You might also like
- Castigliano's TheoremsDocument13 pagesCastigliano's Theoremsabk1234100% (6)
- Mar 101Document568 pagesMar 101junee100% (2)
- The Kinematics Model of A Two-Wheeled Self-Balancing RobotDocument5 pagesThe Kinematics Model of A Two-Wheeled Self-Balancing RobotJason ArensNo ratings yet
- Wind Analysis For Shade Open Structure Based On ASCE 7-16 Input DataDocument8 pagesWind Analysis For Shade Open Structure Based On ASCE 7-16 Input DataaantceNo ratings yet
- Robotics Question BankDocument8 pagesRobotics Question BankmsckoneruNo ratings yet
- The Mechanical Design of Sanke-Arm RobotDocument4 pagesThe Mechanical Design of Sanke-Arm RobotNikhil GargNo ratings yet
- Paper - Dynamic Modelling and Analysis of An Omnidirectional Mobile RobotDocument6 pagesPaper - Dynamic Modelling and Analysis of An Omnidirectional Mobile Robotgabrielchanq99No ratings yet
- 10 - A Spherical Hopping Robot For Exploration in Complex EnvironmentsDocument6 pages10 - A Spherical Hopping Robot For Exploration in Complex EnvironmentsjowdiverNo ratings yet
- Zhao 2009Document6 pagesZhao 2009AriNo ratings yet
- Stiffness Simulation of Joints of Large Manipulators Based On Cam Torsion Spring MechanismsDocument10 pagesStiffness Simulation of Joints of Large Manipulators Based On Cam Torsion Spring MechanismsashnekNo ratings yet
- 3 D o F Parallel Delta Inverse ISR2004Document7 pages3 D o F Parallel Delta Inverse ISR2004ahmedNo ratings yet
- Art of Elct Fragment 1Document12 pagesArt of Elct Fragment 1Victor HugoNo ratings yet
- 10 1109@icarcv 2018 8581132Document6 pages10 1109@icarcv 2018 8581132Norbert John IberaNo ratings yet
- Modeling Rolling Gaits of A Snake Robot: Weikun Zhen, Chaohui Gong and Howie ChosetDocument6 pagesModeling Rolling Gaits of A Snake Robot: Weikun Zhen, Chaohui Gong and Howie Chosetpepe GoNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument27 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistssaintyilmazNo ratings yet
- Development of Flexible Telescopic Boom Model Using Absolute Nodal Coordinate Formulation Sliding Joint Constraints With Lugre FrictionDocument6 pagesDevelopment of Flexible Telescopic Boom Model Using Absolute Nodal Coordinate Formulation Sliding Joint Constraints With Lugre FrictionHà LầuNo ratings yet
- MechVib Assign2Document2 pagesMechVib Assign2Genesis Lissette Loyola OrtizNo ratings yet
- Bogdan 2014Document7 pagesBogdan 2014Aswinkumar KNNo ratings yet
- The 3d Linear Inverted Pendulum Mode A Simple Modeling For A BipDocument8 pagesThe 3d Linear Inverted Pendulum Mode A Simple Modeling For A BipDr.SUNI MARY VARGHESENo ratings yet
- PataraiaDocument11 pagesPataraiaagni.tuphanNo ratings yet
- Compliant Control of The Body Shape of Snake RobotsDocument8 pagesCompliant Control of The Body Shape of Snake RobotsOmar FahmyNo ratings yet
- Analysis On Dynamics For Flexible Leg of ICPF Actuated Tortoise-Like Micro-RobotDocument6 pagesAnalysis On Dynamics For Flexible Leg of ICPF Actuated Tortoise-Like Micro-RobotAlireza PahlevanzadehNo ratings yet
- Mathematical Association of America Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To The American Mathematical MonthlyDocument10 pagesMathematical Association of America Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To The American Mathematical MonthlyAmino fileNo ratings yet
