You might also like
- FMC TFM - Inspection SystemDocument9 pagesFMC TFM - Inspection SystemAnonymous 5qPKvmuTWCNo ratings yet
- 7 GinzelDocument12 pages7 GinzelMahade Hasan Dipu100% (1)
- FMC/TFM Experimental Comparisons: Articles You May Be Interested inDocument6 pagesFMC/TFM Experimental Comparisons: Articles You May Be Interested inPetrNo ratings yet
- TFM Imaging of Aeroengine Casing Ring Forgings With Curved - 2022 - Chinese JourDocument15 pagesTFM Imaging of Aeroengine Casing Ring Forgings With Curved - 2022 - Chinese Jourguy bassotNo ratings yet
- Wrinkle_measurement_comparing_ultrasonic_techniques_accepted_manuscriptDocument29 pagesWrinkle_measurement_comparing_ultrasonic_techniques_accepted_manuscriptAlexandru AlexNo ratings yet
- Holographic and Shearographic NDT Application in Aerospace ManufacturingDocument5 pagesHolographic and Shearographic NDT Application in Aerospace ManufacturingPDDELUCANo ratings yet
- Thermal Compensation of Ultrasonic Transmit and Receive Dat 2023 NDT E IntDocument15 pagesThermal Compensation of Ultrasonic Transmit and Receive Dat 2023 NDT E IntmaheshNo ratings yet
- Robust Optimal H /H Fault Detection and Its Applications in A TGSCM Control SystemDocument14 pagesRobust Optimal H /H Fault Detection and Its Applications in A TGSCM Control SystemDavids MarinNo ratings yet
- Broken Rotor Bar Fault Detection of Induction Motors Using A Joint Algorithm of Trust Region and Modified Bare-Bones Particle Swarm OptimizationDocument14 pagesBroken Rotor Bar Fault Detection of Induction Motors Using A Joint Algorithm of Trust Region and Modified Bare-Bones Particle Swarm Optimizationsathishkumar BNo ratings yet
- 14 Holloway.Document14 pages14 Holloway.MAYUR RAVATNo ratings yet
- Extracting Modal Parameters of Ultrasonic Bar Horns From ESPI FRF DataDocument8 pagesExtracting Modal Parameters of Ultrasonic Bar Horns From ESPI FRF Datag mailNo ratings yet
- Applsci 09 02060Document18 pagesApplsci 09 02060Rajesh RastogyNo ratings yet
- Polymers 11 00523Document11 pagesPolymers 11 00523Rogério JuniorNo ratings yet
- Mechanical Systems and Signal Processing: Lingmi Zhang, Tong Wang, Yukio TamuraDocument13 pagesMechanical Systems and Signal Processing: Lingmi Zhang, Tong Wang, Yukio TamuraGiacomo EspositoNo ratings yet
- Et Paper Brandon RevisedDocument8 pagesEt Paper Brandon RevisedTRUNG QUOC LENo ratings yet
- A Study of Rolling-Element Bearing Fault Diagnosis Using Motor's Vibration and Current SignaturesDocument6 pagesA Study of Rolling-Element Bearing Fault Diagnosis Using Motor's Vibration and Current Signaturesangello_mani8085No ratings yet
- FMC TFM Experimental Comparisons (44th Annual Review of Progress in Quantitative Nondestructive Evaluation, Volume 37)Document5 pagesFMC TFM Experimental Comparisons (44th Annual Review of Progress in Quantitative Nondestructive Evaluation, Volume 37)pjhollowNo ratings yet
- 3D Printing Turbine BladesDocument21 pages3D Printing Turbine Blades19MECH052 SYED YOUNUSNo ratings yet
- Weld Defect Imaging and Characterisation Using PAUT and TFM Ultrasonic NDTDocument10 pagesWeld Defect Imaging and Characterisation Using PAUT and TFM Ultrasonic NDTAmar HassanNo ratings yet
