You might also like
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- 17 - An Introduction To RTKLIBDocument30 pages17 - An Introduction To RTKLIBAlessandro PereiraNo ratings yet
- U Bootdoc PDFDocument13 pagesU Bootdoc PDFDineshkumarparamesNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- RPD Deploy 11g To 12cDocument3 pagesRPD Deploy 11g To 12cSairam YannamNo ratings yet
- U Boot AbcdgeDocument232 pagesU Boot AbcdgeDineshkumarparamesNo ratings yet
- Dreamcast Architecture: Architecture of Consoles: A Practical Analysis, #9From EverandDreamcast Architecture: Architecture of Consoles: A Practical Analysis, #9No ratings yet
- msp430 MSPGCC Eclipse Ubuntu TutorialDocument15 pagesmsp430 MSPGCC Eclipse Ubuntu TutorialPeter Šamperl89% (9)
- 1-System Upgrade To GN4 VersionDocument6 pages1-System Upgrade To GN4 VersionalfonzitoNo ratings yet
- OM90 NotesDocument2 pagesOM90 NotesKunto Adi NugrohoNo ratings yet
- The Universal Boot Loader ("Das U Boot") : Table of ContentsDocument13 pagesThe Universal Boot Loader ("Das U Boot") : Table of ContentsRamesh Ramasamy100% (2)
- Debugging The Linux Kernel With GDBDocument40 pagesDebugging The Linux Kernel With GDBtedy58No ratings yet
- Digital Slide Show Procedure-004Document5 pagesDigital Slide Show Procedure-004Brian MillsNo ratings yet
- DULG CanyonlandsDocument230 pagesDULG CanyonlandstarewNo ratings yet
- Clone Pull Push CmdsDocument6 pagesClone Pull Push CmdsrajeshkriNo ratings yet
- Coding Standars For Proc & JCLDocument5 pagesCoding Standars For Proc & JCLsati1987No ratings yet
- Crash Dump Analysis: System Debugging in LinuxDocument12 pagesCrash Dump Analysis: System Debugging in Linuxachilles7No ratings yet
- Computer Architecture Project 2: Understanding Gem5 Branch Predictor StructureDocument5 pagesComputer Architecture Project 2: Understanding Gem5 Branch Predictor StructureAsif MalikNo ratings yet
- Lisa2016bpftools169 161209002318Document68 pagesLisa2016bpftools169 161209002318csy365No ratings yet
- Installation and ConfiguratioDocument16 pagesInstallation and ConfiguratioJavier Gallego CarrascoNo ratings yet
- READMEDocument2 pagesREADMEiNo ratings yet
- Cantv Ecs Mod H61H2-Cm Dualcore G620, 2Gb Ram WDC - Wd5000Aakx, 500Gb Aa1: Aoa150 (Zg5), 1G Ram Dualcore Atom N270, 1.6Ghz, Hitachi HD 160G Aa1Document1 pageCantv Ecs Mod H61H2-Cm Dualcore G620, 2Gb Ram WDC - Wd5000Aakx, 500Gb Aa1: Aoa150 (Zg5), 1G Ram Dualcore Atom N270, 1.6Ghz, Hitachi HD 160G Aa1Richard HoltNo ratings yet
- Global Mapper HelpDocument153 pagesGlobal Mapper HelpMarco Emanuel PenciNo ratings yet
- Crash Dump AnalysisDocument12 pagesCrash Dump AnalysisGobara DhanNo ratings yet
- Tip 5g Iot Openwrt 2Document39 pagesTip 5g Iot Openwrt 2mengyuNo ratings yet
- Install and Configure GNS3 With TunTap On The MacDocument9 pagesInstall and Configure GNS3 With TunTap On The MacVeer Bahadur SinghNo ratings yet
- Release Notes STS 2100 - EDocument5 pagesRelease Notes STS 2100 - EВячеслав ГлушакNo ratings yet
- Global Mapper HelpDocument345 pagesGlobal Mapper HelpTesfaye TeferaNo ratings yet
- Hellcat Pilot InstructionsDocument22 pagesHellcat Pilot InstructionsRefugio Hernandez ArceNo ratings yet
- p2p RPLDocument146 pagesp2p RPLDanilo AleksandrovNo ratings yet
- CentOS 7 InstallationDocument6 pagesCentOS 7 InstallationShivaraj P PNo ratings yet
- Docker Kontejnery V Praxi SlidesDocument17 pagesDocker Kontejnery V Praxi SlidesVel_stNo ratings yet
