You might also like
- Physics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to DisplaysFrom EverandPhysics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to DisplaysNo ratings yet
- Nota de Aplicacion Integrado Electronico SMDocument2 pagesNota de Aplicacion Integrado Electronico SMMatias Resio CNo ratings yet
- 048 Venkatesh AUPEC01paperDocument5 pages048 Venkatesh AUPEC01paperDante FilhoNo ratings yet
- SBE Application-Note-64-3aug14Document8 pagesSBE Application-Note-64-3aug14Jaime ACNo ratings yet
- Ceramic Materials for Energy Applications IV: A Collection of Papers Presented at the 38th International Conference on Advanced Ceramics and Composites, January 27-31, 2014, Daytona Beach, FLFrom EverandCeramic Materials for Energy Applications IV: A Collection of Papers Presented at the 38th International Conference on Advanced Ceramics and Composites, January 27-31, 2014, Daytona Beach, FLHua-Tay LinNo ratings yet
- EuroCorr 2011 Paper No 1022 Harald OsvollDocument25 pagesEuroCorr 2011 Paper No 1022 Harald OsvollHedi Ben MohamedNo ratings yet
- A025 PaperDocument9 pagesA025 PaperkkkprotNo ratings yet
- BP10 (A4) PDFDocument4 pagesBP10 (A4) PDFRidaNo ratings yet
- EuroCorr 2011 Paper No 1022 Harald Osvoll PDFDocument25 pagesEuroCorr 2011 Paper No 1022 Harald Osvoll PDFMinh DoNo ratings yet
- Thermocouple Lab ReportDocument10 pagesThermocouple Lab Reportkhaito K5No ratings yet
- 1 s2.0 S1876610211005960 MainDocument8 pages1 s2.0 S1876610211005960 MainRenalyn TorioNo ratings yet
- 65 FAC-Calculation Model EngelsDocument10 pages65 FAC-Calculation Model EngelsAdriano Dorneles de OliveiraNo ratings yet
- Temperature Correction Factors - Power Grid IndiaDocument6 pagesTemperature Correction Factors - Power Grid IndiaAMIT BISWASNo ratings yet
- 2SC1213AKBDocument10 pages2SC1213AKBafdgtdsghfNo ratings yet
- Through Tubing Casing Break Detection An EM Thickness Tool ApplicationDocument14 pagesThrough Tubing Casing Break Detection An EM Thickness Tool ApplicationGiorgia Pasquetti MariathNo ratings yet
- Moisture Assessment For Power Transformers Using PDC and Drying Out Processes Evaluation1Document6 pagesMoisture Assessment For Power Transformers Using PDC and Drying Out Processes Evaluation115472No ratings yet
- EDC Manual PDFDocument83 pagesEDC Manual PDFMrinal MitraNo ratings yet
- Calibration of Water Flow Rate in An Ultrasonic Flow Meter Using The MAX35101Document10 pagesCalibration of Water Flow Rate in An Ultrasonic Flow Meter Using The MAX35101lailiNo ratings yet
- Caracterización y Prueba de Operación de Un Sensor de Temperatura RTD PT100Document11 pagesCaracterización y Prueba de Operación de Un Sensor de Temperatura RTD PT100Rodrigo VelásteguiNo ratings yet
- CAO LabDocument68 pagesCAO LabRahul GuptaNo ratings yet
- Technical Information For Carbon Monoxide SensorsDocument15 pagesTechnical Information For Carbon Monoxide Sensorssanchez_buenoNo ratings yet
- ResultsDocument35 pagesResultsTulasi RadhikaNo ratings yet
- Physics PracticalsDocument35 pagesPhysics Practicalssamira_666No ratings yet
- Water Coning in Horizontal WellDocument6 pagesWater Coning in Horizontal Wellalvaro_massimoNo ratings yet
- Jurnal 4Document16 pagesJurnal 4AnggiNo ratings yet
- Air Ion Counter PDFDocument4 pagesAir Ion Counter PDFRombang Rizky SihombingNo ratings yet
- B10021292S219Document4 pagesB10021292S219ayushpandey12344.apNo ratings yet
- CigreDocument11 pagesCigreAlfan Farizki HarahapNo ratings yet
- Dynamic Modeling of A Batch Bioreactor For Trans-Esterification of Waste Vegetable OilDocument40 pagesDynamic Modeling of A Batch Bioreactor For Trans-Esterification of Waste Vegetable Oilaremunabeel5895No ratings yet
- A 230ns Settling Time Type-I PLL With 0.96mW TDC Power and Simple T Calculation AlgorithmDocument4 pagesA 230ns Settling Time Type-I PLL With 0.96mW TDC Power and Simple T Calculation AlgorithmNguyen Van ToanNo ratings yet
