You might also like
- A Report On Industrial VisitDocument15 pagesA Report On Industrial VisitChandni Bhagchandani100% (1)
- Mazak M Code List - INTEGREX - Helman CNC PDFDocument10 pagesMazak M Code List - INTEGREX - Helman CNC PDFIsaias MNo ratings yet
- Human Action Recognition using Factorized Spatio-Temporal CNNsDocument9 pagesHuman Action Recognition using Factorized Spatio-Temporal CNNsMohit KumarNo ratings yet
- 2018 01 Green Urban AreaDocument16 pages2018 01 Green Urban AreaCerasella GoiaNo ratings yet
- CNN-based and DTW Features For Human Activity Recognition On Depth MapsDocument14 pagesCNN-based and DTW Features For Human Activity Recognition On Depth Mapsjacekt89No ratings yet
- Action RecognitionDocument14 pagesAction RecognitionJ SANDHYANo ratings yet
- Embedded Features For 1D CNN-based Action Recognition On Depth MapsDocument13 pagesEmbedded Features For 1D CNN-based Action Recognition On Depth Mapsjacekt89No ratings yet
- Human Action Recognition On Raw Depth MapsDocument13 pagesHuman Action Recognition On Raw Depth Mapsjacekt89No ratings yet
- Human Activity Recognition Process Using 3-D Posture DataDocument12 pagesHuman Activity Recognition Process Using 3-D Posture DataJojo SeseNo ratings yet
- Ufc Sports DataDocument10 pagesUfc Sports DataAnsh 007No ratings yet
- 2 Convolutional Neural Network For Image ClassificationDocument6 pages2 Convolutional Neural Network For Image ClassificationKompruch BenjaputharakNo ratings yet
- Cite 256 Action Recognition Based On Joint Trajectory Maps Using Convolutional Neural Networks ACM M 2017Document5 pagesCite 256 Action Recognition Based On Joint Trajectory Maps Using Convolutional Neural Networks ACM M 2017姜华为No ratings yet
- Skeleton Based Human Action Recognition Using A Structured-Tree Neural NetworkDocument6 pagesSkeleton Based Human Action Recognition Using A Structured-Tree Neural NetworkArs Arifur RahmanNo ratings yet
- Wang - Human Action Recognition Algorithm Based On Multi-Feature Map Fusion - 2020Document9 pagesWang - Human Action Recognition Algorithm Based On Multi-Feature Map Fusion - 2020masoud kiaNo ratings yet
- Concurrent Activity Recognition with Multimodal CNN-LSTM StructureDocument14 pagesConcurrent Activity Recognition with Multimodal CNN-LSTM StructurefediNo ratings yet
- Qian 2015Document10 pagesQian 2015FrankNo ratings yet
- Adaptive Anchor Networks For Multi-Scale Object Detection in Remote Sensing ImagesDocument14 pagesAdaptive Anchor Networks For Multi-Scale Object Detection in Remote Sensing ImagesJessica CostaNo ratings yet
- Real Time Object Detection Using CNNDocument5 pagesReal Time Object Detection Using CNNyevanNo ratings yet
- Human Activity RGDBDocument15 pagesHuman Activity RGDBsushanprazNo ratings yet
- Convolutional Neural Network For Satellite Image ClassificationDocument14 pagesConvolutional Neural Network For Satellite Image Classificationwilliam100% (1)
- Feature Fusion Based On Convolutional Neural Netwo PDFDocument8 pagesFeature Fusion Based On Convolutional Neural Netwo PDFNguyễn Thành TânNo ratings yet
- 2 PBDocument5 pages2 PBJulianto SaputroNo ratings yet
- 3D Convolutional Neural Networks For Human Action RecognitionDocument11 pages3D Convolutional Neural Networks For Human Action RecognitionaditriadiNo ratings yet
- Applied Soft Computing Journal: Leiyue Yao, Wei Yang, Wei HuangDocument10 pagesApplied Soft Computing Journal: Leiyue Yao, Wei Yang, Wei HuangFriji RachaNo ratings yet