- GM8180 Software Training CourseDocument31 pagesGM8180 Software Training Coursesensor_versionNo ratings yet
- Pgpool-II For BeginnersDocument12 pagesPgpool-II For BeginnersVinicius SchmidtNo ratings yet
- GNS3 NotesDocument16 pagesGNS3 NotesJohn NguyenNo ratings yet
- Global Mapper HelpDocument287 pagesGlobal Mapper HelpIoana RoxanaNo ratings yet
- Making Maps and Plotting Data With GMT and iGMT: Thorsten BeckerDocument25 pagesMaking Maps and Plotting Data With GMT and iGMT: Thorsten BeckerWiguna KurniawanNo ratings yet
- InstructionsDocument2 pagesInstructionsJack Van JhonesNo ratings yet
- 6LowPAN PresentationDocument33 pages6LowPAN PresentationalshabotiNo ratings yet
- Installation LogDocument5 pagesInstallation LogUnLoveableFork ForkclanleaderNo ratings yet
- Lecture 9: GMT: Asst. Prof. Deepa Mele VeeduDocument64 pagesLecture 9: GMT: Asst. Prof. Deepa Mele VeeduMidhun MNo ratings yet
- Inject Routes With Multiple Next-Hops in JunosDocument8 pagesInject Routes With Multiple Next-Hops in Junoscristian7epnNo ratings yet
- 11i Cloning Using Rapid Clone - RAHULDocument27 pages11i Cloning Using Rapid Clone - RAHULRahul Gupta100% (4)
- Pgrouting Manual: Release 2.0.0Document94 pagesPgrouting Manual: Release 2.0.0Raluca CazanescuNo ratings yet
- Network Boot Operating Systems With gPXEDocument5 pagesNetwork Boot Operating Systems With gPXEbobbysmith78No ratings yet
- Langkah Instalasi DB Grid Cluster v.1.0 - GreenplumDocument9 pagesLangkah Instalasi DB Grid Cluster v.1.0 - GreenplumWisnuNo ratings yet
- WINGRIDDS v5.13 Release NotesDocument13 pagesWINGRIDDS v5.13 Release NotesdardNo ratings yet
- Installation LogDocument6 pagesInstallation LogOmaneNo ratings yet
- Basic Installation OdroidC2 V1.1Document20 pagesBasic Installation OdroidC2 V1.1Mani Kandan KNo ratings yet
- Installation Snort 3: # SudoDocument8 pagesInstallation Snort 3: # SudoAzzedine AzzedineNo ratings yet
- Debugging Guide For GDB and Eclipse: This Document Guides The User ThroughDocument12 pagesDebugging Guide For GDB and Eclipse: This Document Guides The User ThroughGamindu UdayangaNo ratings yet
- Install DRDocument65 pagesInstall DRdantas.arnaldoNo ratings yet
- Pengolahan Citra RADARDocument26 pagesPengolahan Citra RADARsiroNo ratings yet
- Overview CompilingDocument50 pagesOverview CompilingperlarmoraleNo ratings yet
- Bernese GNSS Software: Processing Examples in Version 5.2Document43 pagesBernese GNSS Software: Processing Examples in Version 5.2Mohamed HamedNo ratings yet
- Global MapperDocument325 pagesGlobal MapperJaime Edwin SardonNo ratings yet
- Open Vswitch With DPDK : Hands-On LabDocument17 pagesOpen Vswitch With DPDK : Hands-On LabHans MaiserNo ratings yet
- GNU Grub 2 ManualDocument137 pagesGNU Grub 2 ManualJano KerekesNo ratings yet
- SARI概述Document9 pagesSARI概述wn1529.20000No ratings yet
- On Analysis of LitPOS Stations TimeDocument5 pagesOn Analysis of LitPOS Stations Timewn1529.20000No ratings yet
- Xu Open-Source MATLAB GPSDocument21 pagesXu Open-Source MATLAB GPSwn1529.20000No ratings yet
- 长基线RTK实验Document13 pages长基线RTK实验wn1529.20000No ratings yet
- GNSS Receiver Zero Baseline Test Using GPS SignalDocument11 pagesGNSS Receiver Zero Baseline Test Using GPS Signalwn1529.20000No ratings yet
- Material Safety Data Sheet: 1 Chemical Product and Company Identification FENOL LFR (6015-6020-6025-6035)Document5 pagesMaterial Safety Data Sheet: 1 Chemical Product and Company Identification FENOL LFR (6015-6020-6025-6035)Zirve PolimerNo ratings yet
