You might also like
- (15200477 - Bulletin of The American Meteorological Society) The Operational GOES Infrared Rainfall Estimation TechniqueDocument16 pages(15200477 - Bulletin of The American Meteorological Society) The Operational GOES Infrared Rainfall Estimation TechniqueMatheus FonsecaNo ratings yet
- Multi-Source Precipitation Data Merging For Heavy Rainfall Events Based On Cokriging and Machine Learning MethodsDocument23 pagesMulti-Source Precipitation Data Merging For Heavy Rainfall Events Based On Cokriging and Machine Learning Methodsvân NamNo ratings yet
- Algorithms 11 00132 PDFDocument11 pagesAlgorithms 11 00132 PDFnos88No ratings yet
- The Goddard Profiling Algorithm (GPROF) : Description and Current ApplicationsDocument15 pagesThe Goddard Profiling Algorithm (GPROF) : Description and Current ApplicationsBen GorrNo ratings yet
- IrradiaçãoDocument9 pagesIrradiaçãoFernando LimaNo ratings yet
- 20202579029-Angie Moreno (Comparación de Modelos de Regresión y Redes Neuronales para Estimar La Radiación Solar)Document8 pages20202579029-Angie Moreno (Comparación de Modelos de Regresión y Redes Neuronales para Estimar La Radiación Solar)Angie MorenoNo ratings yet
- Remote Sensing: Deep Learning For Precipitation Estimation From Satellite and Rain Gauges MeasurementsDocument22 pagesRemote Sensing: Deep Learning For Precipitation Estimation From Satellite and Rain Gauges MeasurementsdadaNo ratings yet
- Prediction Rainfall With Regression AnalysisDocument12 pagesPrediction Rainfall With Regression AnalysisIJRASETPublications100% (1)
- Problem DefinitionDocument4 pagesProblem Definitionusha100% (1)
- 1 s2.0 S2666827021000190 MainDocument17 pages1 s2.0 S2666827021000190 MainEmirhan YılmazNo ratings yet
- Incertezas en El TRMMDocument14 pagesIncertezas en El TRMMRaul TyvNo ratings yet
- Water 12 01906 v2Document19 pagesWater 12 01906 v2DRACO SpadileNo ratings yet
- 1 s2.0 S2090447922000508 Main PDFDocument13 pages1 s2.0 S2090447922000508 Main PDFBerihunMmanayeNo ratings yet
- Hess 21 1295 2017Document26 pagesHess 21 1295 2017sandraNo ratings yet
- Estimating Summertime Precipitation From Himawari-8 and Global Forecast System Based On Machine LearningDocument14 pagesEstimating Summertime Precipitation From Himawari-8 and Global Forecast System Based On Machine LearningducksgomooNo ratings yet
- Shi 2017Document14 pagesShi 2017ska51No ratings yet
- A Review of Weather Forecasting Using Data Mining TechniquesDocument5 pagesA Review of Weather Forecasting Using Data Mining TechniquesSARATH KISHORE . R 16BCS026No ratings yet
- Remotesensing 12 03135 v2Document23 pagesRemotesensing 12 03135 v2ngocttdNo ratings yet
- Remotesensing 11 00190Document5 pagesRemotesensing 11 00190cbuuwfbuwebfwiNo ratings yet
- PDF Conf p61 s4 04 Kidd VDocument5 pagesPDF Conf p61 s4 04 Kidd VAyan SantraNo ratings yet
- ESDRERRSelectionsDocument18 pagesESDRERRSelectionsKoert OosterhuisNo ratings yet
- Analisis Perbandingan Kehandalan Data Hujan Gsmap, TRMM, GPM Dan Persiann Terhadap Data Obsevasi Dalam Rentang Waktu Penelitian 2020-2021Document9 pagesAnalisis Perbandingan Kehandalan Data Hujan Gsmap, TRMM, GPM Dan Persiann Terhadap Data Obsevasi Dalam Rentang Waktu Penelitian 2020-2021Putri PrabandariNo ratings yet
- Machine Learning Methods To Weather Forecasting To Predict Apparent TemperatureDocument11 pagesMachine Learning Methods To Weather Forecasting To Predict Apparent TemperatureIJRASETPublications100% (1)