- 10 1 1 80 2969 PDFDocument6 pages10 1 1 80 2969 PDFAbdulGhaffarNo ratings yet
- Self-Organization of A Wheeled Robotic Swarm Using Virtual Spring-Damper MeshDocument16 pagesSelf-Organization of A Wheeled Robotic Swarm Using Virtual Spring-Damper MeshIAES International Journal of Robotics and AutomationNo ratings yet
- A New 6-DOF Parallel Robot With Simple Kinematic Model: Nicholas Seward, Ilian A. Bonev, Senior Member, IEEEDocument6 pagesA New 6-DOF Parallel Robot With Simple Kinematic Model: Nicholas Seward, Ilian A. Bonev, Senior Member, IEEEAhmedSeragNo ratings yet
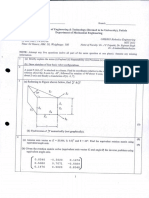
- IAS Mains Mechanical Engineering 1989Document7 pagesIAS Mains Mechanical Engineering 1989rajanikant02423No ratings yet
- Experimental Behaviour and Numerical Analysis of Dampers MR DampersDocument10 pagesExperimental Behaviour and Numerical Analysis of Dampers MR DampersAnthea AbreoNo ratings yet
- Dynamic Modeling, Simulation and Velocity Control of Rocker-Bogie Rover For Space ExplorationDocument21 pagesDynamic Modeling, Simulation and Velocity Control of Rocker-Bogie Rover For Space ExplorationKotadpp KumarNo ratings yet
- Politecnico Di Torino Porto Institutional RepositoryDocument7 pagesPolitecnico Di Torino Porto Institutional RepositoryNavamaniSpNo ratings yet
- Dynamic Balancing of The SCARA Robot: To Cite This VersionDocument9 pagesDynamic Balancing of The SCARA Robot: To Cite This VersionBAUTISTA BORDA ALEXANDERNo ratings yet
- Coupled Bending Torsional Vibration of Rotors Using Finite ElementDocument20 pagesCoupled Bending Torsional Vibration of Rotors Using Finite ElementmanojNo ratings yet
- 07748042Document5 pages07748042narayana hegdeNo ratings yet
- 9 - On The Stability of Indirect ZMP Controller For Biped Robot System - 10.1109@iros.2004.1389686Document6 pages9 - On The Stability of Indirect ZMP Controller For Biped Robot System - 10.1109@iros.2004.1389686Riyanto Dhiya FikriNo ratings yet
- The Cubli: A Reaction Wheel Based 3D Inverted PendulumDocument7 pagesThe Cubli: A Reaction Wheel Based 3D Inverted Pendulumbula69No ratings yet
- Isr 2013 6695721Document5 pagesIsr 2013 6695721Duy KhổngNo ratings yet
- Nonlinear Inelastic Analysis of Space Steel Frames Using The Generalized Displacement Control MethodDocument6 pagesNonlinear Inelastic Analysis of Space Steel Frames Using The Generalized Displacement Control MethodingAlecuNo ratings yet
- Velocity and Position Control of A Wheel 2 PDFDocument9 pagesVelocity and Position Control of A Wheel 2 PDFdannyabeNo ratings yet
- IEEE Conference TemplateDocument5 pagesIEEE Conference TemplateArbaz KhanNo ratings yet
- Design and Simulation For Kinematic Characteristics of A Tripod Mechanism For Biped RobotsDocument9 pagesDesign and Simulation For Kinematic Characteristics of A Tripod Mechanism For Biped Robots王根萌No ratings yet
- Trifilar PendDocument7 pagesTrifilar PendPranav RaveendranNo ratings yet
- Paper 1Document1 pagePaper 1adam_domadorNo ratings yet
- Chapter 5Document39 pagesChapter 5HemantNo ratings yet
- Mobile Robot PaperDocument9 pagesMobile Robot PaperAryan Singh BoraNo ratings yet
- Article V04Document7 pagesArticle V04Duy KhổngNo ratings yet
- Comparison of Heald Frame Motion Generated by Rotary Dobby and Crank & Cam Shedding MotionsDocument6 pagesComparison of Heald Frame Motion Generated by Rotary Dobby and Crank & Cam Shedding MotionsKannan KumarNo ratings yet
