You might also like
- Design and Operation of Human Locomotion SystemsFrom EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNo ratings yet
- Sheath CurrentsDocument5 pagesSheath Currentsscribdkkk100% (1)
- Factors, Impact, Symptoms of NPADocument7 pagesFactors, Impact, Symptoms of NPAMahesh ChandankarNo ratings yet
- Intermolecular Forces Lesson PlanDocument34 pagesIntermolecular Forces Lesson Planapi-442754652No ratings yet
- Active Above-Knee Prosthesis: A Guide to a Smart Prosthetic LegFrom EverandActive Above-Knee Prosthesis: A Guide to a Smart Prosthetic LegNo ratings yet
- By Pass System in The Dry ProcessDocument34 pagesBy Pass System in The Dry Processfaheemqc100% (1)
- NURS 366 Exam 1 Study Guide and RubricDocument7 pagesNURS 366 Exam 1 Study Guide and RubriccmpNo ratings yet
- Robotic ADocument8 pagesRobotic Abedo39No ratings yet
- PCL Project Report PDFDocument19 pagesPCL Project Report PDFAkhil vNo ratings yet
- Walking Movement in RobotDocument24 pagesWalking Movement in RobotNandy ObNo ratings yet
- Design of a Robotic Leg for Disabled PeopleDocument7 pagesDesign of a Robotic Leg for Disabled Peoplebetelhemterefe wondimagenihuNo ratings yet
- Development of Parallel Manipulator Sit To Stand Assistive Device For Elderly PeopleDocument6 pagesDevelopment of Parallel Manipulator Sit To Stand Assistive Device For Elderly PeopleamitsbhatiNo ratings yet
- Adaptive Oscillator-Based Control For Active Lower-Limb Exoskeleton and Its Metabolic ImpactDocument7 pagesAdaptive Oscillator-Based Control For Active Lower-Limb Exoskeleton and Its Metabolic Impact李磊No ratings yet
- Secure Microprocessor-Controlled Prosthetic Leg For Elderly Amputees: Preliminary ResultsDocument15 pagesSecure Microprocessor-Controlled Prosthetic Leg For Elderly Amputees: Preliminary ResultsNada GhammemNo ratings yet
- Research Paper 1Document6 pagesResearch Paper 1Mankaran SinghNo ratings yet
- Deng 2021 J. Phys. Conf. Ser. 1865 032002Document6 pagesDeng 2021 J. Phys. Conf. Ser. 1865 032002Mohammed RawashdehNo ratings yet
- Efficient and Versatile Locomotion With Highly Compliant LegsDocument3 pagesEfficient and Versatile Locomotion With Highly Compliant LegsNisrina Safira SariNo ratings yet
- RUPERT Wearable Exoskeleton ReviewDocument14 pagesRUPERT Wearable Exoskeleton ReviewindorgNo ratings yet
- Design and Fabrication of Wheelchair Cum Stretcher With Multi FoldDocument9 pagesDesign and Fabrication of Wheelchair Cum Stretcher With Multi FoldYogesh E HegadeNo ratings yet
- Stand On WheelsDocument4 pagesStand On WheelsGRD JournalsNo ratings yet
- Mechanically Operated Wheelchair Convertible Stretcher and Walker Ijariie6974Document6 pagesMechanically Operated Wheelchair Convertible Stretcher and Walker Ijariie6974Ravi Kanth YadavNo ratings yet
- Motorized Wheelchair (Joystick and Head Controlled) : Project OnDocument18 pagesMotorized Wheelchair (Joystick and Head Controlled) : Project OnLokeshRathorNo ratings yet
- Health Assessment LaboratoryDocument3 pagesHealth Assessment Laboratorylow keyNo ratings yet
- Applied SciencesDocument22 pagesApplied SciencesHamrah SiddiquiNo ratings yet
- A Soft Wearable Robotic Ankle-Foot-Orthosis For Post-Stroke PatientsDocument6 pagesA Soft Wearable Robotic Ankle-Foot-Orthosis For Post-Stroke PatientsIsabella Garcia DiazNo ratings yet
