You might also like
- Monocular Vision For Mobile Robot Localization and Autonomous NavigationDocument24 pagesMonocular Vision For Mobile Robot Localization and Autonomous NavigationJeanchristophe1996No ratings yet
- Jose Luis Guzman, and Roland Siegwart : Ramon Gonzalez, Francisco Rodriguez Cedric PradalierDocument14 pagesJose Luis Guzman, and Roland Siegwart : Ramon Gonzalez, Francisco Rodriguez Cedric PradalierSaimoon QuaziNo ratings yet
- Evaluation of A Factorized ICP Based Method For 3D Mapping and LocalizationDocument9 pagesEvaluation of A Factorized ICP Based Method For 3D Mapping and LocalizationIan MedeirosNo ratings yet
- Vision-Based Mobile Robot Localization and Mapping Using Scale-Invariant FeaturesDocument8 pagesVision-Based Mobile Robot Localization and Mapping Using Scale-Invariant FeaturesJeanchristophe1996No ratings yet
- Virtual-To-Real Deep Reinforcement Learning - Continuous Control of Mobile Robots For Mapless NavigationDocument6 pagesVirtual-To-Real Deep Reinforcement Learning - Continuous Control of Mobile Robots For Mapless Navigationbuihuyanh2018No ratings yet
- 06 Avr PDFDocument6 pages06 Avr PDFrf_munguiaNo ratings yet
- Results in Physics: SciencedirectDocument9 pagesResults in Physics: SciencedirectVishal PatilNo ratings yet
- Sensors: Seamless Positioning and Navigation by Using Geo-Referenced Images and Multi-Sensor DataDocument23 pagesSensors: Seamless Positioning and Navigation by Using Geo-Referenced Images and Multi-Sensor DataSC Priyadarshani de SilvaNo ratings yet
- Intelligent Mobility: Autonomous Outdoor Robotics at The DFKIDocument7 pagesIntelligent Mobility: Autonomous Outdoor Robotics at The DFKIFernando MartinezNo ratings yet
- Distributed Range-Based Relative Localization of Robot SwarmsDocument17 pagesDistributed Range-Based Relative Localization of Robot Swarmshbhbhb hbhbhbNo ratings yet
- Robot Motion Planning For Map Building: Benjam In Tovar, Rafael Murrieta-Cid and Claudia EstevesDocument8 pagesRobot Motion Planning For Map Building: Benjam In Tovar, Rafael Murrieta-Cid and Claudia EstevesIulian AlexNo ratings yet
- Verma 2016Document4 pagesVerma 2016cexopib409No ratings yet
- Paper 3-Experimental Validation For CRFNFP AlgorithmDocument7 pagesPaper 3-Experimental Validation For CRFNFP AlgorithmIjarai ManagingEditorNo ratings yet
- Mobile Robot Navigation in A Corridor Using Visual OdometryDocument6 pagesMobile Robot Navigation in A Corridor Using Visual OdometryEbit Nur AlfianNo ratings yet
- Literature SurveyDocument6 pagesLiterature SurveySanthosh Kumar NeelamNo ratings yet
- Optimal Path Planning of Mobile Robots: A ReviewDocument7 pagesOptimal Path Planning of Mobile Robots: A ReviewIng. Omar SerranoNo ratings yet
- View-Based Approach To Robot Navigation: Yoshio MatsumotoDocument7 pagesView-Based Approach To Robot Navigation: Yoshio MatsumotoUmer Farooq ShahNo ratings yet
- Enabling Robust Visual Navigation: PHD Research ProposalDocument14 pagesEnabling Robust Visual Navigation: PHD Research ProposalshaheerdurraniNo ratings yet
- Castle Etal Ivc2010Document11 pagesCastle Etal Ivc2010Zsofia PopNo ratings yet
- 993 Learning Active Camera For MulDocument13 pages993 Learning Active Camera For Mulzeeeshan khanNo ratings yet
- Sensors 18 02476Document27 pagesSensors 18 02476busuulwaerickNo ratings yet
- A Self-Organizing Method For Robot Navigation Based On Learned Place and Head-Direction CellsDocument8 pagesA Self-Organizing Method For Robot Navigation Based On Learned Place and Head-Direction CellsMeryem HNo ratings yet
- Neurocomputing: Fei Yan, Jiawei Wang, Guojian He, Huan Chang, Yan ZhuangDocument10 pagesNeurocomputing: Fei Yan, Jiawei Wang, Guojian He, Huan Chang, Yan Zhuangpoornima24No ratings yet
- Location Based Thul006Document6 pagesLocation Based Thul00618IT029 HARISH SNo ratings yet
- A Universal Vision-Based Navigation System For Autonomous Indoor RobotsDocument14 pagesA Universal Vision-Based Navigation System For Autonomous Indoor RobotsNono NonoNo ratings yet
- Cs7630 - Autonomous Robotics Final Project Report: Georgia Institute of Technology Spring 2008Document24 pagesCs7630 - Autonomous Robotics Final Project Report: Georgia Institute of Technology Spring 2008Intel KarthikNo ratings yet
