You might also like
- 737 Performance Reference Handbook - EASA EditionFrom Everand737 Performance Reference Handbook - EASA EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Beech 1900 Basic ProceduresDocument6 pagesBeech 1900 Basic ProceduresAlëxândër KošëNo ratings yet
- Operation Manual For The Cessna 120 and 140Document52 pagesOperation Manual For The Cessna 120 and 140Mike100% (2)
- Wind Trade 737Document5 pagesWind Trade 737Shama Saeed100% (1)
- The Flight Operations Page: Airbus A300B4-203 ProceduresDocument18 pagesThe Flight Operations Page: Airbus A300B4-203 ProceduresmishanbgdNo ratings yet
- b17 ManualDocument33 pagesb17 ManualCristian Calvillo100% (2)
- 757-767 Study Guide PDFDocument144 pages757-767 Study Guide PDFalvaro2005100% (1)
- Boeing 737-800 Manual For Flight Simulator X: Before Flight Set UpDocument16 pagesBoeing 737-800 Manual For Flight Simulator X: Before Flight Set UpmeryamrezaNo ratings yet
- Flying the C210: Climb Performance TipsDocument5 pagesFlying the C210: Climb Performance TipsLucas KnightNo ratings yet
- Pitts Model 12 POHDocument21 pagesPitts Model 12 POHKyle TiessenNo ratings yet
- Aircraft Weight and Balance Handbook: FAA-H-8083-1AFrom EverandAircraft Weight and Balance Handbook: FAA-H-8083-1ARating: 5 out of 5 stars5/5 (1)
- BARACARBDocument2 pagesBARACARBYudha Satria50% (2)
- Survival Analysis Tutorial on Mammary Carcinogenesis RiskDocument4 pagesSurvival Analysis Tutorial on Mammary Carcinogenesis Riskthermopolis3012100% (1)
- Fly Jet MD-90: Guide to Flying the McDonnell Douglas TwinjetDocument10 pagesFly Jet MD-90: Guide to Flying the McDonnell Douglas TwinjetCharles SingerNo ratings yet
- Autopilot Functional ExamplesDocument26 pagesAutopilot Functional ExamplesEnrique TorresNo ratings yet
- Boeing 737-800 Flight NotesDocument3 pagesBoeing 737-800 Flight NotesAnish Shakya100% (1)
- Instrument Flying: Attitude Plus Power Equals PerformanceDocument12 pagesInstrument Flying: Attitude Plus Power Equals Performancemrtunay2736No ratings yet
- 20 simple steps to get your flying wing "flying goodDocument4 pages20 simple steps to get your flying wing "flying goodfayazmd83No ratings yet
- GRT Autopilot Post-Installation CheckoutDocument9 pagesGRT Autopilot Post-Installation CheckoutmuttusNo ratings yet
- Propeller Control Tutorial v3Document3 pagesPropeller Control Tutorial v3Gibson MwasiNo ratings yet
- 747PROCEDURESDocument15 pages747PROCEDURESericvolmerNo ratings yet
- B777 Memory Items and Limitations: 1. Cabin AltitudeDocument6 pagesB777 Memory Items and Limitations: 1. Cabin AltitudeManuel HervasNo ratings yet
- How To... Fly The Boeing 737 - The Basics: by Kris Heslop (21 July 2005) AssumptionsDocument10 pagesHow To... Fly The Boeing 737 - The Basics: by Kris Heslop (21 July 2005) AssumptionspacoNo ratings yet
- Optimum Altitude: Headwind Rules of ThumbDocument5 pagesOptimum Altitude: Headwind Rules of ThumbDarshan452No ratings yet
- Flying GuideDocument26 pagesFlying GuideAviasoft IndoNo ratings yet
- Aircraft MedresDocument18 pagesAircraft MedresSherif RiadNo ratings yet
- B777 Non-Normal Procedures Quick ReferenceDocument15 pagesB777 Non-Normal Procedures Quick ReferenceAndrew100% (1)
- Flying Lessons Flying Lessons: This Week's LessonsDocument6 pagesFlying Lessons Flying Lessons: This Week's Lessonsjbert55No ratings yet
- 734 PocedureDocument16 pages734 Pocedureeak_ya5875100% (1)
- 5 Tutorial Flight 2 - Autopilot and Flight DirectorDocument36 pages5 Tutorial Flight 2 - Autopilot and Flight DirectorCarlos Henrique Peroni JuniorNo ratings yet
