You might also like
- Hu, Fei - Vehicle-To-Vehicle and Vehicle-To-Infrastructure Communications - A Technical Approach-Taylor & Francis - CRC Press (2018)Document363 pagesHu, Fei - Vehicle-To-Vehicle and Vehicle-To-Infrastructure Communications - A Technical Approach-Taylor & Francis - CRC Press (2018)Javier IzquierdoNo ratings yet
- Intelligent Vehicular Networks and Communications: Fundamentals, Architectures and SolutionsFrom EverandIntelligent Vehicular Networks and Communications: Fundamentals, Architectures and SolutionsRating: 1 out of 5 stars1/5 (1)
- Internal - Audit - Manual - World Intellectual PropertyDocument25 pagesInternal - Audit - Manual - World Intellectual PropertyEric AnastacioNo ratings yet
- A Historical Perspective and ReviewDocument49 pagesA Historical Perspective and ReviewXiaoying LiuNo ratings yet
- Munications For Railway Applications K5t8u Iji8fDocument135 pagesMunications For Railway Applications K5t8u Iji8fAlfrecron Oneone100% (1)
- CANoe Car2x Product Information EN PDFDocument19 pagesCANoe Car2x Product Information EN PDFChaos XiaNo ratings yet
- Simulation of Traffic Movement in Vanet Using Sumo: by AJAY KUMAR PANDEY (109cs0588)Document36 pagesSimulation of Traffic Movement in Vanet Using Sumo: by AJAY KUMAR PANDEY (109cs0588)ferronatto11No ratings yet
- Capacity Analysis of Vehicular Communication Networks: Ning Lu Xuemin (Sherman) ShenDocument91 pagesCapacity Analysis of Vehicular Communication Networks: Ning Lu Xuemin (Sherman) ShenRemberto SandovalNo ratings yet
- AIOTI IoT Relation and Impact On 5G - V1a 1Document74 pagesAIOTI IoT Relation and Impact On 5G - V1a 1rajibuleceNo ratings yet
- CAN For Vehicles HugoProvencher 2Document67 pagesCAN For Vehicles HugoProvencher 2Skyline DvNo ratings yet
- Communication GosdaDocument34 pagesCommunication GosdaChethanNo ratings yet
- Journal of Network and Computer Applications: MD Whaiduzzaman, Mehdi Sookhak, Abdullah Gani, Rajkumar BuyyaDocument20 pagesJournal of Network and Computer Applications: MD Whaiduzzaman, Mehdi Sookhak, Abdullah Gani, Rajkumar BuyyaMina MohammadiNo ratings yet
- Security in VanetsDocument11 pagesSecurity in VanetsEduardo Topan Joice OrzechowskiNo ratings yet
- Vehicular Communication System: University of Management and Technology, LahoreDocument12 pagesVehicular Communication System: University of Management and Technology, LahoreEemanNo ratings yet
- Connected Vehicles, Zonal in Vehicle Network ArchitectureDocument5 pagesConnected Vehicles, Zonal in Vehicle Network ArchitectureEditor IJTSRDNo ratings yet
- Unmanned Aerial Vehicle Applications Over Cellular Networks For 5G and BeyondDocument231 pagesUnmanned Aerial Vehicle Applications Over Cellular Networks For 5G and BeyondÖzgür ŞEN100% (1)
- 5G Edge Automation Optimization InDesign 1Document40 pages5G Edge Automation Optimization InDesign 1Ricardo ToyerosNo ratings yet
- Design and Validation Process of In-Vehicle EmbeddDocument38 pagesDesign and Validation Process of In-Vehicle EmbeddAditya NehraNo ratings yet
- SRS Vanet ProjectDocument10 pagesSRS Vanet ProjectSourabhNo ratings yet
- Flexngia: A Flexible Internet Architecture For The Next-Generation Tactile InternetDocument35 pagesFlexngia: A Flexible Internet Architecture For The Next-Generation Tactile InternetLawyer GuideNo ratings yet
