You might also like
- Final Quiz 1Document3 pagesFinal Quiz 1Erick GarciaNo ratings yet
- The Estimation of Electric Power Losses in Electrical Networks by Fuzzy Regression Model Using Genetic AlgorithmDocument18 pagesThe Estimation of Electric Power Losses in Electrical Networks by Fuzzy Regression Model Using Genetic AlgorithmbogdanNo ratings yet
- Karthik Nambiar 60009220193Document9 pagesKarthik Nambiar 60009220193knambiardjsNo ratings yet
- Lecture 1Document17 pagesLecture 1amjadtawfeq2No ratings yet
- Order Reduction For Large Scale Finite Element Models: A Systems PerspectiveDocument21 pagesOrder Reduction For Large Scale Finite Element Models: A Systems PerspectiveAnonymous lEBdswQXmxNo ratings yet
- Sparse Implementation of Revised Simplex Algorithms On Parallel ComputersDocument8 pagesSparse Implementation of Revised Simplex Algorithms On Parallel ComputersKaram SalehNo ratings yet
- Lab 6Document9 pagesLab 6Muhammad Samay EllahiNo ratings yet
- Pubdoc 3 8192 1565Document9 pagesPubdoc 3 8192 1565MuhammadAbdulRasoolNo ratings yet
- CPSC 540 Assignment 1 (Due January 19)Document9 pagesCPSC 540 Assignment 1 (Due January 19)JohnnyDoe0x27ANo ratings yet
- Linear Models - Numeric PredictionDocument7 pagesLinear Models - Numeric Predictionar9vegaNo ratings yet
- Signal & System: Laboratory ManualDocument24 pagesSignal & System: Laboratory ManualitachiNo ratings yet
- Everything You Need To Know About Linear RegressionDocument19 pagesEverything You Need To Know About Linear RegressionRohit Umbare100% (1)
- Unit IiiDocument27 pagesUnit Iiimahih16237No ratings yet
- LDL FactorizacionDocument7 pagesLDL FactorizacionMiguel PerezNo ratings yet
- Ue21cs352a 20230830120810Document30 pagesUe21cs352a 20230830120810Sonupatel SonupatelNo ratings yet
- Isn't Linear Regression From Statistics?Document4 pagesIsn't Linear Regression From Statistics?umang rajanNo ratings yet
- Linear Regression For BeginnersDocument4 pagesLinear Regression For BeginnersrajatNo ratings yet
- Chapter 3 SummaryDocument8 pagesChapter 3 Summaryimran khanNo ratings yet
- A MatlabSimulink Toolbox For Inversion of Local Linear Model Trees PDFDocument8 pagesA MatlabSimulink Toolbox For Inversion of Local Linear Model Trees PDFAfi LANo ratings yet
- ManualDocument46 pagesManualMAnan NanavatiNo ratings yet
- Applications of Numerical Methods in Civil EngineeringDocument9 pagesApplications of Numerical Methods in Civil EngineeringAsniah M. RatabanNo ratings yet
- Neural Network Simulations in MatlabDocument5 pagesNeural Network Simulations in MatlablrdseekerNo ratings yet
- Math OptimizationDocument11 pagesMath OptimizationAlexander ValverdeNo ratings yet
- Power System State EstimationDocument54 pagesPower System State EstimationKarthik Thirumala100% (4)
- Control Relevant Model Reduction of Volterra Series Models: Wei-Ming Ling and Daniel E. RiveraDocument22 pagesControl Relevant Model Reduction of Volterra Series Models: Wei-Ming Ling and Daniel E. RiveraPallab DasNo ratings yet
- Gharamani PcaDocument8 pagesGharamani PcaLeonardo L. ImpettNo ratings yet
- Cientific Omputing: Fusen LinDocument16 pagesCientific Omputing: Fusen LinDana MckenzieNo ratings yet
- Mathematical Optimization: Keywords and Notation KeyDocument62 pagesMathematical Optimization: Keywords and Notation KeyM Khahfi ZuhandaNo ratings yet
- BréhierEtal 2016Document43 pagesBréhierEtal 2016ossama123456No ratings yet
- Translate - Varying Coefficient Models in Stata - v4Document40 pagesTranslate - Varying Coefficient Models in Stata - v4Arq. AcadêmicoNo ratings yet
- Report 1610Document9 pagesReport 1610rex_fred92No ratings yet
- AI Lec5Document42 pagesAI Lec5Asil Zulfiqar 4459-FBAS/BSCS4/F21No ratings yet
- A Computational Comparison of Two Different Approaches To Solve The Multi-Area Optimal Power FlowDocument4 pagesA Computational Comparison of Two Different Approaches To Solve The Multi-Area Optimal Power FlowFlores JesusNo ratings yet