- NDT and E International: Stewart G. Haslinger, Michael.J.S. Lowe, Zhengjun Wang, Fan ShiDocument14 pagesNDT and E International: Stewart G. Haslinger, Michael.J.S. Lowe, Zhengjun Wang, Fan ShiChonkarn ChieblamNo ratings yet
- Accurate Sizing of Weld Defects Using Ultrasonic TOFDDocument7 pagesAccurate Sizing of Weld Defects Using Ultrasonic TOFD1339979No ratings yet
- Muffler DesignDocument8 pagesMuffler Designjeyaselvanm0% (1)
- Modal Analysis of Cantilever Beam Structure Using Finite Element Analysis and Experimental AnalysisDocument8 pagesModal Analysis of Cantilever Beam Structure Using Finite Element Analysis and Experimental AnalysisAJER JOURNALNo ratings yet
- 1 - Paul Doru Barsanescu PDFDocument8 pages1 - Paul Doru Barsanescu PDF冰冰No ratings yet
- Composites Part BDocument13 pagesComposites Part Bbhavaniprasad478No ratings yet
- Research ArticleDocument16 pagesResearch ArticleMuneer AhmedNo ratings yet
- Phasor XS Flange Face PaperDocument32 pagesPhasor XS Flange Face PapervrapciudorianNo ratings yet
- Ultrasonic Phased Array Inspection of Welded Pipes Using Mode Converted WavesDocument8 pagesUltrasonic Phased Array Inspection of Welded Pipes Using Mode Converted WavesMohsin IamNo ratings yet
- Kecheng ISMLGDocument2 pagesKecheng ISMLGLuo ZhiNo ratings yet
- Robotic Non-Destructive InspectionDocument8 pagesRobotic Non-Destructive InspectionFadhli AzinnuddinNo ratings yet
- Insight s7Document7 pagesInsight s7rhinemineNo ratings yet
- Inspect Flange Joints for Corrosion Using Phased ArrayDocument54 pagesInspect Flange Joints for Corrosion Using Phased ArrayDeepak100% (2)
- Frequency Phase Space Empirical Wavelet Transform For Rolling Bearings Fault DiagnosisDocument13 pagesFrequency Phase Space Empirical Wavelet Transform For Rolling Bearings Fault DiagnosisPraveen kumarNo ratings yet
- AE MattDocument18 pagesAE MattKaterina MurinsNo ratings yet
- NDT UltrasonicDocument15 pagesNDT Ultrasonicromeoamu87No ratings yet
- Access 2017 2773460Document16 pagesAccess 2017 2773460captain americaNo ratings yet
- Simulation of guided-wave ultrasound propagation in composite laminates compared across codesDocument28 pagesSimulation of guided-wave ultrasound propagation in composite laminates compared across codesHiram RoblesNo ratings yet
- Applied Mathematics and Computation: S.C. Mohan, D.K. Maiti, D. MaityDocument14 pagesApplied Mathematics and Computation: S.C. Mohan, D.K. Maiti, D. MaitySwarup BarmanNo ratings yet
- Far Field Prediction From Near Field of PCBDocument5 pagesFar Field Prediction From Near Field of PCBgokarnaNo ratings yet
- How To Evaluate BoatsDocument14 pagesHow To Evaluate BoatsJuniorJavier Olivo FarreraNo ratings yet
- Recent Developments in Ultrasonic NDT Modelling in CIVADocument7 pagesRecent Developments in Ultrasonic NDT Modelling in CIVAcal2_uniNo ratings yet
- ISO 9001 2015 TrainingDocument242 pagesISO 9001 2015 TrainingDurgamadhaba MishraNo ratings yet
- Moll 2018Document12 pagesMoll 2018Guillermo AzuaraNo ratings yet
- Fiber Bragg CFR PDocument7 pagesFiber Bragg CFR PAswin HaridasNo ratings yet
- 85510876-01282137 ZiyyatDocument10 pages85510876-01282137 ZiyyatBOUZIANE AmineNo ratings yet