- Lightning Data AssmilationDocument16 pagesLightning Data AssmilationBIJIT KUMAR BANERJEENo ratings yet
- (Energy Procedia Vol. 57) Vernay, Christophe - Pitaval, Sébastien - Blanc, Philippe - Review of Satellite-Based SDocument9 pages(Energy Procedia Vol. 57) Vernay, Christophe - Pitaval, Sébastien - Blanc, Philippe - Review of Satellite-Based SMaxime SEHOUNo ratings yet
- Metodlogia LluviaDocument12 pagesMetodlogia LluviaJorge GonzalezNo ratings yet
- Tipos de ChuvaDocument10 pagesTipos de ChuvaLillian AnjosNo ratings yet
- JGR Solid Earth - 2018 - Anantrasirichai - Application of Machine Learning To Classification of Volcanic Deformation inDocument15 pagesJGR Solid Earth - 2018 - Anantrasirichai - Application of Machine Learning To Classification of Volcanic Deformation insen duNo ratings yet
- Precipitation Retrieval From Space An Overview - 2010 - Comptes Rendus GeoscienceDocument10 pagesPrecipitation Retrieval From Space An Overview - 2010 - Comptes Rendus GeoscienceFabio HochleitnerNo ratings yet
- (J) Spaceborne GNSS - R Retrieving On Global Soil Moisture ApproachedDocument6 pages(J) Spaceborne GNSS - R Retrieving On Global Soil Moisture ApproachedAhmed WasiuNo ratings yet
- Research ArticleDocument13 pagesResearch ArticleskNo ratings yet
- K 1 PDFDocument2 pagesK 1 PDFKosikee A. IwuohaNo ratings yet
- Chapter-1: REMOTE Sensing Techniques Provide End Users With Evergrowing Volumes of DataDocument40 pagesChapter-1: REMOTE Sensing Techniques Provide End Users With Evergrowing Volumes of Dataprince395No ratings yet
- NowcastingDocument16 pagesNowcastingVinh Ha LongNo ratings yet
- Assessing U-Net Model Performance in Weather Radar-BasedPrecipitation Nowcasting A Reflectivity Threshold AnalysisDocument12 pagesAssessing U-Net Model Performance in Weather Radar-BasedPrecipitation Nowcasting A Reflectivity Threshold Analysisdejanira dejaNo ratings yet
- A Research On Mineral Exploration Using GIS and Remote SensingDocument33 pagesA Research On Mineral Exploration Using GIS and Remote SensingHrishi BhardwajNo ratings yet
- Monta Natasha Ges Assignment 2022Document5 pagesMonta Natasha Ges Assignment 2022Francis MbeweNo ratings yet
- Solar Radiation Prediction For Dimensioning Photovoltaic Systems Using Artificial Neural NetworksDocument9 pagesSolar Radiation Prediction For Dimensioning Photovoltaic Systems Using Artificial Neural NetworksfloraNo ratings yet
- AYBAR Et Al. 2019 - Construction High-Res Gridded Rainfall Dataset For Peru From 1981 To The Present DayDocument17 pagesAYBAR Et Al. 2019 - Construction High-Res Gridded Rainfall Dataset For Peru From 1981 To The Present DayFabian DrenkhanNo ratings yet
- Estimation of Convective Rainfall From Lightning ObservationsDocument13 pagesEstimation of Convective Rainfall From Lightning ObservationsAnna Theresa SiahaanNo ratings yet
- 1stDeepStructWS Paper 2Document4 pages1stDeepStructWS Paper 2manish singhNo ratings yet
- (15257541 - Journal of Hydrometeorology) The Version-2 Global Precipitation Climatology Project (GPCP) Monthly Precipitation Analysis (1979-Present)Document21 pages(15257541 - Journal of Hydrometeorology) The Version-2 Global Precipitation Climatology Project (GPCP) Monthly Precipitation Analysis (1979-Present)lbarretoNo ratings yet
- Soil Moisture Retrieval Using Convolutional Neural Networks: Application To Passive Microwave Remote SensingDocument4 pagesSoil Moisture Retrieval Using Convolutional Neural Networks: Application To Passive Microwave Remote SensingasdNo ratings yet