- Design Process and Development of A Prototype Electric WheelchairDocument7 pagesDesign Process and Development of A Prototype Electric WheelchairKANAK SHARMANo ratings yet
- Biomechanical Design and Control SK HasanDocument32 pagesBiomechanical Design and Control SK HasanSkHasanNo ratings yet
- Staircase Lift Design For Elderly at HomeDocument19 pagesStaircase Lift Design For Elderly at Homesabareesh91mechNo ratings yet
- Mechatronics in BiomedicineDocument29 pagesMechatronics in Biomedicineangelbasilio2110No ratings yet
- Project 3rd1 PDFDocument50 pagesProject 3rd1 PDFAbdul RaqeebNo ratings yet
- Wheelchair Control by Head Motion: Aleksandar Pajkanović, Branko DokićDocument17 pagesWheelchair Control by Head Motion: Aleksandar Pajkanović, Branko DokićHamed RazaNo ratings yet
- Project Report 1Document26 pagesProject Report 1Safalsha BabuNo ratings yet
- Four-bar linkage chair assists sit-to-stand movementsDocument7 pagesFour-bar linkage chair assists sit-to-stand movementsDbz BoleroNo ratings yet
- New Low-Cost Design of Staircase Climbing Wheelchair'Document7 pagesNew Low-Cost Design of Staircase Climbing Wheelchair'kaushik_ranjan_2No ratings yet
- Design and Development of A Lightweight, High-Torque, and Cost-Effective Hip ExoskeletonDocument6 pagesDesign and Development of A Lightweight, High-Torque, and Cost-Effective Hip ExoskeletonSultan Mahi ZubairNo ratings yet
- Design of A Hybrid WheelDocument8 pagesDesign of A Hybrid WheelAdnan ZafarNo ratings yet
- Wheelchair Cum Stretcher IJERTV6IS100039 PDFDocument5 pagesWheelchair Cum Stretcher IJERTV6IS100039 PDFsinganamala son'sNo ratings yet
- Rehabilitacion Doc InglesDocument6 pagesRehabilitacion Doc InglesISABELLA GUTIERREZ MIERNo ratings yet
- Design and Fabrication of A Voice Controlled Wheelchair For Physically Disabled PeopleDocument10 pagesDesign and Fabrication of A Voice Controlled Wheelchair For Physically Disabled PeopleLendry NormanNo ratings yet
- Active Lower Limb Prosthetics: A Systematic Review of Design Issues and SolutionsDocument15 pagesActive Lower Limb Prosthetics: A Systematic Review of Design Issues and SolutionsAlejandro RosalesNo ratings yet
- Prosthetic Knee SystemsDocument2 pagesProsthetic Knee SystemshppresarioNo ratings yet
- Sensors: A New Controller For A Smart Walker Based On Human-Robot FormationDocument26 pagesSensors: A New Controller For A Smart Walker Based On Human-Robot FormationMariia Paula AriinNo ratings yet
- A New Hand Exoskeleton Device For Rehabilitation Using A Three-Layered Sliding Spring Mechanism PDFDocument6 pagesA New Hand Exoskeleton Device For Rehabilitation Using A Three-Layered Sliding Spring Mechanism PDFGIenlemenNo ratings yet
- R Internship Project Report HONDADocument5 pagesR Internship Project Report HONDAAkshay KhannaNo ratings yet
- The Development and Testing of A Human Machine Interface For A Mobile Medical ExoskeletonDocument6 pagesThe Development and Testing of A Human Machine Interface For A Mobile Medical ExoskeletonArsyad Zanadin RamadhanNo ratings yet
- Automatic Sliding Stair Lift For Senior CitizensspDocument6 pagesAutomatic Sliding Stair Lift For Senior CitizensspAavash NeupaneNo ratings yet
- Review of Motorized Tricycle For The Disabled PersonDocument5 pagesReview of Motorized Tricycle For The Disabled PersonsanjuNo ratings yet
