You might also like
- Cuestionario Módulo 5 - Formato de Imágenes. - Revisión Del Intento3Document5 pagesCuestionario Módulo 5 - Formato de Imágenes. - Revisión Del Intento3Daniela Sofía WilsonNo ratings yet
- Inflation Targeting: Lessons from the International ExperienceFrom EverandInflation Targeting: Lessons from the International ExperienceNo ratings yet
- The Chemistry of the Monatomic Gases: Pergamon Texts in Inorganic ChemistryFrom EverandThe Chemistry of the Monatomic Gases: Pergamon Texts in Inorganic ChemistryNo ratings yet
- The International Geophysical Year Meetings: Annals of The International Geophysical Year, Vol. 2From EverandThe International Geophysical Year Meetings: Annals of The International Geophysical Year, Vol. 2M. NicoletNo ratings yet
- Metallurgical Coatings and Thin Films 1991From EverandMetallurgical Coatings and Thin Films 1991G.E. McGuireNo ratings yet
- DinoflagellatesFrom EverandDinoflagellatesDavid L. SpectorNo ratings yet
- Plant Disease: An Advanced Treatise: How Disease Develops in PopulationsFrom EverandPlant Disease: An Advanced Treatise: How Disease Develops in PopulationsJames G. HorsfallNo ratings yet
- Banking Automation: Data Processing Systems and Associated EquipmentFrom EverandBanking Automation: Data Processing Systems and Associated EquipmentNo ratings yet
- Perceptual Modification: Adapting to Altered Sensory EnvironmentsFrom EverandPerceptual Modification: Adapting to Altered Sensory EnvironmentsNo ratings yet
- Controlled FusionFrom EverandControlled FusionJohn KilleenNo ratings yet
- Government Regulations, Pheromone Analysis, Additional Pesticides: Analytical Methods for Pesticides and Plant Growth Regulators, Vol. 8From EverandGovernment Regulations, Pheromone Analysis, Additional Pesticides: Analytical Methods for Pesticides and Plant Growth Regulators, Vol. 8No ratings yet
- Advances in Control Systems: Theory and ApplicationsFrom EverandAdvances in Control Systems: Theory and ApplicationsNo ratings yet
- Dictionary of the Printing and Allied Industries: In English (with definitions), French, German, Dutch, Spanish and ItalianFrom EverandDictionary of the Printing and Allied Industries: In English (with definitions), French, German, Dutch, Spanish and ItalianRating: 1 out of 5 stars1/5 (1)
- Total Environmental Control: The Economics of Cross-Media Pollution TransfersFrom EverandTotal Environmental Control: The Economics of Cross-Media Pollution TransfersNo ratings yet
- The State of the Planet: A Report Prepared for the International Federation of Institutes for Advanced Study (IFIAS), StockholmFrom EverandThe State of the Planet: A Report Prepared for the International Federation of Institutes for Advanced Study (IFIAS), StockholmNo ratings yet
- Adaptive Systems in Control and Signal Processing 1992: Selected Papers from the 4th IFAC Symposium Grenoble, France, 1 - 3 July 1992From EverandAdaptive Systems in Control and Signal Processing 1992: Selected Papers from the 4th IFAC Symposium Grenoble, France, 1 - 3 July 1992No ratings yet
- Plant Pathology V3: The Diseased Population Epidemics and ControlFrom EverandPlant Pathology V3: The Diseased Population Epidemics and ControlJames G. HorsfallNo ratings yet
- Australian Official Publications: Guides to Official PublicationsFrom EverandAustralian Official Publications: Guides to Official PublicationsNo ratings yet
- Geosynthetics in Filtration, Drainage and Erosion ControlFrom EverandGeosynthetics in Filtration, Drainage and Erosion ControlR.M. KoernerNo ratings yet
- Science and Technology for Development: The Role of U.S. UniversitiesFrom EverandScience and Technology for Development: The Role of U.S. UniversitiesNo ratings yet
- The Role of Water in Agriculture: Based on Papers and Discussions at a Symposium Held at the Welsh Plant Breeding Station Near Aberystwyth on March 19th, 1969From EverandThe Role of Water in Agriculture: Based on Papers and Discussions at a Symposium Held at the Welsh Plant Breeding Station Near Aberystwyth on March 19th, 1969No ratings yet
- Operation Intercept: The Multiple Consequences of Public PolicyFrom EverandOperation Intercept: The Multiple Consequences of Public PolicyNo ratings yet