- 5 Tutorial Flight 3 - Radar Anti Ice EGPWSDocument45 pages5 Tutorial Flight 3 - Radar Anti Ice EGPWSCarlos Henrique Peroni JuniorNo ratings yet
- B777 Procedures and Techniques: Rolling TakeoffDocument8 pagesB777 Procedures and Techniques: Rolling TakeoffAbang FayyadNo ratings yet
- 10 Flight Techniques 737 678900 V14Document14 pages10 Flight Techniques 737 678900 V14JavierNo ratings yet
- RCGF Engine Operations ManualDocument8 pagesRCGF Engine Operations ManualricalvarengaNo ratings yet
- RCGF Engine Operations ManualDocument8 pagesRCGF Engine Operations ManualTarso BrasilNo ratings yet
- Beechcraft Baron 58Document11 pagesBeechcraft Baron 58prot291No ratings yet
- Flying The Basler BT-67 in FSXDocument25 pagesFlying The Basler BT-67 in FSXMurdock The A-TeamNo ratings yet
- Cessna Skyhawk 172SP Flight Notes: Required Runway LengthDocument2 pagesCessna Skyhawk 172SP Flight Notes: Required Runway LengthDallynPillayNo ratings yet
- H500D Realism Enhancement Mod ManualDocument6 pagesH500D Realism Enhancement Mod ManualElizabeth HernandezNo ratings yet
- Operation Manual For Cessna 120 140Document52 pagesOperation Manual For Cessna 120 140Sidney Gianini JuniorNo ratings yet
- B737 Use of Take Off ChartsDocument11 pagesB737 Use of Take Off ChartsmohammedredhadjoudiNo ratings yet
- War Thunder Engine Motor DriversDocument9 pagesWar Thunder Engine Motor DriversDEPL0Y JadNo ratings yet
- 210 Gen InfoDocument13 pages210 Gen InfoShaun ReganNo ratings yet
- Accident Prevention Program: Part I-Engine Operation For PilotsDocument7 pagesAccident Prevention Program: Part I-Engine Operation For Pilotssergio leivaNo ratings yet
- Airbus A321 Flight Notes PDFDocument4 pagesAirbus A321 Flight Notes PDFLester AguadaNo ratings yet
- Boeing 777 Memory ItmesDocument6 pagesBoeing 777 Memory ItmesChristian NoldenNo ratings yet
- AirlandFS Manual 1.3Document29 pagesAirlandFS Manual 1.3FreddimeyerNo ratings yet
- Performance ComputationsDocument6 pagesPerformance ComputationsJuly TadeNo ratings yet
- MOTORFALKE SF25B FLIGHT MANUAL TRANSLATIONDocument26 pagesMOTORFALKE SF25B FLIGHT MANUAL TRANSLATIONDanielC SpiesNo ratings yet
- B737-Rejected Takeoff Rev 03Document7 pagesB737-Rejected Takeoff Rev 03blackwing767No ratings yet
- H 1 T P A: Andling Ense Eaflet WIN Iston EroplanesDocument8 pagesH 1 T P A: Andling Ense Eaflet WIN Iston Eroplanesroyalairmaroc737No ratings yet
- Wilco Airbus 380 FAQDocument6 pagesWilco Airbus 380 FAQFernandoNo ratings yet
- NAA ADT 2 Introduction Rev 1Document8 pagesNAA ADT 2 Introduction Rev 1Sergio VolpiNo ratings yet
- Felis 747 IntroductionDocument18 pagesFelis 747 Introductiontheo15 collecNo ratings yet
- AR Assistant: User ManualDocument6 pagesAR Assistant: User ManualConstantinos PervolarakisNo ratings yet
- Fokker Tutorial LOWI-EDDHDocument20 pagesFokker Tutorial LOWI-EDDHAntonio Ahijado MendietaNo ratings yet
- Airbus Boot CampDocument4 pagesAirbus Boot Campaadeshk787No ratings yet
- Mooney Flight Manual N9351MDocument7 pagesMooney Flight Manual N9351MhmylerNo ratings yet
- 416 Takeoff ScenarioDocument7 pages416 Takeoff ScenarioCameronNo ratings yet
- Cessna 152 Reading ComprehensionDocument22 pagesCessna 152 Reading ComprehensionDickter Alberto Zarpan VasquezNo ratings yet
- Learn to Drive: Everything New Drivers Need to KnowFrom EverandLearn to Drive: Everything New Drivers Need to KnowRating: 4 out of 5 stars4/5 (1)
- Oxford SuprEsser ManualDocument34 pagesOxford SuprEsser ManualaaaNo ratings yet