- Impact of Inter Vehicle Communication (IVC) On Network and Road Traffic Simulation Using Bidirectional Coupled Network Through One Hop Broadcasting TechniqueDocument6 pagesImpact of Inter Vehicle Communication (IVC) On Network and Road Traffic Simulation Using Bidirectional Coupled Network Through One Hop Broadcasting TechniqueseventhsensegroupNo ratings yet
- 79 1520674884 - 10-03-2018 PDFDocument9 pages79 1520674884 - 10-03-2018 PDFRahul SharmaNo ratings yet
- Driverless VehiclesDocument13 pagesDriverless Vehiclesprg2710No ratings yet
- Realistic Simulation of Vehicular Network in Urban and Semi-Urban Area of IndiaDocument10 pagesRealistic Simulation of Vehicular Network in Urban and Semi-Urban Area of IndiaIJRASETPublicationsNo ratings yet
- Asynchronous Transfer Mode (ATM)Document67 pagesAsynchronous Transfer Mode (ATM)sai420No ratings yet
- Analyzing MEC Architectural Implications For LTE/LTE-A:, 2016 Last Update May 4, 2016Document28 pagesAnalyzing MEC Architectural Implications For LTE/LTE-A:, 2016 Last Update May 4, 2016garzuloNo ratings yet
- Ph.D. End Term PresentationDocument63 pagesPh.D. End Term PresentationSachin GuptaNo ratings yet
- Saved On DB PDFDocument57 pagesSaved On DB PDFVivek AnandNo ratings yet
- 5G-PPP SoftNets WG Whitepaper v20Document38 pages5G-PPP SoftNets WG Whitepaper v20ashishsinghchouhanNo ratings yet
- Understanding Information Centric Networking and Mobile Edge ComputingDocument24 pagesUnderstanding Information Centric Networking and Mobile Edge Computingtriple_patteNo ratings yet
- Technical Report On Proof of ConceptDocument74 pagesTechnical Report On Proof of ConceptSubhanullah OmarkhilNo ratings yet
- Wa0001.Document6 pagesWa0001.Christy BinuNo ratings yet
- Deliverable D1.2.6: Final Liaison DocumentationDocument20 pagesDeliverable D1.2.6: Final Liaison DocumentationAndrea NarcisoNo ratings yet
- 570 ArticleText 1683 2 10 20200919Document5 pages570 ArticleText 1683 2 10 20200919Daniel braveNo ratings yet
- Nandini Mehta 729718Document33 pagesNandini Mehta 729718mehtanandini2004No ratings yet
- W LL 20 FundamentalsDocument23 pagesW LL 20 FundamentalsNicky de ImperfectionalistNo ratings yet
- PIARC Special Project "Smart Roads Classification": ProposalDocument34 pagesPIARC Special Project "Smart Roads Classification": ProposalvagnerstefanelloNo ratings yet
- Measurement and Analysis of Traffic StreDocument180 pagesMeasurement and Analysis of Traffic StreAbdulfatah Kasim ImanNo ratings yet
- v64 23Document4 pagesv64 23srikandiujungNo ratings yet
- 5G Oriented OTN Technology 5G Oriented ODocument40 pages5G Oriented OTN Technology 5G Oriented Ohas samNo ratings yet
- 1 Vehicular Connectivity: C-V2X & 5G - September 2021Document34 pages1 Vehicular Connectivity: C-V2X & 5G - September 2021dn007No ratings yet
- Automotive Network Architecture For Ecus Communications: April 2009Document27 pagesAutomotive Network Architecture For Ecus Communications: April 2009Wagner PolloNo ratings yet
- Intelligent Transportation SystemDocument13 pagesIntelligent Transportation SystemZION LIFENo ratings yet
- Industrial Networks PDFDocument39 pagesIndustrial Networks PDFlakshmi_innovatorNo ratings yet
- Omni Product GuideDocument33 pagesOmni Product Guidetstacct543No ratings yet
- 4th Wireless Transport PoC Detailed-ReportDocument32 pages4th Wireless Transport PoC Detailed-ReportchaminkvNo ratings yet
- Visible Light CommDocument63 pagesVisible Light CommSunil YadavNo ratings yet