- Uncertainty of Flood ForecastingDocument13 pagesUncertainty of Flood ForecastingIsabela BalanNo ratings yet
- Inflow Simulation For Dam OperationsDocument6 pagesInflow Simulation For Dam OperationsJamesBourneNo ratings yet
- Remotesensing 11 02302 v3Document24 pagesRemotesensing 11 02302 v3Md CassimNo ratings yet
- Error Assessment of Solar Irradiance Forecasts and AC Power From Energy Conversion Model in Grid-Connected Photovoltaic SystemsDocument27 pagesError Assessment of Solar Irradiance Forecasts and AC Power From Energy Conversion Model in Grid-Connected Photovoltaic Systemsmohd hazimNo ratings yet
- IdfDocument11 pagesIdfBernard PalmerNo ratings yet
- (IJCST-V10I4P18) :fatima Ibrahim Abdelmoutalib, Dieter FritschDocument10 pages(IJCST-V10I4P18) :fatima Ibrahim Abdelmoutalib, Dieter FritschEighthSenseGroupNo ratings yet
- Toward The Removal of Model Dependency in Soil Moisture Climate Data RecordsDocument18 pagesToward The Removal of Model Dependency in Soil Moisture Climate Data RecordsMercedes SalviaNo ratings yet
- IJRET - Supervised Machine Learning Based Dynamic Estimation of Bulk Soil Moisture Using Cosmic Ray SensorDocument6 pagesIJRET - Supervised Machine Learning Based Dynamic Estimation of Bulk Soil Moisture Using Cosmic Ray SensorInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Comparison of Short-Term Rainfall Prediction Models For Real-Time Flood ForecastingDocument16 pagesComparison of Short-Term Rainfall Prediction Models For Real-Time Flood ForecastingukoszapavlinjeNo ratings yet
- Research Paper On Microwave Remote SensingDocument8 pagesResearch Paper On Microwave Remote Sensingaflbsjnbb100% (1)
- (15200434 - Weather and Forecasting) Application of The WRF-LETKF Data Assimilation System Over Southern South America - Sensitivity To Model PhysicsDocument20 pages(15200434 - Weather and Forecasting) Application of The WRF-LETKF Data Assimilation System Over Southern South America - Sensitivity To Model PhysicsĐô ĐôNo ratings yet
- Worldwide Continuous Gap-Filled MODISDocument10 pagesWorldwide Continuous Gap-Filled MODISGeoMathCenterNo ratings yet
- Sensors: Cellular Simulation For Distributed Sensing Over Complex TerrainsDocument30 pagesSensors: Cellular Simulation For Distributed Sensing Over Complex Terrainstptuyen2246No ratings yet
- Stochastic Approach To A Rain Attenuation Time SerDocument8 pagesStochastic Approach To A Rain Attenuation Time SerNguyễn Xuân ThắngNo ratings yet
- Isprsannals II 5 289 2014Document7 pagesIsprsannals II 5 289 2014Iván PuenteNo ratings yet
- Deep Learning Neural Networks Trained With MODISDocument39 pagesDeep Learning Neural Networks Trained With MODISGeoMathCenterNo ratings yet
- Weather Analysis and Forecasting: Applying Satellite Water Vapor Imagery and Potential Vorticity AnalysisFrom EverandWeather Analysis and Forecasting: Applying Satellite Water Vapor Imagery and Potential Vorticity AnalysisNo ratings yet
- NM-238 GBDocument27 pagesNM-238 GBShania GintingNo ratings yet
- 95-113022 Na en FR r4 Hydrim c61w g4 Operator ManualDocument81 pages95-113022 Na en FR r4 Hydrim c61w g4 Operator ManualjoeltrondotcomNo ratings yet
- Report Text: Silmi Hayati PutriDocument8 pagesReport Text: Silmi Hayati PutriSilmi Hayati PutriNo ratings yet
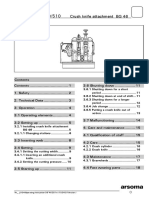
- Crush Knife Attachment - BG46Document19 pagesCrush Knife Attachment - BG46DeniMestiWidiantoNo ratings yet
- CPJ 200 J1 j1-04 Basic Operationmod r2 (SMD) - 1Document20 pagesCPJ 200 J1 j1-04 Basic Operationmod r2 (SMD) - 1ngocbienk56No ratings yet
