitor AOC Mod LM729 Manual de Servià oapi-3703813100% (2)
- ICL88xx Flyback Design Guide: DG - 2103 - PL39 - 2104 - 160011Document64 pagesICL88xx Flyback Design Guide: DG - 2103 - PL39 - 2104 - 160011Michael WeirichNo ratings yet
- Sensorless Trapezoidal Control of BLDC Motors: Application ReportDocument41 pagesSensorless Trapezoidal Control of BLDC Motors: Application Reportchatty85No ratings yet
- 打開「TMC4671-LA datasheet rev2.06」Document152 pages打開「TMC4671-LA datasheet rev2.06」rockerpornstarNo ratings yet
- MLX16201-MelexisMicroelectronicSystemsDocument25 pagesMLX16201-MelexisMicroelectronicSystemsboirxNo ratings yet
- Getting Started With PWM Using CCP On PIC18 DS90003270ADocument23 pagesGetting Started With PWM Using CCP On PIC18 DS90003270Arahimbencheikh12No ratings yet
- Arm Cortex (LPC 2148) Based Motor Speed ControlDocument72 pagesArm Cortex (LPC 2148) Based Motor Speed ControlUday Wankar100% (2)
- REN an-CM-314 AC-AC Automatic Voltage Regulator APN 20210928 1Document15 pagesREN an-CM-314 AC-AC Automatic Voltage Regulator APN 20210928 1vidalvis avila castillaNo ratings yet
- MC68HC908SR12 V5 0Document404 pagesMC68HC908SR12 V5 0LuchazoNo ratings yet
- Attiny 13 Datasheet PDFDocument169 pagesAttiny 13 Datasheet PDFTed SunNo ratings yet
- TB3155 Multiphase Interleaved PWM Controller With Diode Emulation DS90003155BDocument14 pagesTB3155 Multiphase Interleaved PWM Controller With Diode Emulation DS90003155BJune Anthony AsistioNo ratings yet
- Volume 1 PDFDocument301 pagesVolume 1 PDFNaresh Pattanaik100% (1)
- BLDCDEMOUG Rev6Document23 pagesBLDCDEMOUG Rev6Hoang Nguyen HuyNo ratings yet
- Group 20 BLDC Motor 20192247 20192218 20192211Document31 pagesGroup 20 BLDC Motor 20192247 20192218 20192211Geralt VesemirNo ratings yet
- PIC BLE Hardware User Guide DS50002963BDocument31 pagesPIC BLE Hardware User Guide DS50002963BMundo da CriatividadeNo ratings yet
- XDPL8221 Digital PFC+Flyback Controller ICDocument57 pagesXDPL8221 Digital PFC+Flyback Controller ICzuffflor_925748656No ratings yet
- 2 Technical Course Vol2Document281 pages2 Technical Course Vol2Electrifying GuyNo ratings yet
- MC68HC908GR8B PDFDocument260 pagesMC68HC908GR8B PDFalexNo ratings yet
- 00001556B PDFDocument12 pages00001556B PDFPiero Raurau100% (1)
- Controlling A Brushed DC Motor With An ST6265C or ST6260C MCU-CD00003822Document14 pagesControlling A Brushed DC Motor With An ST6265C or ST6260C MCU-CD00003822dcesentherNo ratings yet
- PFC Boost Calculation TI PDFDocument15 pagesPFC Boost Calculation TI PDFshawn liNo ratings yet
- Supraja DocumentDocument73 pagesSupraja DocumentAnonymous gWVMMa588pNo ratings yet
- DWG PDFDocument200 pagesDWG PDFAnkitNo ratings yet
- Training Material PCS SystemDocument28 pagesTraining Material PCS SystemAlif PrayogaNo ratings yet
- MPC 5565 PDFDocument54 pagesMPC 5565 PDFvarimasrNo ratings yet
- User Manual: HGM6510 Genset Parallel UnitDocument52 pagesUser Manual: HGM6510 Genset Parallel Unitnhocti007No ratings yet
- IRMCF341: Sensorless Motor Control IC For AppliancesDocument32 pagesIRMCF341: Sensorless Motor Control IC For AppliancesAbid ali SiddiquiNo ratings yet
- Atmel 8-Bit AVR Microcontroller With 512/1024 Bytes In-System Programmable FlashDocument170 pagesAtmel 8-Bit AVR Microcontroller With 512/1024 Bytes In-System Programmable Flashlumix345-web1802No ratings yet
- Transformer Protection From Over PDFDocument79 pagesTransformer Protection From Over PDFgiatus mwizarubiNo ratings yet
- Spy RobotDocument74 pagesSpy Robotjanakiram473No ratings yet