- Zonal-Architecture-White-Paper (Tendencias Automotrices)Document24 pagesZonal-Architecture-White-Paper (Tendencias Automotrices)JESUS JUAREZ PEÑUELANo ratings yet
- Vehicular Ad-Hoc Using MatlabDocument110 pagesVehicular Ad-Hoc Using MatlabAyshwar Venkatesh0% (1)
- Advances in Vehicular Networking TechnologiesDocument442 pagesAdvances in Vehicular Networking TechnologiesJosé RamírezNo ratings yet
- Time-Sensitive Networking in Automotive Embedded Systems - State of The Art and Research OpportunitiesDocument15 pagesTime-Sensitive Networking in Automotive Embedded Systems - State of The Art and Research Opportunitiessmyethdrath24No ratings yet
- 1703 Heaton 3080 PaperDocument24 pages1703 Heaton 3080 PaperSalimElzwawiNo ratings yet
- Introduction To Wireless Sensor Networks: January 2015Document34 pagesIntroduction To Wireless Sensor Networks: January 2015Hadjer mNo ratings yet
- To Enhance Security & Efficiency of VANET Routing Protocol Using VWCADocument5 pagesTo Enhance Security & Efficiency of VANET Routing Protocol Using VWCAInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Deliverable D2.4 Final Release of The SDKDocument33 pagesDeliverable D2.4 Final Release of The SDKgkoutNo ratings yet
- Introduction To Wireless Sensor Networks: January 2015Document34 pagesIntroduction To Wireless Sensor Networks: January 2015Surya PrabhaNo ratings yet
- Traffic and Road Condition Monitoring System: M.Tech - Stage 1 ReportDocument26 pagesTraffic and Road Condition Monitoring System: M.Tech - Stage 1 ReportjairofgfNo ratings yet
- Intelligent Transport Systems: Technologies and ApplicationsFrom EverandIntelligent Transport Systems: Technologies and ApplicationsAsier PerallosNo ratings yet
- Vehicular Networking: Automotive Applications and BeyondFrom EverandVehicular Networking: Automotive Applications and BeyondMarc EmmelmannNo ratings yet
- Network Convergence: Ethernet Applications and Next Generation Packet Transport ArchitecturesFrom EverandNetwork Convergence: Ethernet Applications and Next Generation Packet Transport ArchitecturesNo ratings yet
- Industrial Sensors and Controls in Communication Networks: From Wired Technologies to Cloud Computing and the Internet of ThingsFrom EverandIndustrial Sensors and Controls in Communication Networks: From Wired Technologies to Cloud Computing and the Internet of ThingsNo ratings yet
- Ergonomics For Children and Youth in The Educational EnvironmentDocument61 pagesErgonomics For Children and Youth in The Educational EnvironmentRabia AzharNo ratings yet
- M35205EN - PDF Syringe Pump PDFDocument45 pagesM35205EN - PDF Syringe Pump PDFKroumson Ben AboubacarNo ratings yet
- Samsung Le23r86bd Le26r86bd Le32r86bd Le37r86bd Le40r86bd Le23r87bd Le26r87bd Le32r87bd Le37r87bd Le40r87bd CH Gbp23-26-32-37-40sen Service ManualDocument139 pagesSamsung Le23r86bd Le26r86bd Le32r86bd Le37r86bd Le40r86bd Le23r87bd Le26r87bd Le32r87bd Le37r87bd Le40r87bd CH Gbp23-26-32-37-40sen Service ManualRodrigo BenitezNo ratings yet
- A VHDL Design of A JPEG Still Image Compression Standard DecoderDocument280 pagesA VHDL Design of A JPEG Still Image Compression Standard DecoderDer BraNo ratings yet
- Manjit Singh Role of Electronics and Communication Engineering ECE in Technological RevolutionDocument7 pagesManjit Singh Role of Electronics and Communication Engineering ECE in Technological RevolutionTorong VNo ratings yet
