You might also like
- Battery Sizing CalculationDocument3 pagesBattery Sizing CalculationBelos SahajiNo ratings yet
- Electronic Stick For Visually Impaired People Using GSM and GPS TrackingDocument64 pagesElectronic Stick For Visually Impaired People Using GSM and GPS TrackingShree KanthNo ratings yet
- Smart Stick For Visually ImpairedDocument6 pagesSmart Stick For Visually ImpairedAnonymous izrFWiQNo ratings yet
- Smart Blind StickDocument4 pagesSmart Blind StickInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Blind Stick Using ArduinoDocument7 pagesSmart Blind Stick Using ArduinoiyoasNo ratings yet
- Ultrasonic Smart Glasses For BlindDocument4 pagesUltrasonic Smart Glasses For BlindPhani ReddyNo ratings yet
- Ai Glass 1Document6 pagesAi Glass 1Magar AnzelNo ratings yet
- Kamrul 2020 Ijais 451841Document6 pagesKamrul 2020 Ijais 451841kannan RNo ratings yet
- Smart Stick For Blind Using Raspberry Pi: Akhila. S Disha M RaniDocument3 pagesSmart Stick For Blind Using Raspberry Pi: Akhila. S Disha M RaniAbdo ZezoNo ratings yet
- YoloV4 Based Object Detection For Blind StickDocument5 pagesYoloV4 Based Object Detection For Blind StickInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Assistive Object Recognition System For Visually Impaired IJERTV9IS090382Document5 pagesAssistive Object Recognition System For Visually Impaired IJERTV9IS090382ABD BESTNo ratings yet
- BlindDocument24 pagesBlindNivasNo ratings yet
- Mini Project 6th SEMDocument24 pagesMini Project 6th SEMInvincible 2.0No ratings yet
- Low Cost Ultrasonic Smart Glasses For Blind: Rajasthan, India Rajasthan, India Rajasthan, India Rajasthan, IndiaDocument4 pagesLow Cost Ultrasonic Smart Glasses For Blind: Rajasthan, India Rajasthan, India Rajasthan, India Rajasthan, IndiaVaibhav PatilNo ratings yet
- Visual Assistant Using Raspberry Pi For Blind PeopleDocument6 pagesVisual Assistant Using Raspberry Pi For Blind PeopleIJRASETPublicationsNo ratings yet
- Vision 1Document25 pagesVision 1Ritesh TamangNo ratings yet
- 1st Review PPT FinishedDocument11 pages1st Review PPT FinishedSriNo ratings yet
- Blind Stick Using Ultrasonic Sensor With Voice AnnouncementDocument5 pagesBlind Stick Using Ultrasonic Sensor With Voice AnnouncementIJRASETPublicationsNo ratings yet
- Synopsis THIRD EYE FOR THE BLINDDocument23 pagesSynopsis THIRD EYE FOR THE BLINDNirjhar FilmsNo ratings yet
- Preprint Not Peer Reviewed: Iot Based Shoe Eye Strewing New-Fangled Vision For Visually Impaired OnesDocument3 pagesPreprint Not Peer Reviewed: Iot Based Shoe Eye Strewing New-Fangled Vision For Visually Impaired Onesamta nadeemNo ratings yet
- Irjet V7i3567 PDFDocument6 pagesIrjet V7i3567 PDFSagor SahaNo ratings yet
- 130 - Visually ImpairedDocument22 pages130 - Visually ImpairedShree KanthNo ratings yet
- Smart Blind Stick Using IOTDocument9 pagesSmart Blind Stick Using IOTIJRASETPublicationsNo ratings yet
- Low Cost Ultrasonic Smart Glasses For Blind: October 2017Document5 pagesLow Cost Ultrasonic Smart Glasses For Blind: October 2017ابو علي الحيدريNo ratings yet
- Smart Gloves For BlindDocument5 pagesSmart Gloves For BlindLois Moyano0% (1)
- Voice Assisted Blind Stick Using Ultrasonic SensorDocument3 pagesVoice Assisted Blind Stick Using Ultrasonic SensorOzigi abdulrasaqNo ratings yet
- Updated Cpe 1Document34 pagesUpdated Cpe 138 aarti dhageNo ratings yet
- Third Eye For Blind People-1Document4 pagesThird Eye For Blind People-1FarheenNo ratings yet
- A Smart Blind Stick For Aiding Visually Impaired PeopleDocument3 pagesA Smart Blind Stick For Aiding Visually Impaired PeopleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Man Capi - R2 PDFDocument6 pagesMan Capi - R2 PDFIshu ReddyNo ratings yet
- SmartblindstickprojectDocument9 pagesSmartblindstickprojectDeepika RadhaNo ratings yet
- Assist Ive Technology For Visual ImpairmentDocument15 pagesAssist Ive Technology For Visual Impairmentkannan RNo ratings yet