- Medical Electronic Laboratory Equipment 1967-68: Pergamon Electronics Data SeriesFrom EverandMedical Electronic Laboratory Equipment 1967-68: Pergamon Electronics Data SeriesNo ratings yet
- Controlling International Technology Transfer: Issues, Perspectives, and Policy ImplicationsFrom EverandControlling International Technology Transfer: Issues, Perspectives, and Policy ImplicationsNo ratings yet
- New and Updated Methods: Analytical Methods for Pesticides and Plant Growth Regulators, Vol. 10From EverandNew and Updated Methods: Analytical Methods for Pesticides and Plant Growth Regulators, Vol. 10No ratings yet
- The Genesis of New Weapons: Decision Making for Military R & DFrom EverandThe Genesis of New Weapons: Decision Making for Military R & DNo ratings yet
- The Economics of Communication: A Selected Bibliography with AbstractsFrom EverandThe Economics of Communication: A Selected Bibliography with AbstractsNo ratings yet
- High Excitation and Short Pulse PhenomenaFrom EverandHigh Excitation and Short Pulse PhenomenaM.H. PilkuhnNo ratings yet
- Shrub-Steppe: Balance and Change in a Semi-Arid Terrestrial EcosystemFrom EverandShrub-Steppe: Balance and Change in a Semi-Arid Terrestrial EcosystemNo ratings yet
- Agricultural Nonpoint Source Pollution: Model Selection and ApplicationFrom EverandAgricultural Nonpoint Source Pollution: Model Selection and ApplicationNo ratings yet
- Coordination Chemistry: Proceedings of the 21st International Conference on Coordination Chemistry, Toulouse, France, 7-11 July 1980From EverandCoordination Chemistry: Proceedings of the 21st International Conference on Coordination Chemistry, Toulouse, France, 7-11 July 1980J. P. LaurentRating: 1 out of 5 stars1/5 (1)
- The South China Sea: Hydrocarbon Potential and Possibilities of Joint DevelopmentFrom EverandThe South China Sea: Hydrocarbon Potential and Possibilities of Joint DevelopmentNo ratings yet
- Immobilized Enzyme Principles: Applied Biochemistry and Bioengineering, Vol. 1From EverandImmobilized Enzyme Principles: Applied Biochemistry and Bioengineering, Vol. 1No ratings yet
- High-Velocity Impact PhenomenaFrom EverandHigh-Velocity Impact PhenomenaRay KinslowNo ratings yet
- Liquid State VIIIBFrom EverandLiquid State VIIIBDouglas HendersonNo ratings yet
- The Gas Situation in the ECE Region Around the Year 1990: Proceedings of an International Symposium of the Committee on Gas of the Economic Commission for Europe, Held in Evian, France, at the Invitation of the Government of France, 2-5 October 1978From EverandThe Gas Situation in the ECE Region Around the Year 1990: Proceedings of an International Symposium of the Committee on Gas of the Economic Commission for Europe, Held in Evian, France, at the Invitation of the Government of France, 2-5 October 1978No ratings yet
- Crime and Justice in America: Critical Issues for the FutureFrom EverandCrime and Justice in America: Critical Issues for the FutureJohn T. O'BrienNo ratings yet
- Local Plans in British Land Use Planning: Urban and Regional Planning SeriesFrom EverandLocal Plans in British Land Use Planning: Urban and Regional Planning SeriesNo ratings yet
- Land Policy and Urban Growth: Pergamon International Library of Science, Technology, Engineering and Social StudiesFrom EverandLand Policy and Urban Growth: Pergamon International Library of Science, Technology, Engineering and Social StudiesRating: 4 out of 5 stars4/5 (1)
- Posttranslational covalent modifications of proteinsFrom EverandPosttranslational covalent modifications of proteinsB. Connor JohnsonNo ratings yet
- Plant Physiology 6C: A Treatise: Physiology of Development: From Seeds to SexualityFrom EverandPlant Physiology 6C: A Treatise: Physiology of Development: From Seeds to SexualityNo ratings yet
- Bilingual Guide to Business and Professional Correspondence: German-English: Pergamon International Library of Science, Technology, Engineering and Social StudiesFrom EverandBilingual Guide to Business and Professional Correspondence: German-English: Pergamon International Library of Science, Technology, Engineering and Social StudiesNo ratings yet
