You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Install Shematic 3300 APDocument4 pagesInstall Shematic 3300 APthanggimme.phanNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Us 5063337Document7 pagesUs 5063337thanggimme.phanNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- US5250765Document13 pagesUS5250765thanggimme.phanNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Fujitec CP40Document43 pagesFujitec CP40thanggimme.phanNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Fuji Inverter ManualDocument103 pagesFuji Inverter Manualthanggimme.phanNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- US4832158Document24 pagesUS4832158thanggimme.phanNo ratings yet
- Cap Connect PC DB9 FDocument1 pageCap Connect PC DB9 Fthanggimme.phanNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Câ U Hi'nh Thang Ma y MonarchDocument1 pageCâ U Hi'nh Thang Ma y Monarchthanggimme.phanNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Ban Ve Dien Thang Huyndai WC VF (Old Type)Document22 pagesBan Ve Dien Thang Huyndai WC VF (Old Type)thanggimme.phanNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Compact Fans For AC and DC 2016 01 BENDocument272 pagesCompact Fans For AC and DC 2016 01 BENthanggimme.phanNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Drako Lube enDocument11 pagesDrako Lube enthanggimme.phanNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Description of Common Fault Codes For Fujitec CP28 Controller Elevator p2Document3 pagesDescription of Common Fault Codes For Fujitec CP28 Controller Elevator p2thanggimme.phanNo ratings yet
- Drako Fluid SF 10 enDocument11 pagesDrako Fluid SF 10 enthanggimme.phanNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Shanghai Huasheng Fujitec Elevator CP28 User Manual - Document Download p1Document9 pagesShanghai Huasheng Fujitec Elevator CP28 User Manual - Document Download p1thanggimme.phanNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- H94 Run Time of MotorDocument1 pageH94 Run Time of Motorthanggimme.phanNo ratings yet
- ALX2703AAB集成异步门刀MD06A-1 (OCR China Traditional)Document1 pageALX2703AAB集成异步门刀MD06A-1 (OCR China Traditional)thanggimme.phanNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 2000 Series EngDocument3 pages2000 Series Engthanggimme.phanNo ratings yet
- NE555 - Datasheet Timer PDFDocument7 pagesNE555 - Datasheet Timer PDFpancho8gtzNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Lifts, Escalators and Moving Walks Part 5: Escalators and Moving WalksDocument8 pagesLifts, Escalators and Moving Walks Part 5: Escalators and Moving Walksthanggimme.phanNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Data Sheet: HEF4511B MSIDocument11 pagesData Sheet: HEF4511B MSIVasudeva SankaranarayananNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Force JustDocument9 pagesForce Justsuperior001No ratings yet
- Brochure Kone Destination Tcm69 18639Document12 pagesBrochure Kone Destination Tcm69 18639thanggimme.phanNo ratings yet
- Elevator Guide Rails - Frequently Asked QuestionsDocument3 pagesElevator Guide Rails - Frequently Asked Questionsthanggimme.phanNo ratings yet
- ALX2703AAB集成异步门刀MD06A-1 (OCR China Traditional)Document1 pageALX2703AAB集成异步门刀MD06A-1 (OCR China Traditional)thanggimme.phanNo ratings yet
- The Leader in Low-Cost, Remote Monitoring SolutionsDocument5 pagesThe Leader in Low-Cost, Remote Monitoring Solutionsthanggimme.phanNo ratings yet
- Hollow Guide Rail SeriesDocument2 pagesHollow Guide Rail Seriesthanggimme.phanNo ratings yet
- Door Gibs: Size and Number DescriptionDocument1 pageDoor Gibs: Size and Number Descriptionthanggimme.phanNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
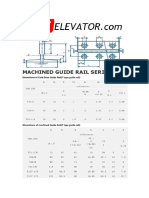
- Machined Guide Rail SeriesDocument2 pagesMachined Guide Rail Seriesthanggimme.phanNo ratings yet
- Otis - Elevator World - Illustration - Final CorrectedDocument1 pageOtis - Elevator World - Illustration - Final CorrectedudbarryNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)