You might also like
- Are We Done With Ray TracingDocument91 pagesAre We Done With Ray TracingvmaximusNo ratings yet
- Transform Your Smartphone Into A DSLR Camera: Learning The ISP in The WildDocument38 pagesTransform Your Smartphone Into A DSLR Camera: Learning The ISP in The Wildyaliten518No ratings yet
- 9 - SensorModelsAndMappingDocument117 pages9 - SensorModelsAndMappingshitalchiddarwarNo ratings yet
- Real-Time Seamless Single Shot 6D Object Pose PredictionDocument16 pagesReal-Time Seamless Single Shot 6D Object Pose Prediction1903237473No ratings yet
- Automatic Robot Hand-Eye Calibration Enabled by Learning-Based 3D VisionDocument24 pagesAutomatic Robot Hand-Eye Calibration Enabled by Learning-Based 3D VisionAFTABNo ratings yet
- Real Time Pose EstimationDocument9 pagesReal Time Pose EstimationSaran KhaliqNo ratings yet
- Generating Synthetic Imagery For TRN Using PANGU and Unreal EngineDocument1 pageGenerating Synthetic Imagery For TRN Using PANGU and Unreal EngineShen GeNo ratings yet
- DSP-SLAM: Object Oriented SLAM With Deep Shape PriorsDocument16 pagesDSP-SLAM: Object Oriented SLAM With Deep Shape PriorsmateNo ratings yet
- Li Supervised Fitting of Geometric Primitives To 3D Point CloudsDocument9 pagesLi Supervised Fitting of Geometric Primitives To 3D Point CloudsYawkal AddisNo ratings yet
- Tracking of Industrial Objects by Using CAD Models: October 2007Document10 pagesTracking of Industrial Objects by Using CAD Models: October 2007thanhit08No ratings yet
- RANSAC Vs ICP PDFDocument15 pagesRANSAC Vs ICP PDFSaransh Vora100% (1)
- 2019 IVS Radarslam TuprintsDocument7 pages2019 IVS Radarslam TuprintsAsmaa HassanNo ratings yet
- Real-Time Loop Closure in 2D LIDAR SLAM: Wolfgang Hess, Damon Kohler, Holger Rapp, Daniel AndorDocument8 pagesReal-Time Loop Closure in 2D LIDAR SLAM: Wolfgang Hess, Damon Kohler, Holger Rapp, Daniel AndorMayuresh SarodeNo ratings yet
- Stereo R-CNN 3D Object DetectionDocument9 pagesStereo R-CNN 3D Object DetectionXiaotian LiuNo ratings yet
- 三维重建文档教程Document19 pages三维重建文档教程guan yunxiaoNo ratings yet
- RGB-D Mapping Uses Depth Cameras for Dense 3D Indoor Environment ModelingDocument15 pagesRGB-D Mapping Uses Depth Cameras for Dense 3D Indoor Environment ModelingHieu TranNo ratings yet
- 3 Fundamentals For Computer Vision & Deep LearningDocument56 pages3 Fundamentals For Computer Vision & Deep LearningmadhuNo ratings yet
- Raster Scan and Random Scan PDFDocument10 pagesRaster Scan and Random Scan PDFMusic DiaryNo ratings yet
- Raster Scan and Random Scan PDFDocument10 pagesRaster Scan and Random Scan PDFmidhunNo ratings yet
- Vision Transformers For Dense Prediction Tasks: Junyong Lee Computer Graphics LabDocument22 pagesVision Transformers For Dense Prediction Tasks: Junyong Lee Computer Graphics LabJunyong LeeNo ratings yet
- Object Detection and Pose Estimation Pipelines ComparisonDocument7 pagesObject Detection and Pose Estimation Pipelines ComparisonDyuman AdityaNo ratings yet