- Stair Climbing Wheelchair For Disabled Person: N.N. Sorate, M.B.SUL, N.B. Malgunde, A.N.KaleDocument4 pagesStair Climbing Wheelchair For Disabled Person: N.N. Sorate, M.B.SUL, N.B. Malgunde, A.N.KaleMuzaffar KhanNo ratings yet
- Design and Fabrication of Tricycle for Physically ChallengedDocument6 pagesDesign and Fabrication of Tricycle for Physically Challengedदेवेश सिंह राजपूतNo ratings yet
- 3.-Smart-Wheelchair-for-Old-and-Disabled-1Document11 pages3.-Smart-Wheelchair-for-Old-and-Disabled-1Bhuvana NNo ratings yet
- 41 Mobile Iot Hand Gesture Based Wheel Chair Movement Control For The Desable Using (Mems Technology)Document3 pages41 Mobile Iot Hand Gesture Based Wheel Chair Movement Control For The Desable Using (Mems Technology)Trex TrexNo ratings yet
- Research Paper On Stair Climbing WheelchairDocument6 pagesResearch Paper On Stair Climbing Wheelchairfzg9e1r9100% (1)
- Project Work 2nd ReviewDocument18 pagesProject Work 2nd ReviewRavi AnuNo ratings yet
- FYDP#Group FDocument20 pagesFYDP#Group Fitezaz ahmedNo ratings yet
- Chapter 1Document4 pagesChapter 1Rizwan Masood MughalNo ratings yet
- (1-5) CE GESTURE CONTROLLED WHEELCHAIR-formatDocument5 pages(1-5) CE GESTURE CONTROLLED WHEELCHAIR-formatAKHILNo ratings yet
- OslDocument26 pagesOslNezha MabroukNo ratings yet
- RoboticsDocument29 pagesRoboticsnorshadiaNo ratings yet
- IJREISS_4094_95410Document13 pagesIJREISS_4094_95410ivs yeswanthNo ratings yet
- The Smart Wheelchair Component SystemDocument14 pagesThe Smart Wheelchair Component SystemHet PatelNo ratings yet
- Preliminary Development of A Robotic Hip-Knee Exoskeleton With 3dprinted Backdrivable ActuatorsDocument7 pagesPreliminary Development of A Robotic Hip-Knee Exoskeleton With 3dprinted Backdrivable Actuatorsalyssia.adiaNo ratings yet
- Example 2Document7 pagesExample 2oguzhankarasu78No ratings yet
- Design Issues and Applications For A Passive-Dynamic WalkerDocument16 pagesDesign Issues and Applications For A Passive-Dynamic WalkerYogeshTakNo ratings yet
- A Prototype of Electric Wheelchair Controlled by Eye-Only For Paralyzed UserDocument2 pagesA Prototype of Electric Wheelchair Controlled by Eye-Only For Paralyzed UserQazi KamalNo ratings yet
- Biodiesel Using Plastic Waste Material or Waste OilDocument5 pagesBiodiesel Using Plastic Waste Material or Waste OilLeo BoyNo ratings yet
- Pre Drive Authorization With Turbo On Demand (Air From Suspensor and Tank)Document6 pagesPre Drive Authorization With Turbo On Demand (Air From Suspensor and Tank)Leo BoyNo ratings yet
- NothingDocument58 pagesNothingLeo BoyNo ratings yet
- Design and Fabrication of Multipurpose Eco-Friendly Cleaning MachineDocument6 pagesDesign and Fabrication of Multipurpose Eco-Friendly Cleaning MachineLaxmi Gaari Abbai VijjuNo ratings yet
- Startup Success Stories: Al Habeeb M S S6 Mechanical Engineering: 12Document6 pagesStartup Success Stories: Al Habeeb M S S6 Mechanical Engineering: 12Leo BoyNo ratings yet
- Conferencepaper 2Document5 pagesConferencepaper 2Leo BoyNo ratings yet
- The Indian Startup EcosystemDocument13 pagesThe Indian Startup EcosystemLeo BoyNo ratings yet
- SKNSITS28Document5 pagesSKNSITS28Leo BoyNo ratings yet
- DME Unit 1 Notes - 2021 RevDocument28 pagesDME Unit 1 Notes - 2021 RevLeo BoyNo ratings yet
- SupermanDocument3 pagesSupermanGlen Michael F. WongNo ratings yet