- Evaluating A Measuring System: Leakage Radiation: Determining Best Measurement MethodDocument10 pagesEvaluating A Measuring System: Leakage Radiation: Determining Best Measurement MethodViolin SavcaNo ratings yet
- Impact of Pitot Tube Calibration On The UncertaintDocument11 pagesImpact of Pitot Tube Calibration On The UncertaintWilson SantosNo ratings yet
- 6 - 10 1021@je050020mDocument8 pages6 - 10 1021@je050020mMoltimer Folchart CrawNo ratings yet
- Datasheet Fotoacoplador EL817Document13 pagesDatasheet Fotoacoplador EL817Manoel Alves Feitosa FilhoNo ratings yet
- Snia020 TI Ultrasonic Sensing For Water Flow Meters and Heat MetersDocument14 pagesSnia020 TI Ultrasonic Sensing For Water Flow Meters and Heat MetersA N ArunkumarNo ratings yet
- Datasheet EE850Document4 pagesDatasheet EE850jeronimo davilaNo ratings yet
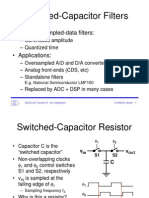
- Switched-Capacitor Filters: - "Analog" Sampled-Data FiltersDocument24 pagesSwitched-Capacitor Filters: - "Analog" Sampled-Data FiltersPushpendra DwivediNo ratings yet
- Analizadores de Carbon BlackDocument100 pagesAnalizadores de Carbon BlackMikael SalamancaNo ratings yet
- VADOSE/W TutorialDocument7 pagesVADOSE/W TutorialniltonNo ratings yet
- Research On Signal of Field Monitor of 7220A Localizer Beacon Subsystem of ILSDocument14 pagesResearch On Signal of Field Monitor of 7220A Localizer Beacon Subsystem of ILSĐào Nguyên TuếNo ratings yet
- Desing Review As The First Step of Transformer Life AssessmentDocument17 pagesDesing Review As The First Step of Transformer Life AssessmentAhmed HasanNo ratings yet
- Irg 4 PF 50 WDocument8 pagesIrg 4 PF 50 WQuickerManNo ratings yet
- Unit 6: Electronic Distance Measurement (EDM)Document29 pagesUnit 6: Electronic Distance Measurement (EDM)farie ahmadNo ratings yet
- Cooling Water Treatment Basic CalculationsDocument52 pagesCooling Water Treatment Basic CalculationsAngga Indriawan50% (2)
- T0220 PDFDocument35 pagesT0220 PDFChristian Andres PantojaNo ratings yet
- Linear Integrated Circuits (Lic'S) Laboratory Manual: Iii / Iv B.E (Ece), I - SemesterDocument52 pagesLinear Integrated Circuits (Lic'S) Laboratory Manual: Iii / Iv B.E (Ece), I - SemesterArun JyothiNo ratings yet
- 99041-Prediction of Scale and CO2 Corrosion in Oil Field SystemsDocument16 pages99041-Prediction of Scale and CO2 Corrosion in Oil Field SystemsdhireshmahajanNo ratings yet
- Caracterización y Prueba de Operación de Un Sensor de Temperatura RTD PT100Document11 pagesCaracterización y Prueba de Operación de Un Sensor de Temperatura RTD PT100UrielJuárezNo ratings yet
- 2N3903, 2N3904 General Purpose Transistors: NPN SiliconDocument8 pages2N3903, 2N3904 General Purpose Transistors: NPN SiliconOsamaNo ratings yet
- Digital Communications Practical File PDFDocument44 pagesDigital Communications Practical File PDFAshi Saxena100% (1)
- Gas and Electrolyte Diffusion PresentationDocument21 pagesGas and Electrolyte Diffusion PresentationszulkipeliNo ratings yet
- Model Based Optimization of Drilling Fluid Density and ViscosityDocument34 pagesModel Based Optimization of Drilling Fluid Density and ViscositySai KumarNo ratings yet
- AC LIghtning Impulse (OIP)Document5 pagesAC LIghtning Impulse (OIP)Aravind SampathNo ratings yet
- Vortex Shedding MetersDocument5 pagesVortex Shedding Metersitsurturn000No ratings yet
- Caracterización y Prueba de Operación de Un Sensor de Temperatura RTD PT100Document11 pagesCaracterización y Prueba de Operación de Un Sensor de Temperatura RTD PT100Eduardo OyarzunNo ratings yet
- On-Site Diagnosis of Transformers Case StudiesDocument15 pagesOn-Site Diagnosis of Transformers Case Studiestsogbadrakh ArvanNo ratings yet