- Pix2Pose: Pixel-Wise Coordinate Regression of Objects For 6D Pose EstimationDocument17 pagesPix2Pose: Pixel-Wise Coordinate Regression of Objects For 6D Pose Estimation1903237473No ratings yet
- Yang SANet Scene Agnostic Network For Camera Localization ICCV 2019 PaperDocument10 pagesYang SANet Scene Agnostic Network For Camera Localization ICCV 2019 Papervishalk172No ratings yet
- Pang 2019Document6 pagesPang 2019RAGHU PILLINo ratings yet
- Paper 3Document6 pagesPaper 3Nishanthan KNo ratings yet
- Pose Estimation of Large Scale Objects With 3DDocument20 pagesPose Estimation of Large Scale Objects With 3DAljosa OsepNo ratings yet
- 3 Fundamentals For Computer Vision & Deep LearningDocument56 pages3 Fundamentals For Computer Vision & Deep LearningRajachandra VoodigaNo ratings yet
- youyang-et-al-2019-robust-improvement-solution-to-perspective-n-point-problemDocument15 pagesyouyang-et-al-2019-robust-improvement-solution-to-perspective-n-point-problemhebaya2101No ratings yet
- Radargrammetry and Sar InterferommetryDocument6 pagesRadargrammetry and Sar InterferommetryvrixscribdNo ratings yet
- SplaTAMDocument11 pagesSplaTAMVan HuiNo ratings yet
- Temporally Reliable Motion Vectors For Real-Time Ray TracingDocument12 pagesTemporally Reliable Motion Vectors For Real-Time Ray TracingIris ValdiviesoNo ratings yet
- Survey MethodsDocument5 pagesSurvey MethodsBảo Nguyễn Hoàng DuyNo ratings yet
- Image Projection Onto Flat LiDAR Point Cloud Surfaces To Create Dense and Smooth 3D Color MapsDocument5 pagesImage Projection Onto Flat LiDAR Point Cloud Surfaces To Create Dense and Smooth 3D Color Mapsvishwas sNo ratings yet
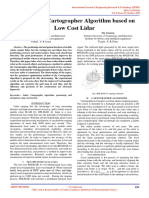
- Research On Cartographer Algorithm Based On Low CoDocument4 pagesResearch On Cartographer Algorithm Based On Low Codelaware4parkerNo ratings yet
- Feature Matching & RANSACDocument33 pagesFeature Matching & RANSACbattal2023513No ratings yet
- 2020 CVPR EpipolarTransformerDocument10 pages2020 CVPR EpipolarTransformerChengzeng FengNo ratings yet
- Joint Detection and TrackingDocument7 pagesJoint Detection and TrackingEngr EbiNo ratings yet
- 3D Laser Scanner: Prince Khatarkar, Rahul Gupta and Ayush ShakyaDocument4 pages3D Laser Scanner: Prince Khatarkar, Rahul Gupta and Ayush ShakyaHilman HazmiNo ratings yet
- 3D Laser Scanner Point Cloud CreationDocument4 pages3D Laser Scanner Point Cloud CreationAkshay RSNo ratings yet
- Symmetry-Corrected RMSD Calculations in PythonDocument7 pagesSymmetry-Corrected RMSD Calculations in PythonmayaazwirNo ratings yet
- TD-LTE Load Analysis VS SINR QualityDocument12 pagesTD-LTE Load Analysis VS SINR QualitySarsij MishraNo ratings yet
- TD-LTE Load Analysis VS SINR QualityDocument12 pagesTD-LTE Load Analysis VS SINR QualitySarsij MishraNo ratings yet
- TD-LTE Load Analysis VS SINR: How Increased Load Impacts Signal QualityDocument12 pagesTD-LTE Load Analysis VS SINR: How Increased Load Impacts Signal QualityengrSadiqueNo ratings yet
- Image and Video Super-ResolutionDocument62 pagesImage and Video Super-ResolutionjebemnatoNo ratings yet