- Etymology: StructureDocument2 pagesEtymology: StructureNaga VNo ratings yet
- Tarbucks: Starbucks Corporation Is An International Coffee and Coffeehouse Chain BasedDocument12 pagesTarbucks: Starbucks Corporation Is An International Coffee and Coffeehouse Chain BasedVenu GopalNo ratings yet
- KJ's Take Out MenuDocument1 pageKJ's Take Out MenuintegiegirlNo ratings yet
- Sip Annex 3 Gap Analysis Template EditedDocument5 pagesSip Annex 3 Gap Analysis Template EditedRiza GusteNo ratings yet
- Altivar 71 - ATV71H037M3Document13 pagesAltivar 71 - ATV71H037M3Mite TodorovNo ratings yet
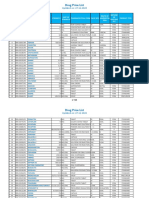
- PPR - LISTS - Registered Medicine Price List - 20221127 BahrainDocument318 pagesPPR - LISTS - Registered Medicine Price List - 20221127 BahrainvdvedNo ratings yet
- Time and Motion Study of OPDDocument15 pagesTime and Motion Study of OPDsaurabh100% (1)
- Viom Networks Becomes The First Indian Telecom Infrastructure Company To Receive ISO 14001 & OHSAS 18001 CertificationDocument2 pagesViom Networks Becomes The First Indian Telecom Infrastructure Company To Receive ISO 14001 & OHSAS 18001 CertificationViom NetworksNo ratings yet
- 1:21-cv-03674 Coomes, Williams, Slater & Tisbert vs. Centerra Group, LLCDocument16 pages1:21-cv-03674 Coomes, Williams, Slater & Tisbert vs. Centerra Group, LLCMichelle EdwardsNo ratings yet
- Chapter 18Document10 pagesChapter 18nehallakdawalaNo ratings yet
- Brachytherapy GYN Applicator CatalogDocument64 pagesBrachytherapy GYN Applicator CatalogJuan Lombardero100% (1)
- Practical 5.17 Protein MaterialsDocument2 pagesPractical 5.17 Protein MaterialsdeeyamullaNo ratings yet
- Fy em - 1 Question Bank 2023-24Document9 pagesFy em - 1 Question Bank 2023-24raju.sharmqNo ratings yet
- Exe Summ RajatCement Eng PDFDocument12 pagesExe Summ RajatCement Eng PDFflytorahulNo ratings yet
- Michigan Western District Stay On State Supreme Court Response On Whitmer Emergency Powers 061920Document7 pagesMichigan Western District Stay On State Supreme Court Response On Whitmer Emergency Powers 061920Beverly TranNo ratings yet
- ID 2019 CourseDescription MIKE21FlowModelFM HydrodynamicModellingUsingFlexibleMesh UKDocument2 pagesID 2019 CourseDescription MIKE21FlowModelFM HydrodynamicModellingUsingFlexibleMesh UKsaenuddinNo ratings yet
- Why encouraging entrepreneurship to boost economies is flawedDocument9 pagesWhy encouraging entrepreneurship to boost economies is flawedLaureanoNo ratings yet
- RMLNLU Moot Court Competition (Funding & Reimbursement) Policy, 2019.Document4 pagesRMLNLU Moot Court Competition (Funding & Reimbursement) Policy, 2019.Aakash ChauhanNo ratings yet
- Demand, Supply, and Market Equilibrium: Mcgraw-Hill/IrwinDocument34 pagesDemand, Supply, and Market Equilibrium: Mcgraw-Hill/IrwinLillian KobusingyeNo ratings yet
- Periodontal DiseaseDocument4 pagesPeriodontal Diseasemojako_badboysNo ratings yet
- Nigelaycardo 1Document8 pagesNigelaycardo 1ANGELICA AYCARDO FLORESNo ratings yet
- MONO POWER AMPLIFIER SERVICE MANUALDocument34 pagesMONO POWER AMPLIFIER SERVICE MANUALAlexey OnishenkoNo ratings yet
- WHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)Document3 pagesWHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)114912No ratings yet
- 2017 Aso Security TrainingDocument60 pages2017 Aso Security TrainingTanzila SiddiquiNo ratings yet