- Notes On CTDO2 Data Acquisition and Processing UsiDocument11 pagesNotes On CTDO2 Data Acquisition and Processing UsiAbdul MuksithNo ratings yet
- Caracterización y Prueba de Operación de Un Sensor de Temperatura RTD PT100Document11 pagesCaracterización y Prueba de Operación de Un Sensor de Temperatura RTD PT100juan sebastianNo ratings yet
- d378 Aanderaa Oxygen Sensor 4330w 4330 4330f Low enDocument2 pagesd378 Aanderaa Oxygen Sensor 4330w 4330 4330f Low enDominique LefevreNo ratings yet
- Iso 5725 2 2019Document15 pagesIso 5725 2 2019Dominique LefevreNo ratings yet
- Murray 1968Document2 pagesMurray 1968Dominique LefevreNo ratings yet
- Knapp 1991Document8 pagesKnapp 1991Dominique LefevreNo ratings yet
- Danovaro 2018Document17 pagesDanovaro 2018Dominique LefevreNo ratings yet
- Standar Practice For Dealing With Outlying Observations PDFDocument20 pagesStandar Practice For Dealing With Outlying Observations PDFmerecis920No ratings yet
- Process Improvement Explained - What Is Lean Six SigmaDocument21 pagesProcess Improvement Explained - What Is Lean Six SigmaSunilNo ratings yet
- Problem SheetDocument3 pagesProblem SheetBabitha DhanaNo ratings yet
- Disclosure Timing Determinants of Quarterly Earning Release Dates - JappDocument26 pagesDisclosure Timing Determinants of Quarterly Earning Release Dates - Jappamanda_p_4No ratings yet
- Valuation and Risk ModelsDocument226 pagesValuation and Risk Models1690295017qq.comNo ratings yet
- 4 Statistics and Probability g11 Quarter 4 Module 4 Identifying The Appropriate Test Statistics Involving Population MeanDocument28 pages4 Statistics and Probability g11 Quarter 4 Module 4 Identifying The Appropriate Test Statistics Involving Population MeanISKA COMMISSIONNo ratings yet
- Normal DistributionDocument26 pagesNormal DistributionNicole Jane AntonioNo ratings yet
- MBA Salary Case StudyDocument18 pagesMBA Salary Case Studykashish khetrapalNo ratings yet
- Portfolio RiskDocument24 pagesPortfolio RiskABC DEFNo ratings yet
- Ex 8-1Document6 pagesEx 8-1Shweni Doobaree4No ratings yet
- Accuracy of Full-Arch Scans Using Intraoral ScannersDocument8 pagesAccuracy of Full-Arch Scans Using Intraoral Scannersaziz2007No ratings yet
- Impact of Artificial Intelligence On E MarketingDocument14 pagesImpact of Artificial Intelligence On E MarketingResearch ParkNo ratings yet
- Elementary StatisticsDocument22 pagesElementary StatisticsRipkah Vyanee100% (1)
- Quiz 2 Review Questions-1Document3 pagesQuiz 2 Review Questions-1Steven NguyenNo ratings yet
- Standard Practice For Applying Statistical Quality Assurance and Control Charting Techniques To Evaluate Analytical Measurement System PerformanceDocument35 pagesStandard Practice For Applying Statistical Quality Assurance and Control Charting Techniques To Evaluate Analytical Measurement System PerformanceLuisEduardoRomeroNo ratings yet
- Adult Attachment ScaleDocument10 pagesAdult Attachment ScaleAnca RaduNo ratings yet
- How and Why To Measure The Germination ProcessDocument11 pagesHow and Why To Measure The Germination Processsijan bistaNo ratings yet
- Bozarth PPT 051Document40 pagesBozarth PPT 051Tushar BallabhNo ratings yet
- Lesson 12 - Parameter and StatisticDocument16 pagesLesson 12 - Parameter and StatisticjenniferNo ratings yet
- Astm d4986 1998Document8 pagesAstm d4986 1998zeqs9No ratings yet
- Material Balance Calculations With Water Influx in The Presence of Uncertainty in PressuresDocument9 pagesMaterial Balance Calculations With Water Influx in The Presence of Uncertainty in PressuresBahman MatouriNo ratings yet
- Summary of The Integration of Total Quality Management (TQM) and Six-SigmaDocument7 pagesSummary of The Integration of Total Quality Management (TQM) and Six-SigmaAlbert ArominNo ratings yet