- Journaluploads 498can Skeletal Joint Positional Ordering Influence Action Recognition On Spectrally Graded CNNs A Perspective On Achieving Joint Order Independent LearningDocument16 pagesJournaluploads 498can Skeletal Joint Positional Ordering Influence Action Recognition On Spectrally Graded CNNs A Perspective On Achieving Joint Order Independent Learningsiri.pogulaNo ratings yet
- Deep Progressive Reinforcement Learning for Skeleton-Based Action RecognitionDocument10 pagesDeep Progressive Reinforcement Learning for Skeleton-Based Action RecognitionTruong GiangNo ratings yet
- 3D CNNs for Human Action Recognition in VideosDocument11 pages3D CNNs for Human Action Recognition in VideosLUCAS HAASNo ratings yet
- Human Body Orientation Estimation Using Convolutional Neural NetworkDocument5 pagesHuman Body Orientation Estimation Using Convolutional Neural Networkbukhtawar zamirNo ratings yet
- Spatial-Temporal Fusion Convolutional Neural Network For Simulated Driving Behavior RecognitionDocument7 pagesSpatial-Temporal Fusion Convolutional Neural Network For Simulated Driving Behavior RecognitionBOUMARAF IbtissamNo ratings yet
- Simulation: Deep learning object recognition for autonomous vehiclesDocument11 pagesSimulation: Deep learning object recognition for autonomous vehiclesDaryAntoNo ratings yet
- CNNs Improve Activity Recognition with Mobile SensorsDocument18 pagesCNNs Improve Activity Recognition with Mobile SensorsAlan BensonNo ratings yet
- Monocular Depth Estimation Based On Deep Learning An OverviewDocument16 pagesMonocular Depth Estimation Based On Deep Learning An OverviewJ SpencerNo ratings yet
- Deep Convolutional Neural Networks For The Classification of Snapshot Mosaic Hyperspectral ImageryDocument6 pagesDeep Convolutional Neural Networks For The Classification of Snapshot Mosaic Hyperspectral ImageryRochelle LeeNo ratings yet
- Paper 82-Hyperspectral Image ClassificationDocument7 pagesPaper 82-Hyperspectral Image ClassificationDharmi JaviyaNo ratings yet
- LSTM Networks For Mobile Human Activity Recognition: Yuwen Chen, Kunhua Zhong, Ju Zhang, Qilong Sun and Xueliang ZhaoDocument4 pagesLSTM Networks For Mobile Human Activity Recognition: Yuwen Chen, Kunhua Zhong, Ju Zhang, Qilong Sun and Xueliang ZhaojuansunandarNo ratings yet
- Journal Tiis 11-2 TIISVol11No2-28Document16 pagesJournal Tiis 11-2 TIISVol11No2-28pofufoNo ratings yet
- 2023Efficient_Deep_Learning_Approach_to_Recognize_Person_Attributes_by_Using_Hybrid_Transformers_for_Surveillance_ScenariosDocument13 pages2023Efficient_Deep_Learning_Approach_to_Recognize_Person_Attributes_by_Using_Hybrid_Transformers_for_Surveillance_ScenariosEng-Ali Al-madaniNo ratings yet
- FPGA - Based Accelerators of Deep LearningNetworks For Learning and ClassificationDocument37 pagesFPGA - Based Accelerators of Deep LearningNetworks For Learning and ClassificationAvinash Baldi100% (1)
- Sensors: Depth Estimation and Semantic Segmentation From A Single RGB Image Using A Hybrid Convolutional Neural NetworkDocument20 pagesSensors: Depth Estimation and Semantic Segmentation From A Single RGB Image Using A Hybrid Convolutional Neural NetworkKratika VarshneyNo ratings yet
- DIGI-Net: A Deep Convolutional Neural Network For Multi-Format Digit RecognitionDocument11 pagesDIGI-Net: A Deep Convolutional Neural Network For Multi-Format Digit RecognitionHuseyin KusetogullariNo ratings yet
- IMINT Target Acquisition Using Deep LearningDocument5 pagesIMINT Target Acquisition Using Deep LearningGhazi MarzoukNo ratings yet
- Human Activity Recognition Based On Time Series Analysis Using U-NetDocument21 pagesHuman Activity Recognition Based On Time Series Analysis Using U-NetEzequiel França Dos SantosNo ratings yet