- Reddy Chap3-4Document68 pagesReddy Chap3-4Juan CarlosNo ratings yet
- Simultaneous Modular Approach: I1 I2 in IDocument9 pagesSimultaneous Modular Approach: I1 I2 in IVikas MishraNo ratings yet
- Matemath For Data ScienceDocument10 pagesMatemath For Data ScienceSuryanNo ratings yet
- Different Simplex MethodsDocument7 pagesDifferent Simplex MethodsdaselknamNo ratings yet
- Radial Basis Function Networks: Yousef AkhlaghiDocument28 pagesRadial Basis Function Networks: Yousef Akhlaghimoh_750571194No ratings yet
- Matrix Inference in Fuzzy Decision Trees: Eusflat - Lfa 2005Document6 pagesMatrix Inference in Fuzzy Decision Trees: Eusflat - Lfa 2005tulkas72No ratings yet
- Statistical Computing in Matlab: AMS 597 Ling LengDocument23 pagesStatistical Computing in Matlab: AMS 597 Ling LengRenatus KatunduNo ratings yet
- Passivity-Based Sample Selection and Adaptive Vector Fitting Algorithm For Pole-Residue Modeling of Sparse Frequency-Domain DataDocument6 pagesPassivity-Based Sample Selection and Adaptive Vector Fitting Algorithm For Pole-Residue Modeling of Sparse Frequency-Domain DataPramod SrinivasanNo ratings yet
- Data Augmentation For Support Vector Machines: Mallick Et Al. 2005 George and Mcculloch 1993 1997 Ishwaran and Rao 2005Document24 pagesData Augmentation For Support Vector Machines: Mallick Et Al. 2005 George and Mcculloch 1993 1997 Ishwaran and Rao 2005EZ112No ratings yet
- An Introduction To Matrix Structural Analysis and Finite Element MethodsDocument8 pagesAn Introduction To Matrix Structural Analysis and Finite Element MethodsAziz AljurfNo ratings yet
- Linear RegressionDocument4 pagesLinear RegressionHemant GargNo ratings yet
- Matlab For Microeconometrics: Numerical Optimization: Nick Kuminoff Virginia Tech: Fall 2008Document16 pagesMatlab For Microeconometrics: Numerical Optimization: Nick Kuminoff Virginia Tech: Fall 2008mjdjarNo ratings yet
- Regularization Networks and Support Vector MachinesDocument53 pagesRegularization Networks and Support Vector MachinesansmechitNo ratings yet
- Modern Model Order Reduction For Industrial ApplicationsDocument6 pagesModern Model Order Reduction For Industrial ApplicationsAnonymous lEBdswQXmxNo ratings yet
- Order of Residual Generators - Bounds and Algorithms Erik FriskDocument6 pagesOrder of Residual Generators - Bounds and Algorithms Erik FriskNeo SebicoNo ratings yet
- Ge 501 NotesDocument34 pagesGe 501 NoteshuthNo ratings yet
- Streaming Algorithms For Data in MotionDocument11 pagesStreaming Algorithms For Data in MotionLiel BudilovskyNo ratings yet
- Probabilistic Feature Selection and Classification Vector MachineDocument27 pagesProbabilistic Feature Selection and Classification Vector Machinenandini bubNo ratings yet
- Power Flow Analysis Software Using MatlabDocument26 pagesPower Flow Analysis Software Using MatlabMostafa Amer100% (4)
- IR Tools - A MATLAB Package of Iterative Regularization Methods and Large-Scale Test ProblemsDocument36 pagesIR Tools - A MATLAB Package of Iterative Regularization Methods and Large-Scale Test ProblemsNavdeep GoelNo ratings yet
- Efficient Parallel Non-Negative Least Squares On Multi-Core ArchitecturesDocument16 pagesEfficient Parallel Non-Negative Least Squares On Multi-Core ArchitecturesJason StanleyNo ratings yet
- Higham Siam Sde ReviewDocument22 pagesHigham Siam Sde ReviewAlex ChenNo ratings yet
- A Genetic Algorithm For Solving The Optimal Power Flow ProblemDocument15 pagesA Genetic Algorithm For Solving The Optimal Power Flow Problemnirmal_inboxNo ratings yet
- Approaches To Low-Power Implementations of DSP SystemsDocument22 pagesApproaches To Low-Power Implementations of DSP SystemsHarish KumarNo ratings yet
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsFrom EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsNo ratings yet
- qt0m1531bp NosplashDocument2 pagesqt0m1531bp NosplashchufamoashenafiNo ratings yet