- Irmck341 PDFDocument36 pagesIrmck341 PDFravy_01No ratings yet
- Manual Service 32LC821F PDFDocument50 pagesManual Service 32LC821F PDFies837No ratings yet
- QET Motor TrainerDocument13 pagesQET Motor TrainerKadek Suwar DharmaNo ratings yet
- Power Plant Controller Manual Specification and LogicDocument13 pagesPower Plant Controller Manual Specification and Logicsouvikbesu89No ratings yet
- GTP, QAP & Drawing of InverterDocument66 pagesGTP, QAP & Drawing of InverterChandan ChakmaNo ratings yet
- Speed control of BLDC Motor using IPM and Micro 2812Document41 pagesSpeed control of BLDC Motor using IPM and Micro 2812subbanna100% (1)
- Report Ver 2Document44 pagesReport Ver 2Geralt VesemirNo ratings yet
- VE Commercial ProjectDocument25 pagesVE Commercial ProjectKunwar ShaileshNo ratings yet
- ABB Schalt-Und SteuerungstechnikDocument17 pagesABB Schalt-Und SteuerungstechnikfathazamNo ratings yet
- PIC16C72ADocument122 pagesPIC16C72AsafsaNo ratings yet
- Monarch Nice 3000 PDFDocument98 pagesMonarch Nice 3000 PDFJavier Martínez100% (6)
- First Page PDFDocument1 pageFirst Page PDFAli ErNo ratings yet
- Modeling DC MotorsDocument28 pagesModeling DC MotorsAli ErNo ratings yet
- IJEIT05201607Document9 pagesIJEIT05201607Ali ErNo ratings yet
- Modeling DC MotorsDocument28 pagesModeling DC MotorsAli ErNo ratings yet
- First Page PDFDocument1 pageFirst Page PDFAli ErNo ratings yet
- MIPRO2014final 1Document7 pagesMIPRO2014final 1Ali ErNo ratings yet
- Megahertz High Voltage Pulse Generator Suitable For Capacitive LoadDocument7 pagesMegahertz High Voltage Pulse Generator Suitable For Capacitive LoadAli ErNo ratings yet
- ITS Management': AugustDocument136 pagesITS Management': AugustAli ErNo ratings yet
- Jeong2015 PDFDocument4 pagesJeong2015 PDFAli ErNo ratings yet
- ST Motor Controller 1878Document22 pagesST Motor Controller 1878Ali ErNo ratings yet
- MOSFET-based High Voltage Short Pulse Generator For Ultrasonic Transducer ExcitationDocument8 pagesMOSFET-based High Voltage Short Pulse Generator For Ultrasonic Transducer ExcitationAli ErNo ratings yet
- Design and Implementation of A Low-Power Intensity Pulsed-Ultrasound Generator For Dental Tissue RegenerationDocument4 pagesDesign and Implementation of A Low-Power Intensity Pulsed-Ultrasound Generator For Dental Tissue RegenerationAli ErNo ratings yet
- VPT Umbilical StudiesDocument12 pagesVPT Umbilical StudiesAli ErNo ratings yet
- Jeong2015 PDFDocument4 pagesJeong2015 PDFAli ErNo ratings yet
- Optical Fiber CommunicationDocument21 pagesOptical Fiber CommunicationKaranDhamijaNo ratings yet
- Keith Billings June 2003 PETDocument2 pagesKeith Billings June 2003 PETNikhil PoojariNo ratings yet
- NDA Agreement for Sino Grand Wall International ContractingDocument2 pagesNDA Agreement for Sino Grand Wall International ContractingAhmed ZainNo ratings yet
- GATIDocument22 pagesGATIchetana jainNo ratings yet
- CSS Position: What Is Document Normal Flow?Document20 pagesCSS Position: What Is Document Normal Flow?dorian451No ratings yet
- Document-SAP EWM For Fashion 1.0: 1.general IntroductionDocument3 pagesDocument-SAP EWM For Fashion 1.0: 1.general IntroductionAnonymous u3PhTjWZRNo ratings yet
- Metal Oxide Film Resistors GuideDocument2 pagesMetal Oxide Film Resistors GuidekgskgmNo ratings yet
- What Is Bug Bounty HuntingDocument36 pagesWhat Is Bug Bounty HuntingnetskyonNo ratings yet
- FDocument3 pagesFhasanatul alawiyahNo ratings yet
- RTG 005 DataDocument2 pagesRTG 005 Datarakesh0072No ratings yet
