You might also like
- A Survey of Novel Airborne SAR Signal Processing Techniques and Applications For DLR's F-SAR SensorDocument6 pagesA Survey of Novel Airborne SAR Signal Processing Techniques and Applications For DLR's F-SAR SensorRupesh KumarNo ratings yet
- Measurement While Drilling: Signal Analysis, Optimization and DesignFrom EverandMeasurement While Drilling: Signal Analysis, Optimization and DesignNo ratings yet
- 1 RNRPUA - Module 1Document69 pages1 RNRPUA - Module 1Shiena Caminero100% (2)
- The Fast Track to Your Extra Class Ham Radio License: Covers All FCC Amateur Extra Class Exam Questions July 1, 2020 Through June 30, 2024From EverandThe Fast Track to Your Extra Class Ham Radio License: Covers All FCC Amateur Extra Class Exam Questions July 1, 2020 Through June 30, 2024No ratings yet
- Nav6online 150116191408 Conversion Gate02Document172 pagesNav6online 150116191408 Conversion Gate02Arman Pineda100% (3)
- Radar and ARPA Manual: Radar, AIS and Target Tracking for Marine Radar UsersFrom EverandRadar and ARPA Manual: Radar, AIS and Target Tracking for Marine Radar UsersRating: 4.5 out of 5 stars4.5/5 (6)
- Antenna Pattern Measurement Guide 2020Document46 pagesAntenna Pattern Measurement Guide 2020Ryan KeyNo ratings yet
- Radar N Arpa (Subra)Document187 pagesRadar N Arpa (Subra)ram091988100% (3)
- Radar Course NotesDocument88 pagesRadar Course NotesRoken ZgoulNo ratings yet
- Radar 1Document57 pagesRadar 1Tiya JainNo ratings yet
- Course: MTEC 102 Period: Semi Final Week: 1 Session: 1 Topic: Manual Radar PlottingDocument48 pagesCourse: MTEC 102 Period: Semi Final Week: 1 Session: 1 Topic: Manual Radar PlottingJan Emanuelle CabilaoNo ratings yet
- Good 5989-7575en - Radar MeasurementsDocument88 pagesGood 5989-7575en - Radar MeasurementspablocotanNo ratings yet
- Radar Tech Training IOM-88 Module-CDocument55 pagesRadar Tech Training IOM-88 Module-CDedi KusnadiNo ratings yet
- Navigatie - RADAR - ARPADocument172 pagesNavigatie - RADAR - ARPACatalin Apetre91% (11)
- LecturesDocument8 pagesLecturesSeetharamKashyapNo ratings yet
- Signal Processing Algorithms for MIMO RadarDocument155 pagesSignal Processing Algorithms for MIMO RadarsmbokhariNo ratings yet
- IOM 88 Module BDocument65 pagesIOM 88 Module BandiNo ratings yet
- Lec 15 Midterm RADAR in Marine NavigationDocument47 pagesLec 15 Midterm RADAR in Marine NavigationroselleNo ratings yet
- Performance of Low-Rise SMRF Structures On High Seismic Areas in The PhilippinesDocument22 pagesPerformance of Low-Rise SMRF Structures On High Seismic Areas in The PhilippinesFritze Hansteen OngNo ratings yet
- PrincipleRS LEE 202206Document20 pagesPrincipleRS LEE 202206Dhimaz BhaskaraNo ratings yet
- Scanter 4000/4100: A Multi Purpose Surveillance RadarDocument4 pagesScanter 4000/4100: A Multi Purpose Surveillance Radargrindormh53100% (1)
- Introduction to Radar Engineering FundamentalsDocument146 pagesIntroduction to Radar Engineering FundamentalsRam KalvaNo ratings yet
- DOC-E1404 Radar Sensing Ted Version 2Document11 pagesDOC-E1404 Radar Sensing Ted Version 2MirceaNo ratings yet
- Gapoy, Frednixen B Learning - Module - NAV - 5 - Operational - Use - of - RADAR - ARPA - LO - No. - 1.2Document15 pagesGapoy, Frednixen B Learning - Module - NAV - 5 - Operational - Use - of - RADAR - ARPA - LO - No. - 1.2Frednixen Bustamante GapoyNo ratings yet
- RADARDocument47 pagesRADARGan See John PhilipNo ratings yet
- Wavelet PresentationDocument22 pagesWavelet Presentationwho3No ratings yet
- EEE381B Aerospace Systems & Avionics: RadarDocument26 pagesEEE381B Aerospace Systems & Avionics: RadarMohammad AhmedNo ratings yet