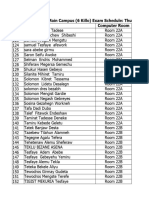
- Thursday June 8, 2023 Morning Sidist Killo Main CampusDocument6 pagesThursday June 8, 2023 Morning Sidist Killo Main CampuschufamoashenafiNo ratings yet
- Ch-0 Introduction To Machine LearningDocument45 pagesCh-0 Introduction To Machine LearningchufamoashenafiNo ratings yet
- Study Paper AI and Big Data For TelecomDocument17 pagesStudy Paper AI and Big Data For TelecomchufamoashenafiNo ratings yet
- KMK 2023Document5 pagesKMK 2023Ainnur NatasyaNo ratings yet
- Tutr DX AMODocument14 pagesTutr DX AMOPetco AndreiNo ratings yet
- J Ipm 2019 102121Document17 pagesJ Ipm 2019 102121bilalNo ratings yet
- AA SL IB2 Calculus 1 File Tutoring PDFDocument8 pagesAA SL IB2 Calculus 1 File Tutoring PDFchelsNo ratings yet
- Encryption Using Lester Hill Cipher Algorithm: Thangarasu.N DR - Arul Lawrence SelvakumarDocument5 pagesEncryption Using Lester Hill Cipher Algorithm: Thangarasu.N DR - Arul Lawrence SelvakumarEhsan GhasisinNo ratings yet
- Web Content Outlier MiningDocument21 pagesWeb Content Outlier MiningBcool AndhappyNo ratings yet
- J-HXfer Meshless ConjugateDocument13 pagesJ-HXfer Meshless Conjugatebardock277No ratings yet
- 63 General Probability RulesDocument39 pages63 General Probability RulesJoy KathleenNo ratings yet
- Comandos Usados en MLDocument17 pagesComandos Usados en MLJohn DannyNo ratings yet
- Lecture 2 Computational Methods For EngineersDocument14 pagesLecture 2 Computational Methods For EngineersJan Michael BatiloNo ratings yet
- Mcs-031: Design and Analysis of Algorithm: Downloaded FromDocument2 pagesMcs-031: Design and Analysis of Algorithm: Downloaded Fromsonia madhwalNo ratings yet
- Sprctra FinalsDocument21 pagesSprctra Finalsanembam putobungbong100% (1)
- G7 Error Analysis Multi-Step EquationsDocument10 pagesG7 Error Analysis Multi-Step EquationsJulie BurkeNo ratings yet
- Key Management and DistributionDocument6 pagesKey Management and Distributiongraduation projectNo ratings yet
- An Short and Simple Intro To Index NotationDocument2 pagesAn Short and Simple Intro To Index NotationYasir LoneNo ratings yet
- NLP PG Syllabus 2023Document3 pagesNLP PG Syllabus 2023rjoshittaNo ratings yet
- Complex Engineering Problem of Thermodynamics 2Document20 pagesComplex Engineering Problem of Thermodynamics 2Shahabuddin Khan NiaziNo ratings yet
- Non-Equilibrium Statistical Mechanics: Partition Functions and Steepest Entropy IncreaseDocument13 pagesNon-Equilibrium Statistical Mechanics: Partition Functions and Steepest Entropy IncreaseSergio VelascoNo ratings yet
- Homework 1: This Is Problem 9.2 in Mor Harchol-Balter's BookDocument3 pagesHomework 1: This Is Problem 9.2 in Mor Harchol-Balter's BookParas BodkeNo ratings yet
- Mca Project - SynopsisDocument11 pagesMca Project - Synopsisruksana khatoonNo ratings yet
- Lect Topic3 Search Sem1 0910Document33 pagesLect Topic3 Search Sem1 0910Na2ryNo ratings yet
- Partial Differential Equations-IDocument33 pagesPartial Differential Equations-IAnkit ChatterjeeNo ratings yet
- 02 Maximal Output Admissible Set - Linear Systems With State and Control ConstraintsDocument13 pages02 Maximal Output Admissible Set - Linear Systems With State and Control ConstraintsArash MarashianNo ratings yet
- Case of Parathe Wala V2.3Document5 pagesCase of Parathe Wala V2.3sourav singhNo ratings yet
- Creating and Training Custom Layers in TensorFlow 2 - by Arjun Sarkar - Towards Data ScienceDocument11 pagesCreating and Training Custom Layers in TensorFlow 2 - by Arjun Sarkar - Towards Data Sciencearka20032003No ratings yet
- 9th Maths Chap 56Document2 pages9th Maths Chap 56Rana Hassan TariqNo ratings yet
- S FinsolDocument3 pagesS FinsolSachin MichuNo ratings yet
- Chapter - Iii Linear Algebraic Equations: X X X XDocument13 pagesChapter - Iii Linear Algebraic Equations: X X X XTesfayeNo ratings yet
- MIT6 003F11 hw04 PDFDocument14 pagesMIT6 003F11 hw04 PDFSudheer KumarNo ratings yet