- Monorun: Monocular 3D Object Detection by Reconstruction and Uncertainty PropagationDocument13 pagesMonorun: Monocular 3D Object Detection by Reconstruction and Uncertainty Propagationcheng pengNo ratings yet
- 5G NR Beamforming Beam Count: Andrew KolomatskiDocument6 pages5G NR Beamforming Beam Count: Andrew KolomatskiAndrew KolomatskiNo ratings yet
- Zeng 2014 IOP Conf. Ser. Earth Environ. Sci. 17 012160Document8 pagesZeng 2014 IOP Conf. Ser. Earth Environ. Sci. 17 012160vishwas sNo ratings yet
- Automated 3D Scenes Reconstruction For Mobile Robots Using Laser ScanningDocument6 pagesAutomated 3D Scenes Reconstruction For Mobile Robots Using Laser ScanningIan MedeirosNo ratings yet
- Fast and Robust Pose Estimation Algorithm For Bin Picking Using Point Pair FeatureDocument6 pagesFast and Robust Pose Estimation Algorithm For Bin Picking Using Point Pair FeatureBích Lâm NgọcNo ratings yet
- Design ThinkingDocument11 pagesDesign Thinkingtradersindian4No ratings yet
- Exploring Spiking Neural Networks For Agent Modelling: Internship ReviewDocument24 pagesExploring Spiking Neural Networks For Agent Modelling: Internship ReviewAdheshNo ratings yet
- Resolution Adjustable 3D Scanner Based On Using Stereo CamerasDocument5 pagesResolution Adjustable 3D Scanner Based On Using Stereo Camerasverze1No ratings yet
- 19926-Article Text-23939-1-2-20220628Document9 pages19926-Article Text-23939-1-2-20220628陈述涵No ratings yet
- Real-Time 6D Object Pose Estimation On CPU: Yoshinori Konishi, Kosuke Hattori and Manabu HashimotoDocument8 pagesReal-Time 6D Object Pose Estimation On CPU: Yoshinori Konishi, Kosuke Hattori and Manabu HashimotoNicolas ProuteauNo ratings yet
- Estimated Price List For Implementation in MATLAB: Slno ModulesDocument1 pageEstimated Price List For Implementation in MATLAB: Slno Modulesநான் மகான் அல்லNo ratings yet
- Project OutlineDocument1 pageProject OutlineNoopur SinghNo ratings yet
- 2019 vio应用AR综述Document25 pages2019 vio应用AR综述Zhou JakeNo ratings yet
- Edge-Aware Image Processing Techniques for Detail ManipulationDocument56 pagesEdge-Aware Image Processing Techniques for Detail ManipulationkirankumarperamNo ratings yet
- IEEE Drone para Vuelo AutonomoDocument4 pagesIEEE Drone para Vuelo Autonomosault07No ratings yet
- Swin TransformersDocument2 pagesSwin TransformersWhatSoAverNo ratings yet
- Open CVIntroDocument13 pagesOpen CVIntroWhatSoAverNo ratings yet
- 3D Kinematic Scheme With 3DExperienceDocument21 pages3D Kinematic Scheme With 3DExperienceWhatSoAverNo ratings yet
- A Smart Stretcher and Integrated Medical IntelligeDocument6 pagesA Smart Stretcher and Integrated Medical IntelligeWhatSoAverNo ratings yet
- LénL,\x.rlLL r^n-T \p f\,u q-L SCt'"-cx-6da Q'',*{"'t-*"^"\ "-\î'''^ .tDocument9 pagesLénL,\x.rlLL r^n-T \p f\,u q-L SCt'"-cx-6da Q'',*{"'t-*"^"\ "-\î'''^ .tWhatSoAver0% (1)
- New Microsoft Word DocumexcvbnntDocument13 pagesNew Microsoft Word Documexcvbnntasdfg7140No ratings yet
- Caves Caves and information overload challengesDocument2 pagesCaves Caves and information overload challengesalfonso rico fuentesNo ratings yet