- 01 Wirtz GearTransmissionMonitoringDocument14 pages01 Wirtz GearTransmissionMonitoringdusan cincarNo ratings yet
- 2024-Detectability by X-ray Micro Computed Tomography of Fatigue Initiating Void Defects in Laser Powder-bed Additively Manufactured Ti-6Al-4V CouponsDocument17 pages2024-Detectability by X-ray Micro Computed Tomography of Fatigue Initiating Void Defects in Laser Powder-bed Additively Manufactured Ti-6Al-4V CouponsbqfmzdrfmcNo ratings yet
- Numerical Simulation of Hyper Velocity Impact On CFRP-HoneycombDocument10 pagesNumerical Simulation of Hyper Velocity Impact On CFRP-HoneycombHilal Kemal SnylmzNo ratings yet
- An Acoustic Emission Characterization ofDocument7 pagesAn Acoustic Emission Characterization ofWojciech SpychalskiNo ratings yet
- Structural Damage Detection in A Truss Bridge Model Using Fuzzy Clustering and Measured FRF Data Reduced by Principal Component ProjectionDocument13 pagesStructural Damage Detection in A Truss Bridge Model Using Fuzzy Clustering and Measured FRF Data Reduced by Principal Component ProjectionMahmoud SamiNo ratings yet
- MFauzanEP-Sholeh Mauludi Taufik IC3E2015 UTHM ARPNDocument8 pagesMFauzanEP-Sholeh Mauludi Taufik IC3E2015 UTHM ARPNAnonymous BW2VsFifi9No ratings yet
- Analysis of A Navigation Antenna Installed On A Civil AirplaneDocument4 pagesAnalysis of A Navigation Antenna Installed On A Civil Airplanefakher hamoucheNo ratings yet
- Higher Frequency Dynamic Response Analysis of The Foam Concrete Block ElementDocument6 pagesHigher Frequency Dynamic Response Analysis of The Foam Concrete Block ElementMarina LatinovićNo ratings yet
- El Motor de TurbinaDocument4 pagesEl Motor de TurbinaJhon Edgar Quisiyupanqui CusiquispeNo ratings yet
- Laser Ultrasonic Inspection of Additive Manufactured ComponentsDocument9 pagesLaser Ultrasonic Inspection of Additive Manufactured ComponentsSree SabariNo ratings yet
- AIAA-2002-1545: 2002 The American Institute of Aeronautics and Astronautics Inc. All Rights ReservedDocument11 pagesAIAA-2002-1545: 2002 The American Institute of Aeronautics and Astronautics Inc. All Rights ReserveddoolyiiNo ratings yet
- ORTHORECTIFY SATELLITE IMAGES USING EXTERNAL DEMSDocument6 pagesORTHORECTIFY SATELLITE IMAGES USING EXTERNAL DEMSNugra PutraNo ratings yet
- Photoelastic Visualisation - Phased Array Sound FieldsDocument13 pagesPhotoelastic Visualisation - Phased Array Sound Fieldsdavood abbasiNo ratings yet
- Topology Optimization and AI-based Design of Power Electronic and Electrical Devices: Principles and MethodsFrom EverandTopology Optimization and AI-based Design of Power Electronic and Electrical Devices: Principles and MethodsNo ratings yet
- A0 Phased-Array PrintDocument1 pageA0 Phased-Array PrintMarciel AmorimNo ratings yet
- Govpub C13Document30 pagesGovpub C13Zoran IlkovNo ratings yet
- Global Mining Review Cover Story October 2022Document3 pagesGlobal Mining Review Cover Story October 2022Marciel AmorimNo ratings yet
- Adhesive Bonding of Aircraft Composite StructuresDocument364 pagesAdhesive Bonding of Aircraft Composite StructuresAbhiNo ratings yet