- Defect Analysis and Prevention For Software Process Quality ImprovementDocument6 pagesDefect Analysis and Prevention For Software Process Quality ImprovementSrinivas Rg KNo ratings yet
- A6013L Capacitor Meter Tester PDFDocument2 pagesA6013L Capacitor Meter Tester PDFCarlos IrigoinNo ratings yet
- gpg14 PortableDocument79 pagesgpg14 PortableRobin ChenNo ratings yet
- ISUZU Vehicle XM Spec 4JB1TDocument4 pagesISUZU Vehicle XM Spec 4JB1TKevin Sevilla100% (1)
- Packaged CCE Software Compatibility Matrix For 11.5 (X)Document14 pagesPackaged CCE Software Compatibility Matrix For 11.5 (X)eduardo perezNo ratings yet
- Field Density TestDocument12 pagesField Density TestRoyNo ratings yet
- Compiled Sample Problems From The Book of de Leon Art 1305 1379Document6 pagesCompiled Sample Problems From The Book of de Leon Art 1305 1379Amielle CanilloNo ratings yet
- Service Manual VideoJet 1210, 1220 и 1510Document380 pagesService Manual VideoJet 1210, 1220 и 1510yemoleg88No ratings yet
- Unit I CoaDocument59 pagesUnit I CoaRajitha ReddyNo ratings yet
- CWTSDocument2 pagesCWTSShakira Isabel ArtuzNo ratings yet
- Issues in Economics TodayDocument559 pagesIssues in Economics TodayNikhil Singhal71% (7)
- AA Bot Insight v2.1 User GuideDocument63 pagesAA Bot Insight v2.1 User GuideAmitesh PandeyNo ratings yet
- SS 551-2009 - PreviewDocument12 pagesSS 551-2009 - PreviewRichard LeongNo ratings yet
- Primer Size and Bullet Diameter Chart: 4050 S. Clark, Mexico, MO 65265Document3 pagesPrimer Size and Bullet Diameter Chart: 4050 S. Clark, Mexico, MO 65265lyndondrNo ratings yet
- Ford Focus PCMDocument58 pagesFord Focus PCMEl OhmimetroNo ratings yet
- Studentzone 02 2017Document3 pagesStudentzone 02 2017YahiaEl-obidyNo ratings yet
- ZF 6HP21 ZF 6HP21X 6 SPEED RWD (Full Electronic Control) : BMW Code 1071 030 XXX BMW Code 1071 050 XXXDocument6 pagesZF 6HP21 ZF 6HP21X 6 SPEED RWD (Full Electronic Control) : BMW Code 1071 030 XXX BMW Code 1071 050 XXXToks Vilmantas100% (1)
- Gayatri SwaminathanDocument1 pageGayatri Swaminathanbhuvana raghavanNo ratings yet
- Deloitte Property Index 2021Document26 pagesDeloitte Property Index 2021claus_44No ratings yet
- DLL G6 Q3 WEEK 1 (Mam Inkay Peralta)Document53 pagesDLL G6 Q3 WEEK 1 (Mam Inkay Peralta)She Mark Ghelbert Salonga100% (1)
- M.tech Structural Engineering Syllabus 2nd SemesterDocument5 pagesM.tech Structural Engineering Syllabus 2nd SemesterPriyankaNo ratings yet
- BPW Brake Cylinders: For Disc and Drum Brake AxlesDocument14 pagesBPW Brake Cylinders: For Disc and Drum Brake AxlesSteven FryeNo ratings yet
- SPCO 2007 PPTDocument9 pagesSPCO 2007 PPTBerhanu Zemecha HabteNo ratings yet
- ASSESSMENT IN LEARNING 2 MODULE (Finals) With POSTTESTDocument63 pagesASSESSMENT IN LEARNING 2 MODULE (Finals) With POSTTESTcreqyaqaNo ratings yet
- MetallicaDocument2 pagesMetallicarubinsonNo ratings yet
- MOTIVATION Reyes & CuestaDocument2 pagesMOTIVATION Reyes & CuestaLoiweza AbagaNo ratings yet
- Railway Ticketing DocumentationDocument243 pagesRailway Ticketing Documentationsakthipet1100% (1)
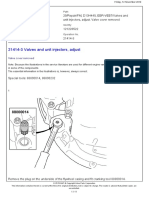
- 21414-3 Valves and Unit Injectors, AdjustDocument11 pages21414-3 Valves and Unit Injectors, AdjustTeguh Imam Adri100% (1)
- The Future of Private Equity - MCK 2009Document6 pagesThe Future of Private Equity - MCK 2009apritul3539No ratings yet