- Objects Detection and Extraction in Video Sequences Captured by A Mobile CameraDocument7 pagesObjects Detection and Extraction in Video Sequences Captured by A Mobile Cameraanil kasotNo ratings yet
- Indoor Navigation With A Swarm of Flying RobotsDocument7 pagesIndoor Navigation With A Swarm of Flying RobotsAnonymous ITnkbIEFNo ratings yet
- Hybrid Motion Model For Multiple Object Tracking in Mobile DevicesDocument14 pagesHybrid Motion Model For Multiple Object Tracking in Mobile Devicessha istaNo ratings yet
- Object Handling in Cluttered Indoor Environment With A Mobile ManipulatorDocument6 pagesObject Handling in Cluttered Indoor Environment With A Mobile ManipulatorSomeone LolNo ratings yet
- Imtc RobotNavigation 7594Document5 pagesImtc RobotNavigation 7594flv_91No ratings yet
- Handling Uncertainty Under Spatial Feature Extraction Through Probabilistic Shape Model (PSM)Document6 pagesHandling Uncertainty Under Spatial Feature Extraction Through Probabilistic Shape Model (PSM)Ijsrnet EditorialNo ratings yet
- Multilevel Classification Scheme For AGV Perception: Naeem Ur Rehman Dr. Sohail Asghar Shahzad Rafiq Irfan Simon FongDocument5 pagesMultilevel Classification Scheme For AGV Perception: Naeem Ur Rehman Dr. Sohail Asghar Shahzad Rafiq Irfan Simon FongBadr U ZamanNo ratings yet
- Ece - Ijeceierd - All New 3Document11 pagesEce - Ijeceierd - All New 3global-marketin8184No ratings yet
- Visual Perception in Hexapod Robot: Volume 1, Issue 3, September - October 2012Document5 pagesVisual Perception in Hexapod Robot: Volume 1, Issue 3, September - October 2012International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- In Campus Location Finder Using Mobile Application Services: Articles You May Be Interested inDocument11 pagesIn Campus Location Finder Using Mobile Application Services: Articles You May Be Interested inmarcoteran007No ratings yet
- Visual Servoing Mobile RobotDocument11 pagesVisual Servoing Mobile RobotYessica RosasNo ratings yet
- 1945 Learning To Explore Using ActiDocument18 pages1945 Learning To Explore Using ActiAhmet TOLUCNo ratings yet
- Science China: Information SciencesDocument11 pagesScience China: Information SciencesDilesh PradhanNo ratings yet
- Integrating Grid-Based and Topological Maps For Mobile Robot NavigationDocument7 pagesIntegrating Grid-Based and Topological Maps For Mobile Robot NavigationRoZz ZaliiNaz GueRraNo ratings yet
- A Review of Probabilistic Map Based TechniquesDocument9 pagesA Review of Probabilistic Map Based TechniquesNguyễn Trường GiangNo ratings yet
- Object Detection Techniques For Mobile Robot Navigation in Dynamic Indoor Environment: A ReviewDocument11 pagesObject Detection Techniques For Mobile Robot Navigation in Dynamic Indoor Environment: A ReviewiajerNo ratings yet
- Learning Driven Coarse-to-Fine Articulated Robot TrackingDocument7 pagesLearning Driven Coarse-to-Fine Articulated Robot TrackingArun KumarNo ratings yet
- (IJCST-V9I1P6) :mohammed Hammoud, Kinda AboukassemDocument14 pages(IJCST-V9I1P6) :mohammed Hammoud, Kinda AboukassemEighthSenseGroupNo ratings yet
- Autonomous Mobile Robot Navigation Using Passive RFID in Indoor EnvironmentDocument8 pagesAutonomous Mobile Robot Navigation Using Passive RFID in Indoor EnvironmentGunasekar R ErNo ratings yet
- Research ProposalDocument5 pagesResearch ProposalHoang HuynhNo ratings yet
- Chaplot Neural Topological SLAM For Visual Navigation CVPR 2020 PaperDocument10 pagesChaplot Neural Topological SLAM For Visual Navigation CVPR 2020 Paperzhenhua wuNo ratings yet
- Mobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningDocument8 pagesMobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningVarun AgarwalNo ratings yet
- ROS Navigation Concepts and TutorialDocument28 pagesROS Navigation Concepts and TutorialvipulNo ratings yet
- Radiation Mapping Using Multiple RobotsDocument6 pagesRadiation Mapping Using Multiple RobotsDaudNo ratings yet
- Vision-Based Localization and Mapping For An Autonomous MowerDocument8 pagesVision-Based Localization and Mapping For An Autonomous Mower柯秉宏No ratings yet
- Optimized Fusion of Multiple Maps Using Fourier Transform and Pearson Correlation - v1Document7 pagesOptimized Fusion of Multiple Maps Using Fourier Transform and Pearson Correlation - v1Luigi Maciel RibeiroNo ratings yet