- Application NoteHow To Better Detect Corrosion in Pipe ElbowsDocument2 pagesApplication NoteHow To Better Detect Corrosion in Pipe ElbowsMarciel AmorimNo ratings yet
- ABENDI & ASME Workshop - CHIP ESKRIDGEDocument116 pagesABENDI & ASME Workshop - CHIP ESKRIDGEMarciel AmorimNo ratings yet
- BHCS33447 Palm Scanner Brochure - R1Document4 pagesBHCS33447 Palm Scanner Brochure - R1Marciel AmorimNo ratings yet
- DANATRONICS TransducersDocument2 pagesDANATRONICS TransducersMarciel AmorimNo ratings yet
- ASME Section V NDE ExpertsDocument114 pagesASME Section V NDE ExpertsMarciel AmorimNo ratings yet
- Dakota Ultrasonics Flaw Detector & Thickness Gauge DFX-7 Series SpecificationsDocument2 pagesDakota Ultrasonics Flaw Detector & Thickness Gauge DFX-7 Series Specificationsjcarlos7411No ratings yet
- ABENDI & ASME Workshop - PAUL DAVISDocument54 pagesABENDI & ASME Workshop - PAUL DAVISMarciel AmorimNo ratings yet
- PW52 - ASME BPVC.I-2019 Rules For Construction of Power BoilersDocument1 pagePW52 - ASME BPVC.I-2019 Rules For Construction of Power BoilersMarciel AmorimNo ratings yet
- BPVC V Interp STND 63 2014 JanDocument4 pagesBPVC V Interp STND 63 2014 JanFahri Risfa ZulfiNo ratings yet
- 10 Questions To Ask When Choosing A Phased Array Probe 170203205027Document1 page10 Questions To Ask When Choosing A Phased Array Probe 170203205027Akram AlhaddadNo ratings yet
- FMTDocument10 pagesFMTMarciel AmorimNo ratings yet
- P 131Document7 pagesP 131Marciel AmorimNo ratings yet
- Ndts Starmans Dio 1000 PaDocument4 pagesNdts Starmans Dio 1000 PaMarciel Amorim0% (1)
- Aws A3.0 PDFDocument147 pagesAws A3.0 PDFMarciel AmorimNo ratings yet
- Gekko: Portable PAUT For NDTDocument2 pagesGekko: Portable PAUT For NDTManuel AvilaNo ratings yet
- Raster Scan Calibration and ScanningDocument48 pagesRaster Scan Calibration and ScanningMarciel AmorimNo ratings yet
- BeamTool 7 User ManualDocument340 pagesBeamTool 7 User ManualMarciel AmorimNo ratings yet
- Characterizing Ultrasonic Search Units and Sound FieldsDocument24 pagesCharacterizing Ultrasonic Search Units and Sound FieldsMarciel AmorimNo ratings yet
- Using The New ISO 19675 Calibration Block For Phased-Array and Conventional Ultrasonic InspectionsDocument23 pagesUsing The New ISO 19675 Calibration Block For Phased-Array and Conventional Ultrasonic InspectionsMarciel AmorimNo ratings yet
- 4000 Essential English Words 2Document195 pages4000 Essential English Words 2Marciel AmorimNo ratings yet
- Aws A5.17 PDFDocument37 pagesAws A5.17 PDFMarciel AmorimNo ratings yet
- ASME Att 4Document39 pagesASME Att 4Marciel AmorimNo ratings yet
- Aws A5.18 PDFDocument40 pagesAws A5.18 PDFMarciel AmorimNo ratings yet
- Duplex Welding GuidelinesDocument13 pagesDuplex Welding GuidelinesadelNo ratings yet
- Ultrasonic Inspection RequirementsDocument18 pagesUltrasonic Inspection RequirementsRaja HoneNo ratings yet
- Advanced Construction TechnologyDocument6 pagesAdvanced Construction TechnologyNik SoniNo ratings yet
- Business PlanDocument49 pagesBusiness Plandanie krisyaNo ratings yet
- Student Assessment GuideDocument72 pagesStudent Assessment GuideDavi MoraesNo ratings yet
- A Systematic Review of Bio-Asphalt For Flexible Pavement ApplicationsDocument16 pagesA Systematic Review of Bio-Asphalt For Flexible Pavement ApplicationsadinaNo ratings yet