- PEGA Course ContentDocument8 pagesPEGA Course ContentFree LancerNo ratings yet
- PeopleSoft FSCM 92 Release Notes Through Update Image7Document184 pagesPeopleSoft FSCM 92 Release Notes Through Update Image7ram4friendsNo ratings yet
- FF Robot OutlineDocument14 pagesFF Robot OutlineSHARATH.R.SHETTIGARNo ratings yet
- Unifier SecurityDocument10 pagesUnifier SecuritybaabdullahNo ratings yet
- Dr. Ambedkar FoundationDocument1 pageDr. Ambedkar Foundationteja tejaNo ratings yet
- PLC ProjectsDocument12 pagesPLC Projectssheraaz87No ratings yet
- EC 160elevator Intelligent Integrated Machine - V1.2Document227 pagesEC 160elevator Intelligent Integrated Machine - V1.2BùiNghĩaNo ratings yet
- Lecture Notes: ON Advance Manufacturing &Cad/CamDocument23 pagesLecture Notes: ON Advance Manufacturing &Cad/CamDr.R.Pugazhenthi Associate Prof.No ratings yet
- Mobile ComputingDocument5 pagesMobile ComputingAjay Dubey0% (1)
- Haulage Calculation - Minesight HaulageDocument12 pagesHaulage Calculation - Minesight HaulageNurlanOruzievNo ratings yet
- Understanding Sarbanes OxleyDocument11 pagesUnderstanding Sarbanes OxleyrangoonroudyNo ratings yet
- Quality Control Circle (QCC) Story 7 StepsDocument2 pagesQuality Control Circle (QCC) Story 7 StepspsureshpNo ratings yet
- Fluent12 Lecture11 PostDocument49 pagesFluent12 Lecture11 PostAlex__182No ratings yet
- AaaDocument51 pagesAaaEduin MerinhoNo ratings yet
- Mastercam2024 pb4 Resolved IssuesDocument22 pagesMastercam2024 pb4 Resolved Issuessanath deltronNo ratings yet
- Build Your Own Reamp Box - Recording MagazineDocument2 pagesBuild Your Own Reamp Box - Recording MagazineArnab BhattacharyaNo ratings yet
- Clmd4a Ictg6Document25 pagesClmd4a Ictg6Rose RamosNo ratings yet
- CP Algorithms Com Algebra Binary Exp HTMLDocument5 pagesCP Algorithms Com Algebra Binary Exp HTMLArnab SenNo ratings yet
- Direct Marketing: RFM AnalysisDocument32 pagesDirect Marketing: RFM AnalysisNeha MishraNo ratings yet
- Benfenske: 6 Basics of Landscape PaintingDocument7 pagesBenfenske: 6 Basics of Landscape PaintingBruno SanromanNo ratings yet
- Sabai Firmware UpgradeDocument2 pagesSabai Firmware Upgrade00001010No ratings yet
- SOC-100 Social Media and Socialization Survey and AnalysisDocument4 pagesSOC-100 Social Media and Socialization Survey and Analysisbonnie reeseNo ratings yet
- Practice Module 2 Introduction To Programming: NIM/Name: 4312111010/abdan Fauzan NurtsaniDocument6 pagesPractice Module 2 Introduction To Programming: NIM/Name: 4312111010/abdan Fauzan NurtsaniAbdanFznNo ratings yet
- NSA Mind Control and PsyopsDocument3 pagesNSA Mind Control and PsyopsShahid KhanNo ratings yet
- DS PPT Unit - 2Document119 pagesDS PPT Unit - 2ravikumar03508No ratings yet
- Electronic Remote Control: Operation ManualDocument30 pagesElectronic Remote Control: Operation ManualSurendran PattineyapanNo ratings yet
- EmbeddedDocument219 pagesEmbeddedkoceko100% (2)
- Sepam Series 20 and Its Optional ModulesDocument2 pagesSepam Series 20 and Its Optional ModulesEphraem KalisNo ratings yet