- Sequential Deep Learning For Human Action Recognition: 1 Introduction and Related WorkDocument2 pagesSequential Deep Learning For Human Action Recognition: 1 Introduction and Related WorkSHADAKSHARI ARUTAGINo ratings yet
- Design and Implementation of A Convolutional NeuraDocument11 pagesDesign and Implementation of A Convolutional NeuraFASAKIN OLUWASEYINo ratings yet
- Monocular Depth Estimation Based On Deep Learning: An OverviewDocument14 pagesMonocular Depth Estimation Based On Deep Learning: An OverviewSomya swarya naikNo ratings yet
- Pramono Hierarchical Self-Attention Network For Action Localization in Videos ICCV 2019 PaperDocument10 pagesPramono Hierarchical Self-Attention Network For Action Localization in Videos ICCV 2019 Papervishalk172No ratings yet
- Action Recognition Using Attention-Joints Graph Convolutional Neural NetworksDocument9 pagesAction Recognition Using Attention-Joints Graph Convolutional Neural NetworksTruong GiangNo ratings yet
- Spatial-Temporal Information Aggregation and Cross-Modality Interactive Learning For RGB-D-Based Human Action RecognitionDocument12 pagesSpatial-Temporal Information Aggregation and Cross-Modality Interactive Learning For RGB-D-Based Human Action RecognitionPrajwal GNo ratings yet
- Implementation of A Batch Normalized Deep LSTM Recurrent Network On A Smartphone For Human Activity RecognitionDocument4 pagesImplementation of A Batch Normalized Deep LSTM Recurrent Network On A Smartphone For Human Activity RecognitionbaggertetshanghuttNo ratings yet
- Motion Fused Frames: Data Level Fusion Strategy For Hand Gesture RecognitionDocument9 pagesMotion Fused Frames: Data Level Fusion Strategy For Hand Gesture RecognitionFsha MerhawitNo ratings yet
- (IJCST-V10I5P12) :mrs J Sarada, P Priya BharathiDocument6 pages(IJCST-V10I5P12) :mrs J Sarada, P Priya BharathiEighthSenseGroupNo ratings yet
- Applied Sciences: Deep Learning Based Human Activity Recognition Using Spatio-Temporal Image Formation of Skeleton JointsDocument24 pagesApplied Sciences: Deep Learning Based Human Activity Recognition Using Spatio-Temporal Image Formation of Skeleton JointsArs Arifur RahmanNo ratings yet
- Design and Implementation of A Convolutional Neural Network On An Edge Computing Smartphone For Human Activity RecognitionDocument12 pagesDesign and Implementation of A Convolutional Neural Network On An Edge Computing Smartphone For Human Activity Recognitionsdjnsj jnjcdejnewNo ratings yet
- Prakash2019 - Face RecognitionDocument4 pagesPrakash2019 - Face Recognitioneshwari2000No ratings yet
- Ruan 2019Document5 pagesRuan 2019Nirban DasNo ratings yet
- ObjectdetectionDocument7 pagesObjectdetectionAnonymous buSPtQ8F0uNo ratings yet
- Image Segmentation For Object Detection Using Mask R-CNN in ColabDocument5 pagesImage Segmentation For Object Detection Using Mask R-CNN in ColabGRD JournalsNo ratings yet
- Action Recognition Using Hierarchical Dynamic Bayesian NetworkDocument14 pagesAction Recognition Using Hierarchical Dynamic Bayesian Networkart queenNo ratings yet
- 3D CNN For Human Action Recognition: Conference PaperDocument7 pages3D CNN For Human Action Recognition: Conference PaperHrishikeshNo ratings yet
- Mask RCNN for Multi-Class Semantic Segmentation of Indoor ScenesDocument13 pagesMask RCNN for Multi-Class Semantic Segmentation of Indoor ScenesAadith Thillai Arasu SNo ratings yet
- Development of A Hand Pose Recognition System On An Embedded Computer Using Artificial IntelligenceDocument4 pagesDevelopment of A Hand Pose Recognition System On An Embedded Computer Using Artificial IntelligenceGraceSevillanoNo ratings yet