- Observations of the Night Airglow: 1 July 1957—31 December 1959From EverandObservations of the Night Airglow: 1 July 1957—31 December 1959I. G. YaoNo ratings yet
- XXIVth International Congress of Pure and Applied Chemistry: Plenary and Main Section Lectures Presented at Hamburg, Federal Republic of Germany, 2–8 September 1973From EverandXXIVth International Congress of Pure and Applied Chemistry: Plenary and Main Section Lectures Presented at Hamburg, Federal Republic of Germany, 2–8 September 1973No ratings yet
- Design To CostDocument20 pagesDesign To CostshrikantbagalNo ratings yet
- Automotive Plastics ChainDocument47 pagesAutomotive Plastics ChainshrikantbagalNo ratings yet
- Advances in Vehicle DesignDocument187 pagesAdvances in Vehicle Designsayed92% (13)
- Anodizing Standards and and Quality Control Tests Quality Control Tests of America's AutomakersDocument25 pagesAnodizing Standards and and Quality Control Tests Quality Control Tests of America's AutomakersshrikantbagalNo ratings yet
- Castor Camber KingpinDocument7 pagesCastor Camber KingpingagalixNo ratings yet
- Acqua 100 SemimateDocument3 pagesAcqua 100 Semimaten50% (2)
- TCC OriginalDocument12 pagesTCC OriginalJulia KipperNo ratings yet
- Sesión 9 Practica Calificada Tecnicas de NegociaciónDocument2 pagesSesión 9 Practica Calificada Tecnicas de NegociaciónHarold Edmundo Mateo BaldeonNo ratings yet
- Syracuse VA Respite Care PamphletDocument4 pagesSyracuse VA Respite Care PamphletWatertown Daily TimesNo ratings yet
- List of Core Electricals CompaniesDocument9 pagesList of Core Electricals CompaniesGp MishraNo ratings yet
- Medicina ForenseDocument27 pagesMedicina ForensemeelroosNo ratings yet
- Inquiry Cycle Speech Bubble SignsDocument19 pagesInquiry Cycle Speech Bubble Signsomar issaNo ratings yet
- Practica 7.docx (Viscosidad)Document4 pagesPractica 7.docx (Viscosidad)Josué CalleNo ratings yet
- Diario ReflexivoDocument4 pagesDiario ReflexivoBea MPNo ratings yet
- Teorema de Cauchy - Variable ComplejaDocument6 pagesTeorema de Cauchy - Variable ComplejaLuis GarcíaNo ratings yet
- programaRF2017 30Document41 pagesprogramaRF2017 30YULIANA CAMILA PARRA PARRANo ratings yet
- Sector AgricolasDocument17 pagesSector AgricolasKATHERINNo ratings yet
- Gabarito Apx1 Metodos Estatisticos 1Document8 pagesGabarito Apx1 Metodos Estatisticos 1Dayana LinsNo ratings yet
- Ensayo Etica NicomaqueaDocument6 pagesEnsayo Etica NicomaqueaMiguel Acevedo0% (2)
- Escucha ActivaDocument25 pagesEscucha ActivaPamela Cedeño0% (1)
- Bob Boyce - Inventor's Terminal Cancer Courtesy of Verichip - Targeted IndividualsDocument13 pagesBob Boyce - Inventor's Terminal Cancer Courtesy of Verichip - Targeted IndividualsTortured-Targeted-Individuals100% (2)
- Psalms, Hymns, and Spiritual Songs: The Master Musician's MelodiesDocument4 pagesPsalms, Hymns, and Spiritual Songs: The Master Musician's MelodiesAlexey LevchukNo ratings yet
- Módulo 4 - Lectura 4 TelecomunicacionesDocument7 pagesMódulo 4 - Lectura 4 TelecomunicacionesSGA InformáticaNo ratings yet
- Cap 8 Transporte de Mercancias PeligrosasDocument15 pagesCap 8 Transporte de Mercancias Peligrosasjose augusto segoviaNo ratings yet
- Configuração Daruma - Não Fiscal PDFDocument6 pagesConfiguração Daruma - Não Fiscal PDFandremeiratiNo ratings yet
- S3 - Tda ElementDocument3 pagesS3 - Tda ElementOumeima RACHDINo ratings yet
- Primera Evaluación - Revisión Del Intento VDocument16 pagesPrimera Evaluación - Revisión Del Intento VLesly HerreraNo ratings yet
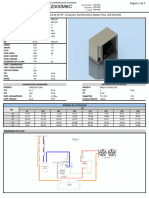
- MBBX2000M6CDocument3 pagesMBBX2000M6CFelipe MartinezNo ratings yet
- 21020528J BMW 5er GT F07 Ab 03 14 Stand 20 12 16Document13 pages21020528J BMW 5er GT F07 Ab 03 14 Stand 20 12 16Florin CiudinNo ratings yet
- Food Processing IntroductionDocument45 pagesFood Processing IntroductionCarrylle Janne Noval100% (1)
- Ejercicios EstequiometriaDocument5 pagesEjercicios EstequiometriaTusaNo ratings yet
- The Mantras BookDocument24 pagesThe Mantras BookMelchidan ndjapouNo ratings yet
- Tarea MaquinariaDocument9 pagesTarea MaquinariaRoger Palala FernándezNo ratings yet
- Álgebra Superior I LascurainDocument171 pagesÁlgebra Superior I LascurainJavier Alejandro Puga Cañedo100% (8)