- Thesis PPRabe FINALDocument110 pagesThesis PPRabe FINALMuhammad Rafiq RavinNo ratings yet
- RESULTADOS DE PRUEBAS OBTENIDOS CON LH SYSTEMS ADS40 AIRBORNE DIGITAL... Anko BÖRNER, Werner KIRCHHOFERDocument6 pagesRESULTADOS DE PRUEBAS OBTENIDOS CON LH SYSTEMS ADS40 AIRBORNE DIGITAL... Anko BÖRNER, Werner KIRCHHOFERCristian MoralesNo ratings yet
- Sea Clutter & Surface ClutterDocument22 pagesSea Clutter & Surface ClutterSaraswathi Asirvatham100% (1)
- Radar N Plan ConductDocument7 pagesRadar N Plan ConductYAD YANKEENo ratings yet
- Progress in Electromagnetics Research, PIER 49, 203-218, 2004Document16 pagesProgress in Electromagnetics Research, PIER 49, 203-218, 2004sitaram_1No ratings yet
- IFC - Acquisition RadarsDocument31 pagesIFC - Acquisition RadarsAndré100% (1)
- Sar GmtiDocument6 pagesSar Gmtibring it onNo ratings yet
- D5 L1-2 Letraon Lecture1 2Document85 pagesD5 L1-2 Letraon Lecture1 2N'rique SilvaNo ratings yet
- Radar Systems: Lecture NotesDocument111 pagesRadar Systems: Lecture Notesnnidhu890No ratings yet
- Principles of Synthetic Aperture Radar: Surveys in Geophysics January 2000Document13 pagesPrinciples of Synthetic Aperture Radar: Surveys in Geophysics January 2000naveen narula100% (1)
- G. Richard Curry - Radar Essentials - 2012Document144 pagesG. Richard Curry - Radar Essentials - 2012anteys100% (4)
- Kesimpulan dari tutorial radar dasarDocument7 pagesKesimpulan dari tutorial radar dasarnorma100% (2)
- Jawaharlal Nehru Technological University Radar Systems CourseDocument201 pagesJawaharlal Nehru Technological University Radar Systems CourseMandala pavan KalyanNo ratings yet
- Introduction To Radar: PresentationDocument56 pagesIntroduction To Radar: PresentationKenboni DuferaNo ratings yet
- Module2 Radar FundamentalsDocument44 pagesModule2 Radar FundamentalsEridaniNo ratings yet
- Part I-Radar: Continuous Wave RadarsDocument25 pagesPart I-Radar: Continuous Wave RadarsdangkitaNo ratings yet
- FM Radar - 2014Document36 pagesFM Radar - 2014Guang ChenNo ratings yet
- 12 Nav VDocument200 pages12 Nav VKaren DavilaNo ratings yet
- 8 - Radar 2Document88 pages8 - Radar 2Ali NasiriNo ratings yet
- Capt. Sharda Q & ADocument40 pagesCapt. Sharda Q & AAbu Syeed Md. Aurangzeb Al Masum100% (1)
- Risat-1: It Can Spy and Do A Hundred Humdrum ThingsDocument29 pagesRisat-1: It Can Spy and Do A Hundred Humdrum ThingsMukesh PandeyNo ratings yet
- Radar & Navigation QuestionsDocument2 pagesRadar & Navigation QuestionsFaizan KaziNo ratings yet
- Mci 95200-955000 Uhf DTV AntennaDocument2 pagesMci 95200-955000 Uhf DTV AntennayusufasariNo ratings yet
- Hull Resistance Lab - Application in Fine /marine: NOA ProgramDocument22 pagesHull Resistance Lab - Application in Fine /marine: NOA ProgramSimon LecuyerNo ratings yet
- 498 Design Report 11-24-2020Document33 pages498 Design Report 11-24-2020Conor WillsieNo ratings yet
- EE602 Radar Notes-1Document41 pagesEE602 Radar Notes-1Yash Nimje100% (1)
- Ship detection using morphological component analysis of radar imagesDocument9 pagesShip detection using morphological component analysis of radar imagesRaghul RamasamyNo ratings yet
- Bridge Equipment: Capt. S. Swaroop Nautical Faculty B. SC Nautical Science Semester - VDocument48 pagesBridge Equipment: Capt. S. Swaroop Nautical Faculty B. SC Nautical Science Semester - VMayankNo ratings yet
- SeaDarQ Brochure WebDocument4 pagesSeaDarQ Brochure WebWesley JangNo ratings yet
- Work Boats Waflaf 665 - 1963 PDFDocument8 pagesWork Boats Waflaf 665 - 1963 PDFJUAN GONZALEZ NUNEZ100% (1)
- Hydrocyclones For Classification in Mineral Processing-DataDocument7 pagesHydrocyclones For Classification in Mineral Processing-Datapanoram bou20No ratings yet