- MEC509J2NT2Document12 pagesMEC509J2NT2thamizmani100% (1)
- Single Actuator Wave-Like Robot (SAW) : Design, Modeling, and ExperimentsDocument14 pagesSingle Actuator Wave-Like Robot (SAW) : Design, Modeling, and ExperimentsAnonymous EP15XmgNo ratings yet
- 1992 ASCE (1992) Seismic Response of Rotating MachinesDocument16 pages1992 ASCE (1992) Seismic Response of Rotating MachinesBilal LoveNo ratings yet
- K.G.S. DarshanaDocument3 pagesK.G.S. DarshanaSaransh JainNo ratings yet
- Design and Analysis of The Properties of The Delta Inverse RobotDocument7 pagesDesign and Analysis of The Properties of The Delta Inverse RobotmohsenNo ratings yet
- Wave-Like Locomotion of A Snake Robot: Mathematical Modelling and SimulationDocument12 pagesWave-Like Locomotion of A Snake Robot: Mathematical Modelling and SimulationTJPRC PublicationsNo ratings yet
- Intro2Robotics Sample QuestionsDocument3 pagesIntro2Robotics Sample Questionsbaboiu electricNo ratings yet
- Dynamic Stair Walking of Biped Humanoid RobotsDocument6 pagesDynamic Stair Walking of Biped Humanoid Robotstran the baoNo ratings yet
- Stickman Towards A Human Scale Acrobatic Robot PaperDocument7 pagesStickman Towards A Human Scale Acrobatic Robot PaperstevecraigNo ratings yet
- General Solution For The Dynamic Modeling of Parallel RobotsDocument6 pagesGeneral Solution For The Dynamic Modeling of Parallel RobotsHuynh TLoiNo ratings yet
- Theoretical Analysis and Experimental Study of Springback Mechanism of Archwire BendingDocument7 pagesTheoretical Analysis and Experimental Study of Springback Mechanism of Archwire BendingEndang FirmansyahNo ratings yet
- Shape Optimisation of The SEAREV Wave Energy ConverterDocument6 pagesShape Optimisation of The SEAREV Wave Energy ConverterSergi MotoNo ratings yet
- Torsion Pendulum A Mechanical Nonlinear OscillatorDocument7 pagesTorsion Pendulum A Mechanical Nonlinear OscillatorLeo ChakravartyNo ratings yet
- Ume805 2Document2 pagesUme805 2Raunaq SinghNo ratings yet
- Ball Roller and Gear Robot With Newton EulerDocument13 pagesBall Roller and Gear Robot With Newton EulerShivi SivaNo ratings yet
- Modeling and Control of A Hybrid Wheeled LeggedDocument9 pagesModeling and Control of A Hybrid Wheeled Leggedstd xiaoliangNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- CT2N Wiper Control System User ManualDocument13 pagesCT2N Wiper Control System User ManualjowdiverNo ratings yet
- Motor VFDDocument3 pagesMotor VFDjowdiverNo ratings yet
- 17 - Adaptive Control of Inertially Actuated Bouncing Robot (Important!)Document11 pages17 - Adaptive Control of Inertially Actuated Bouncing Robot (Important!)jowdiverNo ratings yet
- 11 - Design and Analysis of A Spherical Robot With Rolling and Jumping Modes For Deep Space ExplorationDocument14 pages11 - Design and Analysis of A Spherical Robot With Rolling and Jumping Modes For Deep Space ExplorationjowdiverNo ratings yet
- 2 - Hop Hop Hopbots! Designers of Small, Mobile Robots Take Cues From Grasshoppers and FrogsDocument4 pages2 - Hop Hop Hopbots! Designers of Small, Mobile Robots Take Cues From Grasshoppers and FrogsjowdiverNo ratings yet
- Analysis of LaminatedDocument31 pagesAnalysis of LaminatedKaustubh JadhavNo ratings yet