- Footstep Planning For The Honda ASIMO HumanoidDocument6 pagesFootstep Planning For The Honda ASIMO HumanoidDoryAndrea McNo ratings yet
- Fusing Vision Based Bearing MeasurementsDocument8 pagesFusing Vision Based Bearing MeasurementsAlexandru MatasaruNo ratings yet
- Suma++: Efficient Lidar-Based Semantic SlamDocument8 pagesSuma++: Efficient Lidar-Based Semantic SlamIgnacio VizzoNo ratings yet
- Sensors 24 01222 v2Document30 pagesSensors 24 01222 v2zarrarhaiderabulkhairiNo ratings yet
- CATCHA: Real-Time Camera Tracking Method For Augmented Reality Applications in Cultural Heritage InteriorsDocument19 pagesCATCHA: Real-Time Camera Tracking Method For Augmented Reality Applications in Cultural Heritage InteriorspwzNo ratings yet
- Robot Navigation With Obstacle Avoidance in Unknown EnvironmentDocument1 pageRobot Navigation With Obstacle Avoidance in Unknown EnvironmentNeerendra kumarNo ratings yet
- Tracking with Particle Filter for High-dimensional Observation and State SpacesFrom EverandTracking with Particle Filter for High-dimensional Observation and State SpacesNo ratings yet
- Rossler Chaotic Circuit and It's Application For Communication SecureDocument10 pagesRossler Chaotic Circuit and It's Application For Communication SecureMada Sanjaya WsNo ratings yet
- Check ListDocument6 pagesCheck ListosersNo ratings yet
- CND - Clinical Round ChecklistDocument2 pagesCND - Clinical Round ChecklistMona Ismail AlsomaliNo ratings yet
- Assign 3Document9 pagesAssign 3Yudha PP0% (1)
- Synopsis of Power FactorDocument10 pagesSynopsis of Power FactorRavi TiwariNo ratings yet
- Chapter 1 Introduction To Green BuildingsDocument19 pagesChapter 1 Introduction To Green BuildingsSunil BeheraNo ratings yet
- Hexadecimal To DecimalDocument7 pagesHexadecimal To DecimalMushfik ArafatNo ratings yet
- Pure Sine Wave Inverter For House BackupDocument44 pagesPure Sine Wave Inverter For House BackupKrista Jackson100% (1)
- Agc-4 DRH 4189340686 UkDocument222 pagesAgc-4 DRH 4189340686 UkGiangDoNo ratings yet
- Poloyagan Integrated School Monitoring Tool On Aip ImplementationDocument3 pagesPoloyagan Integrated School Monitoring Tool On Aip ImplementationLALAINE BONILLANo ratings yet
- Analysis Procedure K2co3 PDFDocument3 pagesAnalysis Procedure K2co3 PDFPiyush PatelNo ratings yet
- Reviewer in Hairdressing (From Mastery Test)Document7 pagesReviewer in Hairdressing (From Mastery Test)peanut nutterNo ratings yet
- Dry ContactsDocument2 pagesDry ContactsDiwakar MishraNo ratings yet
- Pedestrian Design Guidelines PDFDocument50 pagesPedestrian Design Guidelines PDFIvan AndradeNo ratings yet
- High Carbon Steel Shot GritDocument2 pagesHigh Carbon Steel Shot Gritabdulaziz mohammedNo ratings yet
- 09 Technical TablesDocument8 pages09 Technical TablesRuban Vijaya SinghNo ratings yet
- Group 2 (ME 03) - Hoa Phat GroupDocument42 pagesGroup 2 (ME 03) - Hoa Phat GroupLê Thành DanhNo ratings yet
- SikaRapid-2 2011-10 - 1 PDFDocument2 pagesSikaRapid-2 2011-10 - 1 PDFmehrdad_so1981No ratings yet
- Tay Township User Fees and Service Charges BylawDocument27 pagesTay Township User Fees and Service Charges BylawMidland_MirrorNo ratings yet
- SEPARATION THEORY - From Basic Separation To ALCAP SystemDocument42 pagesSEPARATION THEORY - From Basic Separation To ALCAP SystemmgbouneNo ratings yet
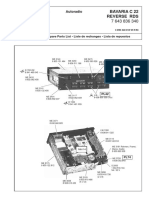
- Bavaria Reverse RdsDocument15 pagesBavaria Reverse RdsDušan JovanovićNo ratings yet
- Annex12 Technical Cards For Accessible ConstructionDocument44 pagesAnnex12 Technical Cards For Accessible Constructionarchitectfemil6663No ratings yet
- Wind Energy Unit-EEEDocument6 pagesWind Energy Unit-EEEpfalencarNo ratings yet
- Reason Key CommandsDocument6 pagesReason Key CommandsVijay KumarNo ratings yet
- Structural Concept - Helix StructureDocument6 pagesStructural Concept - Helix StructurebistsushantNo ratings yet
- A Business Intelligence Framework For The FutureDocument10 pagesA Business Intelligence Framework For The Futuremcalbala100% (1)
- Se MeterDataProcessingDocument83 pagesSe MeterDataProcessingbzkxtNo ratings yet
- Cost BreakdownDocument241 pagesCost Breakdownbilisuma sebokaNo ratings yet
- PCMX Data Eng 01Document13 pagesPCMX Data Eng 01spamNo ratings yet
- Production Support ProcessDocument15 pagesProduction Support ProcesssantoshNo ratings yet