- Wilson Tool - Press Brake Specials - Scule Speciale Pentru Abkant - SM TECH SRLDocument25 pagesWilson Tool - Press Brake Specials - Scule Speciale Pentru Abkant - SM TECH SRLSM TECH SRLNo ratings yet
- Acoplamentos de Lamela de Aço ROBA-DSDocument72 pagesAcoplamentos de Lamela de Aço ROBA-DSFernando KonitzNo ratings yet
- E-Link 1000EXR Datasheet v16 PDFDocument2 pagesE-Link 1000EXR Datasheet v16 PDFjorlugonNo ratings yet
- A Practical Guide To Healthcare DataDocument20 pagesA Practical Guide To Healthcare DataGeorge Tanaruno100% (1)
- S&S Previous Question PapersDocument75 pagesS&S Previous Question PapersAllanki Sanyasi RaoNo ratings yet
- Introduction to PLCs in 40 CharactersDocument27 pagesIntroduction to PLCs in 40 CharactersGeraldoadriNo ratings yet
- lm2841 Transistor RegulatorDocument27 pageslm2841 Transistor RegulatorAbbas MaghazehiNo ratings yet
- Fluke 27 II and 28 II:: Rugged IP 67 Industrial MultimetersDocument2 pagesFluke 27 II and 28 II:: Rugged IP 67 Industrial MultimetersSuleyman KapucuNo ratings yet
- Streamlined Beauty - A History of Automotive DesignDocument9 pagesStreamlined Beauty - A History of Automotive DesignRajanikantJadhav100% (2)
- Cron Format PDFDocument3 pagesCron Format PDFDataStage4YouNo ratings yet
- The Inside Angle On Valve Seats What You Need To Know To Go With The FlowDocument7 pagesThe Inside Angle On Valve Seats What You Need To Know To Go With The Flowstefan.vince536No ratings yet
- Offshore Wind Park Connection To An HVDC Platform, Without Using An AC Collector PlatformDocument120 pagesOffshore Wind Park Connection To An HVDC Platform, Without Using An AC Collector PlatformHaseeb Ahmad100% (1)
- Quarter Car Analysis PDFDocument10 pagesQuarter Car Analysis PDFHerman AhmadNo ratings yet
- Marketing Management: Marketing Audit Report: Sony CorporationDocument24 pagesMarketing Management: Marketing Audit Report: Sony CorporationJahanzaib ShahzadNo ratings yet
- Thinner For Acrylic DvaDocument1 pageThinner For Acrylic DvangnfgnNo ratings yet
- Sem VII REVDocument32 pagesSem VII REVSuraj PachakarNo ratings yet
- DocumentoDocument7 pagesDocumentoIago Benvindo82% (11)
- Stair Structure DetailDocument2 pagesStair Structure Detailisan.structural TjsvgalavanNo ratings yet
- E Z MRPManual PDFDocument183 pagesE Z MRPManual PDFdavy_7569No ratings yet
- Project Management: Peeyush Pandey Assistant Professor IIM RohtakDocument27 pagesProject Management: Peeyush Pandey Assistant Professor IIM RohtakSanyam JainNo ratings yet
- Specification sheet for 122x32 STN LCD moduleDocument21 pagesSpecification sheet for 122x32 STN LCD moduleИгорь НесвитNo ratings yet
- Low Pressure Switch Technical SpecsDocument10 pagesLow Pressure Switch Technical Specsdcf67myNo ratings yet
- Evaluating A Novel Gasoline Surrogate Containing Isopentane Using A Rapid Compression Machine and An EngineDocument11 pagesEvaluating A Novel Gasoline Surrogate Containing Isopentane Using A Rapid Compression Machine and An EngineFabNo ratings yet
- PLC-2700 Series Instruction ManualDocument46 pagesPLC-2700 Series Instruction ManualNathan Peroni AlvesNo ratings yet
- Quectel M10 AT Commands Manual V4.0 PDFDocument248 pagesQuectel M10 AT Commands Manual V4.0 PDFNarendra NarenNo ratings yet
- Lift Control System OverviewDocument2 pagesLift Control System OverviewleekeanyewNo ratings yet
- Approved Drawing of Boundary WallDocument1 pageApproved Drawing of Boundary WallAnup Singh RajputNo ratings yet
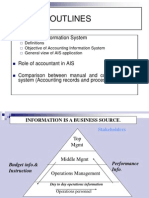
- Chapter 1: Introduction To AISDocument29 pagesChapter 1: Introduction To AISFatiha YusofNo ratings yet