- AstigmatismDocument1 pageAstigmatismAmmellya PutriNo ratings yet
- White Lies - Core RulebookDocument136 pagesWhite Lies - Core RulebookThiago AlmeidaNo ratings yet
- Journal of The Folk Song Society No.8Document82 pagesJournal of The Folk Song Society No.8jackmcfrenzieNo ratings yet
- Separation and Purification TechnologyDocument10 pagesSeparation and Purification TechnologyPedro Henrique MagachoNo ratings yet
- Roland Berger Hot Trends InconstructionDocument24 pagesRoland Berger Hot Trends InconstructionJavier ContrerasNo ratings yet
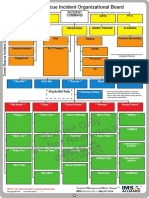
- Sample Only Do Not Reproduce: Trench Rescue Incident Organizational BoardDocument1 pageSample Only Do Not Reproduce: Trench Rescue Incident Organizational BoardLuis Diaz CerdanNo ratings yet
- Packaging Materials and Handling Technique: Dr. Ranjeet SinghDocument48 pagesPackaging Materials and Handling Technique: Dr. Ranjeet Singharon demagiba100% (1)
- High Pressure Processing For Preservation of FoodsDocument36 pagesHigh Pressure Processing For Preservation of FoodsPravin Zine PatilNo ratings yet
- Bandari 2015 Exact SER Expressions of GFDM in Nakagami-M and Rician Fading ChannelsDocument6 pagesBandari 2015 Exact SER Expressions of GFDM in Nakagami-M and Rician Fading Channelssameer khan100% (1)
- Urban Ecology: Concept of Ecology and Its Importance in ArchitectureDocument12 pagesUrban Ecology: Concept of Ecology and Its Importance in ArchitectureNamrata JitendraNo ratings yet
- Understanding and Quantifying Mountain TourismDocument84 pagesUnderstanding and Quantifying Mountain TourismfloridNo ratings yet
- Biomass and Bioenergy: Z.N. Akhlisah, R. Yunus, Z.Z. Abidin, B.Y. Lim, D. KaniaDocument20 pagesBiomass and Bioenergy: Z.N. Akhlisah, R. Yunus, Z.Z. Abidin, B.Y. Lim, D. KaniaPutri sinagaNo ratings yet
- Captured Ammunition Bulletin No 1Document34 pagesCaptured Ammunition Bulletin No 1roberto porto100% (1)
- Figure of SpeechDocument27 pagesFigure of SpeechSabel Ross CaliliwNo ratings yet
- 3 Soal Ganjil Inggris MaritimDocument8 pages3 Soal Ganjil Inggris MaritimFikri Mu'izNo ratings yet
- Worthy - Elevation WorshipDocument1 pageWorthy - Elevation WorshipSabine J.100% (1)
- LP PG Conversion To Thar CoalDocument3 pagesLP PG Conversion To Thar CoalRaja Zeeshan100% (1)
- Minitek Indore Profile 2Document9 pagesMinitek Indore Profile 2kunal agiwaleNo ratings yet
- Miniaturized 90 Degree Hybrid Coupler Using High Dielectric Substrate For QPSK Modulator PDFDocument4 pagesMiniaturized 90 Degree Hybrid Coupler Using High Dielectric Substrate For QPSK Modulator PDFDenis CarlosNo ratings yet
- XMSDS Sunflower Seed Oil 9925156Document6 pagesXMSDS Sunflower Seed Oil 9925156Lisa RobertsonNo ratings yet
- Heliflex Hose CatalogueDocument119 pagesHeliflex Hose CatalogueAugustine DharmarajNo ratings yet
- Bathymetry and Its Applications PDFDocument158 pagesBathymetry and Its Applications PDFArseni MaximNo ratings yet
- 2011 02 Huijben Spie Why Every Urea Plant Needs A Continuous NC Meter PDFDocument9 pages2011 02 Huijben Spie Why Every Urea Plant Needs A Continuous NC Meter PDFfawadintNo ratings yet
- Impex Kitchen Appliances PDFDocument4 pagesImpex Kitchen Appliances PDFqwqw11No ratings yet
- Subjects Verbs PrepositionsDocument11 pagesSubjects Verbs Prepositionsგუგა ნოსელიძეNo ratings yet
- Melese Hotel ST ReportDocument74 pagesMelese Hotel ST ReportKidist MollaNo ratings yet
- Kant On Religion and ScienceDocument21 pagesKant On Religion and ScienceEduardo CharpenelNo ratings yet