- Measures of Dispersion or Variability Range Variance Standard DeviationDocument12 pagesMeasures of Dispersion or Variability Range Variance Standard DeviationJamED ALRubioNo ratings yet
- Calculating Standard Error Bars For A GraphDocument6 pagesCalculating Standard Error Bars For A GraphKona MenyongaNo ratings yet
- Statistics Guide - Harvey MotulskyDocument148 pagesStatistics Guide - Harvey MotulskyRoberto NpgNo ratings yet
- Transit SNAP-9A Accident - Pu-238 DistributionDocument41 pagesTransit SNAP-9A Accident - Pu-238 DistributionDave MosherNo ratings yet
- U03a1 Analytics Internship Executive Summary 1 Group Hal HagoodDocument9 pagesU03a1 Analytics Internship Executive Summary 1 Group Hal HagoodHalHagoodNo ratings yet
- 13 NormalDocument10 pages13 NormalWong Yi KaiNo ratings yet
- Solution Manual For Managerial Economics Applications Strategies and Tactics 13th EditionDocument4 pagesSolution Manual For Managerial Economics Applications Strategies and Tactics 13th EditionMarjorie Gault100% (32)
- Working With Data in EviewsDocument24 pagesWorking With Data in EviewsDANHOUNDO RÉMINo ratings yet
- Bulk Material Handling: Practical Guidance for Mechanical EngineersFrom EverandBulk Material Handling: Practical Guidance for Mechanical EngineersRating: 5 out of 5 stars5/5 (1)
- Basic Digital Signal Processing: Butterworths Basic SeriesFrom EverandBasic Digital Signal Processing: Butterworths Basic SeriesRating: 5 out of 5 stars5/5 (1)
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsFrom EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongNo ratings yet
- The Galactic Federation: Discovering the Unknown Can Be Stranger Than FictionFrom EverandThe Galactic Federation: Discovering the Unknown Can Be Stranger Than FictionNo ratings yet
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AFrom EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ANo ratings yet
- Mechanical Vibrations and Condition MonitoringFrom EverandMechanical Vibrations and Condition MonitoringRating: 5 out of 5 stars5/5 (1)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CFrom EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNo ratings yet
- Airplane Flying Handbook: FAA-H-8083-3C (2024)From EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Rating: 4 out of 5 stars4/5 (12)
- Safety Theory and Control Technology of High-Speed Train OperationFrom EverandSafety Theory and Control Technology of High-Speed Train OperationRating: 5 out of 5 stars5/5 (2)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Machinery's Handbook Pocket Companion: Quick Access to Basic Data & More from the 31st EditionFrom EverandMachinery's Handbook Pocket Companion: Quick Access to Basic Data & More from the 31st EditionNo ratings yet
- Laminar Flow Forced Convection in Ducts: A Source Book for Compact Heat Exchanger Analytical DataFrom EverandLaminar Flow Forced Convection in Ducts: A Source Book for Compact Heat Exchanger Analytical DataNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Chasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItFrom EverandChasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItRating: 4 out of 5 stars4/5 (25)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideFrom Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideRating: 3.5 out of 5 stars3.5/5 (7)
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideFrom EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideRating: 4 out of 5 stars4/5 (8)
- Gas Turbines: A Handbook of Air, Land and Sea ApplicationsFrom EverandGas Turbines: A Handbook of Air, Land and Sea ApplicationsRating: 4 out of 5 stars4/5 (9)
- Electrical (Generator and Electrical Plant): Modern Power Station PracticeFrom EverandElectrical (Generator and Electrical Plant): Modern Power Station PracticeRating: 4 out of 5 stars4/5 (9)