- A Smart Wearable Guiding Device For The Visually Impaired PeopleDocument7 pagesA Smart Wearable Guiding Device For The Visually Impaired PeopleIJRASETPublicationsNo ratings yet
- An INDOOR NAVIGATION SYSTEM For VISUALLY IMpaired People Using A Path Finding Wearable CapDocument6 pagesAn INDOOR NAVIGATION SYSTEM For VISUALLY IMpaired People Using A Path Finding Wearable CapSuesarn WilainuchNo ratings yet
- Phase 1 ProjectDocument18 pagesPhase 1 ProjectVineeth ShandilyaNo ratings yet
- Blind Persons Aid For Indoor Movement Using RFIDDocument6 pagesBlind Persons Aid For Indoor Movement Using RFIDSajid BashirNo ratings yet
- Aa 11Document6 pagesAa 11Muhammad Sheharyar MohsinNo ratings yet
- SmartblindstickDocument5 pagesSmartblindstickSatyam kumar SinghNo ratings yet
- IOT Based Obstacle Detector System For Blind People: Preparing StudentsDocument31 pagesIOT Based Obstacle Detector System For Blind People: Preparing Studentsكل شيء every thingNo ratings yet
- Blind People Helping HandDocument18 pagesBlind People Helping HandIJRASETPublicationsNo ratings yet
- Iwalk: Intelligent Walking Stick For Visually Impaired SubjectsDocument5 pagesIwalk: Intelligent Walking Stick For Visually Impaired SubjectsrakeshNo ratings yet
- Aralikatti 2020 J. Phys. Conf. Ser. 1706 012149Document13 pagesAralikatti 2020 J. Phys. Conf. Ser. 1706 012149Viney ChhillarNo ratings yet
- Smart Walking Stick For Visually Impaired People U PDFDocument13 pagesSmart Walking Stick For Visually Impaired People U PDFTikam SuvasiyaNo ratings yet
- Madona 2020 IOP Conf. Ser. Mater. Sci. Eng. 846 012032Document11 pagesMadona 2020 IOP Conf. Ser. Mater. Sci. Eng. 846 012032RõČķ BőÝNo ratings yet
- Real Time Obj Detect For BlindDocument6 pagesReal Time Obj Detect For Blinddata proNo ratings yet
- Stick For Helping The Blind PersonDocument6 pagesStick For Helping The Blind PersonIJRASETPublicationsNo ratings yet
- Smart Cane A Machine Learning-Powered Assistive DeviceDocument10 pagesSmart Cane A Machine Learning-Powered Assistive DeviceIJRASETPublicationsNo ratings yet
- Image Processing and Bone Conduction For Deaf and Blind PeopleDocument5 pagesImage Processing and Bone Conduction For Deaf and Blind PeopleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Safety Guard For Blind Using 8051: Saneesh C T, Deepashree A V, Gagana Divya, Trupti AgrawalDocument2 pagesSafety Guard For Blind Using 8051: Saneesh C T, Deepashree A V, Gagana Divya, Trupti AgrawalAnanthu J VNo ratings yet
- Smart and Cost-Effective Device For Visually Impaired PeopleDocument5 pagesSmart and Cost-Effective Device For Visually Impaired PeopleajiNo ratings yet
- Third Eye For The Blind Using Arduino and Ultrasonic SensorsDocument5 pagesThird Eye For The Blind Using Arduino and Ultrasonic SensorssumaniceNo ratings yet
- Integrated Smart Shoe For Blind People: M.V.S.Divija, M.Rohitha, Meghana.T, Monisha.H, Prof - RaveendraDocument5 pagesIntegrated Smart Shoe For Blind People: M.V.S.Divija, M.Rohitha, Meghana.T, Monisha.H, Prof - RaveendraSachin ShivannavarNo ratings yet
- ReportDocument32 pagesReport43FYCM II Sujal NeveNo ratings yet
- Smart Walking Stick For Blind PersonDocument6 pagesSmart Walking Stick For Blind PersonBOURAS Ihabe - بوراس إيهابNo ratings yet
- Iarjset 2022 9420Document5 pagesIarjset 2022 9420snookiedoo1105No ratings yet
- Object Detection System With Voice Alert For BlindDocument7 pagesObject Detection System With Voice Alert For BlindIJRASETPublicationsNo ratings yet
- "Blind Indoor Navigation Using Ultrasonic Sensor": Submitted To: Prof. Anand Kumar SDocument13 pages"Blind Indoor Navigation Using Ultrasonic Sensor": Submitted To: Prof. Anand Kumar SAvk Aryan Vishant KulshreshthaNo ratings yet