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Uncovering Misconceptions in GNSS Precise Point PositioningDocument10 pagesUncovering Misconceptions in GNSS Precise Point PositioningChethan Kumar RENo ratings yet
- IOT Based Accident Prevention and Detection System Using GSM-GPS, Eye Blink, and Alcohol SensorDocument8 pagesIOT Based Accident Prevention and Detection System Using GSM-GPS, Eye Blink, and Alcohol SensorIJRASETPublicationsNo ratings yet
- E35 Parts List CAP934Document6 pagesE35 Parts List CAP934robertNo ratings yet
- Major Project SynopsisDocument11 pagesMajor Project SynopsisSankalp VarshneyNo ratings yet
- XPAIB006EN I RefGuide InstrSW WebDocument41 pagesXPAIB006EN I RefGuide InstrSW WebXavier ArévaloNo ratings yet
- Lte Performance Analysis On 800 and 1800 MHZ BandsDocument96 pagesLte Performance Analysis On 800 and 1800 MHZ BandsAttila KovácsNo ratings yet
- Design and Optimization of Modular Production System Distribution and Pick & Place StationDocument9 pagesDesign and Optimization of Modular Production System Distribution and Pick & Place StationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Release 445 Driver For Windows, Version 445.87Document39 pagesRelease 445 Driver For Windows, Version 445.87Abid ArifNo ratings yet
- SSV 2019 - Wiring Diagram - 219100978 - WD91Y019S10 - enDocument9 pagesSSV 2019 - Wiring Diagram - 219100978 - WD91Y019S10 - enAlex CachuNo ratings yet
- AtardecerDocument6 pagesAtardecerfranklinNo ratings yet
- DSAL Lab ManualDocument61 pagesDSAL Lab Manualr.bunny.0022No ratings yet
- Line CodingDocument16 pagesLine CodingAitzaz HussainNo ratings yet
- Bs 5467 Copper Conductor Multi Core Swa PVC 1 9 3 3kv CableDocument2 pagesBs 5467 Copper Conductor Multi Core Swa PVC 1 9 3 3kv CableSaqib JavedNo ratings yet
- Mah 0000 Me Li 002 00Document39 pagesMah 0000 Me Li 002 00rezaNo ratings yet
- PIC hardware quick reference guide under 40 charactersDocument3 pagesPIC hardware quick reference guide under 40 charactersJojonNo ratings yet
- MIR - Silencers - Catalog Miratech Marine Self SubSeaDocument60 pagesMIR - Silencers - Catalog Miratech Marine Self SubSeaFernando BarbosaNo ratings yet
- 4 Job Interviews and Career Part 2Document2 pages4 Job Interviews and Career Part 2lala inriyaniNo ratings yet
- Oferta Bodor: Model (E) Pret ( Fara TVA) Garantie Modele CO2Document3 pagesOferta Bodor: Model (E) Pret ( Fara TVA) Garantie Modele CO2Librarie PapetarieNo ratings yet
- OperationManual ASE 2Document74 pagesOperationManual ASE 2Masoom Sawaira DhmNo ratings yet
- Collection of Dried Cocoa BeansDocument2 pagesCollection of Dried Cocoa BeansRoushanNo ratings yet
- Pentode JJ Ef806sDocument2 pagesPentode JJ Ef806sCristianNo ratings yet
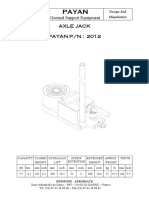
- Payan: Axle Jack PAYAN P/N: 2012Document38 pagesPayan: Axle Jack PAYAN P/N: 2012gmailNo ratings yet
- PD24 Sales SheetDocument2 pagesPD24 Sales SheetComunicación Visual mARTaderoNo ratings yet
- History and Working Principle of CNC MachinesDocument308 pagesHistory and Working Principle of CNC MachinesYash IngleNo ratings yet
- Cessna 208 (Caravan) : Standard De-Ice BootsDocument174 pagesCessna 208 (Caravan) : Standard De-Ice BootsNaguibNo ratings yet
- DH-HAC-B2A21: 2MP HDCVI IR Bullet CameraDocument3 pagesDH-HAC-B2A21: 2MP HDCVI IR Bullet CameraDenis RodriguezNo ratings yet
- NURS FPX 6612 Assessment 2 Quality Improvement ProposalDocument6 pagesNURS FPX 6612 Assessment 2 Quality Improvement Proposalzadem5266No ratings yet