- 19.03.22 & 21.03.22 - JR - STAR CO SUPER CHAINA - MODEL-A&B - SYLLABUS CLARIFICATIONDocument2 pages19.03.22 & 21.03.22 - JR - STAR CO SUPER CHAINA - MODEL-A&B - SYLLABUS CLARIFICATIONLalith Kumar Reddy VediumNo ratings yet
- Summary Notes - Topic 3 Waves - Edexcel Physics IGCSEDocument5 pagesSummary Notes - Topic 3 Waves - Edexcel Physics IGCSEVarsha PNo ratings yet
- Preliminary Data Sheet - Experiment 3 - Group4Document5 pagesPreliminary Data Sheet - Experiment 3 - Group4Grace HipolitoNo ratings yet
- Kinetic Theory of Gases and RadiationsDocument19 pagesKinetic Theory of Gases and RadiationsGajanan ThosareNo ratings yet
- Solution of DPP # 2: PhysicsDocument11 pagesSolution of DPP # 2: PhysicsshubhamNo ratings yet
- IJIRAE::An Overviewof Analysis, Measurement and Modelling of Dynamics Properties of Composite Materials Using Oberst Beam MethodDocument4 pagesIJIRAE::An Overviewof Analysis, Measurement and Modelling of Dynamics Properties of Composite Materials Using Oberst Beam MethodIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- EFMDocument2 pagesEFMMurugan ShanmugamNo ratings yet
- Assignment 3Document3 pagesAssignment 3Vandit GoyalNo ratings yet
- Rock Slope StabilityDocument4 pagesRock Slope StabilityAparna CkNo ratings yet
- Assignment 2: Due Date: March 02, 2020, 04:01 P.M. in The Orange BoxDocument3 pagesAssignment 2: Due Date: March 02, 2020, 04:01 P.M. in The Orange BoxAhmed AliNo ratings yet
- FunDBitS - Report D.1 - Fin PDFDocument416 pagesFunDBitS - Report D.1 - Fin PDFprashant_cool_4_uNo ratings yet
- ps2 SolutionsDocument8 pagesps2 SolutionsJulcris JimenezNo ratings yet
- SPP-4 - Physics - (JEE Advanced)Document4 pagesSPP-4 - Physics - (JEE Advanced)anilpurnimakothariNo ratings yet
- 2008 Pfeiffer Modelling of Cowl Performance in Building Simulation Tools Using Experimental Data and Computational Uid DynamicsDocument12 pages2008 Pfeiffer Modelling of Cowl Performance in Building Simulation Tools Using Experimental Data and Computational Uid DynamicsSánchez AangNo ratings yet
- Channel OptimizationDocument10 pagesChannel OptimizationMutahir AbbasNo ratings yet
- Experiment 3Document13 pagesExperiment 3Hazel GamezNo ratings yet
- Cudbocmz 4802Document3 pagesCudbocmz 4802Siddharth ShankarNo ratings yet
- Kami Export - Review Ap Physics 1 2022-23 1Document39 pagesKami Export - Review Ap Physics 1 2022-23 1api-670563796No ratings yet
- BioulDocument29 pagesBioulvangoetheNo ratings yet
- CHRISTINE - Masses & Springs Lab PHet 2021Document2 pagesCHRISTINE - Masses & Springs Lab PHet 2021Chrissy SkyeNo ratings yet
- Micropropulsion For Space - A Survey of MEMS-based Micro Thrusters and Their Solid Propellant TechnologyDocument36 pagesMicropropulsion For Space - A Survey of MEMS-based Micro Thrusters and Their Solid Propellant TechnologyAssem HNo ratings yet
- Food Analysis-6Document25 pagesFood Analysis-6MD. Humayun KobirNo ratings yet
- College Physics 4th Edition Giambattista Test Bank 1Document31 pagesCollege Physics 4th Edition Giambattista Test Bank 1tracy100% (38)
- Scalar and Vector Quantities Answer KeyDocument4 pagesScalar and Vector Quantities Answer KeyVinsuiCzar BaylonNo ratings yet
- Properties of Fluids Unit DimensionsDocument49 pagesProperties of Fluids Unit DimensionsSangetha ChelladoraiNo ratings yet
- AUSTROADS List of Test MethodsDocument1 pageAUSTROADS List of Test Methodsतिप्लोकाची तिरुनचिपल्ली केरकेट्टाNo ratings yet