- Traffic Signal Time Analysis and Voice - Based App For Visually Impaired PedestriansDocument4 pagesTraffic Signal Time Analysis and Voice - Based App For Visually Impaired PedestriansifyNo ratings yet
- Ismail 2016 IOP Conf. Ser. Mater. Sci. Eng. 152 012064Document7 pagesIsmail 2016 IOP Conf. Ser. Mater. Sci. Eng. 152 012064Pham Thanh HaiNo ratings yet
- Virtual Eye For Blind People Using Deep LearningDocument8 pagesVirtual Eye For Blind People Using Deep LearningIJRASETPublicationsNo ratings yet
- Blue Eye Technology: Presented by Vasani Hiral M. Guided by MR - Dhaval SinghDocument25 pagesBlue Eye Technology: Presented by Vasani Hiral M. Guided by MR - Dhaval SinghHiral VasaniNo ratings yet
- MaxEye BMS HIL Test System White Paper V1 2Document9 pagesMaxEye BMS HIL Test System White Paper V1 2ahmedhamdi731No ratings yet
- Class 12 Physics Revision Notes Electromagnetic InductionDocument30 pagesClass 12 Physics Revision Notes Electromagnetic InductionTanureet kaurNo ratings yet
- Cordless Paint Sprayer Pfsa 20-Li A1Document48 pagesCordless Paint Sprayer Pfsa 20-Li A1trfihomeNo ratings yet
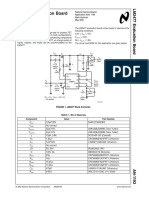
- LM3477 Evaluation Board: National Semiconductor Application Note 1193 Mark Hartman May 2001Document5 pagesLM3477 Evaluation Board: National Semiconductor Application Note 1193 Mark Hartman May 2001lennon rNo ratings yet
- Quote - DC Power SourceDocument2 pagesQuote - DC Power SourcePratham AroraNo ratings yet
- Australian Standard: Design For Access and MobilityDocument105 pagesAustralian Standard: Design For Access and MobilityMiroslav ThôngNo ratings yet
- Canalis KN Kna160ab4Document2 pagesCanalis KN Kna160ab4Glenn Midel Delos SantosNo ratings yet
- Manual Barrera EnforcerDocument12 pagesManual Barrera EnforcerDiego Y Tatiana Barona DuqueNo ratings yet
- mpl-h11s ManualDocument37 pagesmpl-h11s Manualvũ trầnNo ratings yet
- Differential Pressuer SensorDocument6 pagesDifferential Pressuer SensorAhmed MoharramNo ratings yet
- Speaking Quý 3Document22 pagesSpeaking Quý 3hienarmylovesugaNo ratings yet
- UM1461 - STM3240G Evaluation Board - en - DM00036746Document67 pagesUM1461 - STM3240G Evaluation Board - en - DM00036746_download_only_No ratings yet
- Operation and Maintenance of A 220 132KV SubstationDocument45 pagesOperation and Maintenance of A 220 132KV Substationmk0558572No ratings yet
- 6 I&s 3160620 QB 2022Document2 pages6 I&s 3160620 QB 2022HARSH HAMIRANINo ratings yet
- Sense AmplifiersDocument6 pagesSense AmplifierskeerthiNo ratings yet
- GSM Alarm System: User's ManualDocument39 pagesGSM Alarm System: User's ManualRigo AndreseNo ratings yet
- VAV TypesDocument39 pagesVAV TypesmpwasaNo ratings yet
- Terahertz Antenna Based On GrapheneDocument4 pagesTerahertz Antenna Based On Graphenerajesh yadavNo ratings yet
- DSE9701 & DSE9702: Vertical 5 Amp Battery ChargersDocument2 pagesDSE9701 & DSE9702: Vertical 5 Amp Battery Chargersasuhuane100% (1)
- OR LightDocument14 pagesOR LightZoubir AouagNo ratings yet
- FS20SM 12Document5 pagesFS20SM 12Imran Ali ShahNo ratings yet
- Lab9 MeasurementandaccuracyofdigitalmultimeterDocument12 pagesLab9 MeasurementandaccuracyofdigitalmultimeterdharwinNo ratings yet
- Data Sheet - MI 5 Interface UnitDocument2 pagesData Sheet - MI 5 Interface UnitleonNo ratings yet
- The Output of Ac Generator Is:: E E Sinwt (E Nbaw) E - (D/DT) (Ø)Document36 pagesThe Output of Ac Generator Is:: E E Sinwt (E Nbaw) E - (D/DT) (Ø)Lasya notesNo ratings yet
- Intel 12th Gen Core, Alder LakeDocument2 pagesIntel 12th Gen Core, Alder LakeP HandokoNo ratings yet
- METSEDM6200: Product Data SheetDocument3 pagesMETSEDM6200: Product Data SheetKiran KarthikNo ratings yet
- Television: GB CTDocument16 pagesTelevision: GB CTMahesh VeNo ratings yet
- Power System Operation and Control (18EE81) 20 3-2: Mr. Mohan B S Assistant ProfessorDocument14 pagesPower System Operation and Control (18EE81) 20 3-2: Mr. Mohan B S Assistant ProfessorSupriya Gowda100% (1)