- Gazette On Minimum Wages RMG (Bangladesh) - 2018 - (English)Document11 pagesGazette On Minimum Wages RMG (Bangladesh) - 2018 - (English)Mazharul IslamNo ratings yet
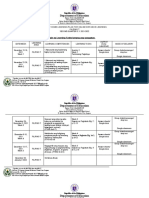
- Department of Education: Republic of The PhilippinesDocument4 pagesDepartment of Education: Republic of The PhilippinesTotoy AbnoyNo ratings yet
- Assessment of Customer Relationship Management On Central Hotel in The Case Hawassa CityDocument41 pagesAssessment of Customer Relationship Management On Central Hotel in The Case Hawassa Cityasu manNo ratings yet
- Condor Technology: Datasheet: Electrical Smart Heater For Space Heating, Model SM - ( ) ADocument2 pagesCondor Technology: Datasheet: Electrical Smart Heater For Space Heating, Model SM - ( ) AEldar IsgenderovNo ratings yet
- Prospectus 2017 - 2018: Admissions OpenDocument36 pagesProspectus 2017 - 2018: Admissions Openmurukuti subbireddyNo ratings yet
- Raspberry Pi Documentation - Remote AccessDocument51 pagesRaspberry Pi Documentation - Remote AccesshelioxNo ratings yet
- 7 Figure Template BookDocument5 pages7 Figure Template Bookmattia89No ratings yet
- Workshop 4 - Customer ServiceDocument8 pagesWorkshop 4 - Customer ServiceSara Nicol SalvadorNo ratings yet
- Iot As A Service: Bo Li Mao Yang Hui Yuan Zhongjiang YanDocument502 pagesIot As A Service: Bo Li Mao Yang Hui Yuan Zhongjiang YanCristina VotoNo ratings yet
- File (SQL Tutorial)Document81 pagesFile (SQL Tutorial)imranbaiggeekNo ratings yet
- AI-Powered Search v14Document398 pagesAI-Powered Search v14NikhilNo ratings yet
- Airframe and SystemsDocument104 pagesAirframe and SystemsVivek Baskar50% (2)
- Standardised Effect Size in Mixed ML ModelsDocument9 pagesStandardised Effect Size in Mixed ML ModelsSergio Enrique Mora MojicaNo ratings yet
- Solarnative BatteryBrick Data-Sheet-V0.3Document3 pagesSolarnative BatteryBrick Data-Sheet-V0.3Pedro fuenmayorNo ratings yet
- Bike TN02 BK 4721 RC Book Honda UnicornDocument1 pageBike TN02 BK 4721 RC Book Honda UnicornvinothNo ratings yet
- Programming Assignment Unit 5 Solution v2Document3 pagesProgramming Assignment Unit 5 Solution v2Everything PromoNo ratings yet
- Excel CheatsheetDocument1 pageExcel CheatsheetBoring BlandNo ratings yet
- IM0973112 Camera AFZ EN A04 MailDocument12 pagesIM0973112 Camera AFZ EN A04 MailEmerson BatistaNo ratings yet
- Chapter 3 - Overview of Manufacturing - UpdateDocument58 pagesChapter 3 - Overview of Manufacturing - Updatethinhtruong17092003No ratings yet
- Solis 10K PDFDocument15 pagesSolis 10K PDFVictor Rios GarciaNo ratings yet
- Cat - IDocument2 pagesCat - IGanesh KumarNo ratings yet
- Article Review 1Document24 pagesArticle Review 1limap5No ratings yet
- Universal Joint Alignment Proc 111606Document5 pagesUniversal Joint Alignment Proc 111606Slobodan GaricNo ratings yet
- Rainvue SeriesDocument50 pagesRainvue Seriesradicall8No ratings yet
- LAB EXERCISE - Module 1 - Welcome To TenableDocument2 pagesLAB EXERCISE - Module 1 - Welcome To Tenablenet flixNo ratings yet
- Astm E1557 09 (2020)Document45 pagesAstm E1557 09 (2020)Patrick LitteeNo ratings yet