- Statistics Jeopardy SlidesDocument26 pagesStatistics Jeopardy SlidesMarccello 'Pasquale PaganoNo ratings yet
- Magazine: Mcneel'S FL Ying CircusDocument36 pagesMagazine: Mcneel'S FL Ying CircusNoureddine SemaraNo ratings yet
- Mobile TestingDocument2 pagesMobile Testingvishalsuman4uNo ratings yet
- Labview Ecg AdquisicionDocument6 pagesLabview Ecg AdquisicionBAUTISTA ENCISO LEEVAN YACKIENo ratings yet
- Aplikasi Alat Ukur Indeks Massa Tubuh Untuk Evaluasi Gizi Balita Berbasis AndroidDocument5 pagesAplikasi Alat Ukur Indeks Massa Tubuh Untuk Evaluasi Gizi Balita Berbasis Androidsri lestariNo ratings yet
- My Daily Routine UNIT 3Document5 pagesMy Daily Routine UNIT 3Francisco EricesNo ratings yet
- Unit4: Adapted Collider (LHC) Is The Largest Acce Erator and Collides Particle Beams On Questions ofDocument2 pagesUnit4: Adapted Collider (LHC) Is The Largest Acce Erator and Collides Particle Beams On Questions ofThắm NguyễnNo ratings yet
- Example of Array List Using Object Stud With Data Type StudentDocument3 pagesExample of Array List Using Object Stud With Data Type StudentNurul AinniNo ratings yet
- Sharp J. Exam Ref AI-900 Microsoft Azure AI Fundamentals 2022 PDFDocument366 pagesSharp J. Exam Ref AI-900 Microsoft Azure AI Fundamentals 2022 PDFKoos SerfonteinNo ratings yet
- Hungarian Algorithm For Solving The Assignment ProblemDocument10 pagesHungarian Algorithm For Solving The Assignment ProblemRavi GohelNo ratings yet
- MU155 Test 2Document4 pagesMU155 Test 2Ria AnggrainiNo ratings yet
- 1001 Solved Electrical Engineering ProblemsDocument798 pages1001 Solved Electrical Engineering ProblemsHero Cordova de Guzman95% (20)
- Sample WorkDocument5 pagesSample WorkJane Del RosarioNo ratings yet
- NSR-3652 Series of Synchronizer User's Manual -V1.10 - 20180510【M2018004】 - BelarusDocument54 pagesNSR-3652 Series of Synchronizer User's Manual -V1.10 - 20180510【M2018004】 - BelarusАлександр КозловNo ratings yet
- A Quick Tour of UK Census DataDocument22 pagesA Quick Tour of UK Census DataDave RawnsleyNo ratings yet
- Compal Confidential: Dali & Astro BKA40/BKA50/BKD40/BKD50 MB Schematic Document LA-D822PDocument46 pagesCompal Confidential: Dali & Astro BKA40/BKA50/BKD40/BKD50 MB Schematic Document LA-D822PPhạm CườngNo ratings yet
- Profile - National Car RentalDocument1 pageProfile - National Car RentalPedro Filipe CunhaNo ratings yet
- Elimination MethodsDocument58 pagesElimination MethodsmanankNo ratings yet
- MFG MANUAL 003 Manufacturing Documentation SampleDocument2 pagesMFG MANUAL 003 Manufacturing Documentation SampleSutha Tamil NambeNo ratings yet
- IJAEMAPAPERDOCDocument12 pagesIJAEMAPAPERDOCGopikaNo ratings yet
- CS103 Syllabus: Date Topics Readings Assignments M January 8Document3 pagesCS103 Syllabus: Date Topics Readings Assignments M January 8Dupla PaltaNo ratings yet
- Valaris Exl I: Capacities Primary Rig CharacteristicsDocument1 pageValaris Exl I: Capacities Primary Rig Characteristicsmelody04223No ratings yet
- FRP 1543494499564 - Grating Brochure - 2018Document6 pagesFRP 1543494499564 - Grating Brochure - 2018Ganesh KumarNo ratings yet
- FTTH-ODN - Optical Fiber Networks Fundamentals (Part 3)Document39 pagesFTTH-ODN - Optical Fiber Networks Fundamentals (Part 3)Mohamed ShabanaNo ratings yet
- MFL71143102 - ManualOwner - (EN+SP) - LW1019IVSM - Rev 02 - 111919 - (P12816-18202123)Document60 pagesMFL71143102 - ManualOwner - (EN+SP) - LW1019IVSM - Rev 02 - 111919 - (P12816-18202123)julio ariasNo ratings yet