- Online Shopping Interactivity ActionsDocument3 pagesOnline Shopping Interactivity ActionsRachel Santos100% (1)
- Michael B. White - Mastering C - (C Sharp Programming) - A Step by Step Guide For The Beginner, Intermediate and Advanced User, Including Projects and Exercises (2019) - Libgen - LiDocument522 pagesMichael B. White - Mastering C - (C Sharp Programming) - A Step by Step Guide For The Beginner, Intermediate and Advanced User, Including Projects and Exercises (2019) - Libgen - LiMartha Mattena100% (1)
- Prash Robotics UpdatedDocument152 pagesPrash Robotics Updatedpreethu02No ratings yet
- BU 0950 - en TIA Standard Modules: Supplementary Manual Options For NORD - Frequency InvertersDocument48 pagesBU 0950 - en TIA Standard Modules: Supplementary Manual Options For NORD - Frequency InvertersRoberto BarranquillaNo ratings yet
- Assignment 1 - Ex 4.39: Olamide Gab-Opadokun 2/10/2020Document3 pagesAssignment 1 - Ex 4.39: Olamide Gab-Opadokun 2/10/2020Olamide GabNo ratings yet
- Administration Guide: Public 2023-11-25Document454 pagesAdministration Guide: Public 2023-11-25elisette.guittetNo ratings yet
- Principal and Working of Optical FiberDocument8 pagesPrincipal and Working of Optical FiberminigamingindoNo ratings yet
- Icpna Cusco HomeworkDocument4 pagesIcpna Cusco Homeworkzoldoiwlf100% (1)
- 4-LINE DISPLAY MODULE TITLEDocument15 pages4-LINE DISPLAY MODULE TITLEOneil ZárateNo ratings yet
- Optimization of Box Section for Double Beam Bridge Crane GirderDocument8 pagesOptimization of Box Section for Double Beam Bridge Crane GirderSomi Khan100% (2)
- 20 Changes in The FIDIC 2017 Editions From A Claims Perspective - Claims ClassDocument7 pages20 Changes in The FIDIC 2017 Editions From A Claims Perspective - Claims ClassAnonymous fMgsG0GQVHNo ratings yet
- Escape The Rat RaceDocument7 pagesEscape The Rat RaceLawrence SykesNo ratings yet
- Creating OWASP ZAP Extensions and Add-Ons: Johanna CurielDocument20 pagesCreating OWASP ZAP Extensions and Add-Ons: Johanna CurielSabit IncomarNo ratings yet
- Panou Repetor Syncro View k67750m1Document2 pagesPanou Repetor Syncro View k67750m1dorobantu_alexandruNo ratings yet
- 63-9276 Rev C VLP-16 Application Note - Packet Structure Timing DefinitionDocument23 pages63-9276 Rev C VLP-16 Application Note - Packet Structure Timing DefinitionJuan David Valenciano ClarosNo ratings yet
- 8047 en 03Document84 pages8047 en 03José CarlosNo ratings yet
- RM RM: MB Ram BitDocument2 pagesRM RM: MB Ram BitCikgu AlNo ratings yet
- Project #2 - B+Tree - CMU 15-445 - 645 - Intro To Database Systems (Fall 2017)Document1 pageProject #2 - B+Tree - CMU 15-445 - 645 - Intro To Database Systems (Fall 2017)alucardchaNo ratings yet
- Hard Sudoku TitlesDocument30 pagesHard Sudoku TitlesnikkyjNo ratings yet
- IV Cse-D Seminar FormatDocument8 pagesIV Cse-D Seminar FormatPenchalaiah NarasapuramNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Power Quality in Power Systems and Electrical MachinesFrom EverandPower Quality in Power Systems and Electrical MachinesRating: 4.5 out of 5 stars4.5/5 (11)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Foundations of Western Civilization II: A History of the Modern Western World (Transcript)From EverandFoundations of Western Civilization II: A History of the Modern Western World (Transcript)Rating: 4.5 out of 5 stars4.5/5 (12)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessFrom EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessNo ratings yet
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)