- Evaluation of Online Tools: Dos and Don'ts: Unit 4Document28 pagesEvaluation of Online Tools: Dos and Don'ts: Unit 4DANNY PAUCARNo ratings yet
- ERP Project Management Is Key To A Successful ImplementationDocument24 pagesERP Project Management Is Key To A Successful ImplementationwaduroNo ratings yet
- Videoaula 33 - Módulo 10 Steve Jobs' 2005 Stanford Commencement Address Part 5 - EnglishDocument3 pagesVideoaula 33 - Módulo 10 Steve Jobs' 2005 Stanford Commencement Address Part 5 - EnglishLuiz DantasNo ratings yet
- Contents:-: Temperature Sensor and ControlDocument34 pagesContents:-: Temperature Sensor and ControlTarun Gupta100% (4)
- Number Theory: Bachelor of Secondary EducationDocument1 pageNumber Theory: Bachelor of Secondary EducationRea Mariz JordanNo ratings yet
- Dasun Edirisinghe: John Keells IT, Sri Lanka - Lead UI / UX DesignerDocument3 pagesDasun Edirisinghe: John Keells IT, Sri Lanka - Lead UI / UX Designerdazunj919No ratings yet
- Modeling of Welded Connections in Solidworks Simulation: January 2011Document6 pagesModeling of Welded Connections in Solidworks Simulation: January 2011King1971No ratings yet
- Dell Systm Esuprt Tool v3.7 Concept Guide en UsDocument67 pagesDell Systm Esuprt Tool v3.7 Concept Guide en UsWolney DiasNo ratings yet
- Science and Technology Have Done More Harm Than Goo1Document5 pagesScience and Technology Have Done More Harm Than Goo1Ashton Poovarasu JhonsonNo ratings yet
- Satchit ResumeDocument1 pageSatchit ResumeAJones394No ratings yet
- Data Protection Laws of The World: MalaysiaDocument8 pagesData Protection Laws of The World: MalaysiaPutera Najmi Ratna Anati Bin NasirNo ratings yet
- Brand Preference of Mobile Phones With Special Reference To Motorola Phones"Document78 pagesBrand Preference of Mobile Phones With Special Reference To Motorola Phones"Harsh PrakashNo ratings yet
- Account Assignment Category in SAP MMDocument4 pagesAccount Assignment Category in SAP MMiamnarendranNo ratings yet
- Z Commusage UpdateDocument9 pagesZ Commusage UpdateSarut LapthaweechokNo ratings yet
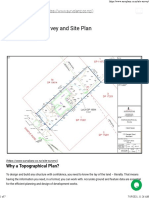
- Topographical Survey and Site Plan - SurvplanzDocument7 pagesTopographical Survey and Site Plan - SurvplanzEndashaw DebruNo ratings yet
- Maada Walabu University: College of Business and Economics Department of ManagementDocument47 pagesMaada Walabu University: College of Business and Economics Department of Managementzelalem wegayehuNo ratings yet
- Activity 3 THE DATABASE CONCEPTSDocument4 pagesActivity 3 THE DATABASE CONCEPTSRichille SordillaNo ratings yet
- BJ Imagine Slider TutorialDocument16 pagesBJ Imagine Slider TutorialanndyrogersNo ratings yet
- Product List at EtonDocument4 pagesProduct List at EtonDean Jones QueltadenNo ratings yet
- Schematic, Amplifier Channel, Ex 4000-B Schematic, Amplifier Channel, Ex 4000-BDocument6 pagesSchematic, Amplifier Channel, Ex 4000-B Schematic, Amplifier Channel, Ex 4000-BsolidmfXD1995No ratings yet
- Post Paid Plan AIRTEL - 2011ITC - RT2Document2 pagesPost Paid Plan AIRTEL - 2011ITC - RT2Raja ShekharNo ratings yet
- Rishabh Mehta Resume UpdatedDocument1 pageRishabh Mehta Resume UpdatedNehal ShamsNo ratings yet
- 200-120CCNA Cisco Certified Network Associate CCNA (803) 2014-06-02Document8 pages200-120CCNA Cisco Certified Network Associate CCNA (803) 2014-06-02Christine Wood100% (1)
- Dolibarr and Odoo ComparisionDocument10 pagesDolibarr and Odoo ComparisionPrinceKhurramNo ratings yet