You might also like
- Robotics MCQDocument21 pagesRobotics MCQSURENDER B78% (9)
- Project Standards and Specifications Metallic Expansion Joint Rev01Document4 pagesProject Standards and Specifications Metallic Expansion Joint Rev01hiyeonNo ratings yet
- Robotics MCQDocument12 pagesRobotics MCQRahul Thorat71% (14)
- Robotics MCQ 1Document25 pagesRobotics MCQ 1Siva Raman100% (4)
- 3340 Lectures 7 To 12 S1 2015Document61 pages3340 Lectures 7 To 12 S1 2015utsav_koshtiNo ratings yet
- Iar MCQDocument15 pagesIar MCQdpshradhaNo ratings yet
- ETM Unit3 MCQ'sDocument10 pagesETM Unit3 MCQ'ssagarpatil03012No ratings yet
- Robotics Quiz - With AnswerDocument4 pagesRobotics Quiz - With AnswerSatheesh KumarNo ratings yet
- Robotics Quiz - With AnswerDocument4 pagesRobotics Quiz - With AnswerSatheesh KumarNo ratings yet
- Robotics Sample MCQDocument8 pagesRobotics Sample MCQvasanthsat100% (1)
- Question Set For 7 TH Sem RoboticsDocument7 pagesQuestion Set For 7 TH Sem RoboticsPriyadarshan MahanaNo ratings yet
- RMV MCQDocument12 pagesRMV MCQRebecca MeyersNo ratings yet
- A) Smoke Sensor B) Temperature Sensors C) Pressure Sensor D) All Ans: AllDocument7 pagesA) Smoke Sensor B) Temperature Sensors C) Pressure Sensor D) All Ans: AllKunal AhiwaleNo ratings yet
- Multiple Choice QuestionsDocument5 pagesMultiple Choice QuestionsNel Sweetie0% (1)
- 8 Sem AIP MCQDocument11 pages8 Sem AIP MCQRishabh DeshpandeNo ratings yet
- ARM IA BankDocument10 pagesARM IA Banksan4u401No ratings yet
- Objectve Question Bank - RoboticsDocument7 pagesObjectve Question Bank - RoboticsSanjeev PreetamNo ratings yet
- 50 MCQDocument10 pages50 MCQprabhaNo ratings yet
- 1 Advanced Mould Manufacturing TechniquesDocument14 pages1 Advanced Mould Manufacturing Techniquescipet imphal100% (1)
- 1-Robot Is Derived From Czech WordDocument10 pages1-Robot Is Derived From Czech WordprabhaNo ratings yet
- MCQ Robotics M Tech II TermDocument10 pagesMCQ Robotics M Tech II TermMechanical Engineering (ME) DepartmentNo ratings yet
- ACFrOgCOK3eyg1J UWlU5cqkQl1eGVQ527MfFnATiIsjSswcfjJYK t1AgyIE4FDlxrpxWIaPIyESXdsU 6UAdPUNMzltSGntyUOyhpmrzf TiixyYCf4yF0Q3djfKMwv5SDTjNIXAm6cLcce0AdDocument9 pagesACFrOgCOK3eyg1J UWlU5cqkQl1eGVQ527MfFnATiIsjSswcfjJYK t1AgyIE4FDlxrpxWIaPIyESXdsU 6UAdPUNMzltSGntyUOyhpmrzf TiixyYCf4yF0Q3djfKMwv5SDTjNIXAm6cLcce0AdrijuNo ratings yet
- A) B) C) D) : Part A: Review Questions (40 Points) I. Mcqs (10 Points)Document21 pagesA) B) C) D) : Part A: Review Questions (40 Points) I. Mcqs (10 Points)khalil alhatab83% (6)
- Cim MCQDocument27 pagesCim MCQAmisha MankarNo ratings yet
- MCQ - Unit 6 AutomationDocument3 pagesMCQ - Unit 6 AutomationDipak naikNo ratings yet
- Ans ADocument9 pagesAns Aashok pradhanNo ratings yet
- Course: B.Tech Department: Year: Subject Name: Faculty Name: Unit-IDocument15 pagesCourse: B.Tech Department: Year: Subject Name: Faculty Name: Unit-IRishiNo ratings yet
- RoboticsDocument10 pagesRoboticsJezer Ekstra IlaoNo ratings yet
- Iar 300 MCQDocument51 pagesIar 300 MCQdpshradhaNo ratings yet
- CNC 3Document12 pagesCNC 3Ritesh PatelNo ratings yet
- Control MCQDocument11 pagesControl MCQravihbtiNo ratings yet
- MCQDocument5 pagesMCQprabhaNo ratings yet
- Cad Cam Cae MCQ Question BankDocument8 pagesCad Cam Cae MCQ Question BankP DargopatilNo ratings yet
- Robotics ProperDocument182 pagesRobotics PropermacxNo ratings yet
- CNC Programing & MachiningDocument19 pagesCNC Programing & MachiningAkashNo ratings yet
- Cadm MCQ RevisionDocument17 pagesCadm MCQ Revision312817115009 D. Barathraj (IV - MHT)No ratings yet
- Mechanical Engineering RoboticsDocument17 pagesMechanical Engineering RoboticsShaikh SaadNo ratings yet
- Control Systems Multiple Choice Questions and Answers Preparation For Competition Exams PDFDocument2 pagesControl Systems Multiple Choice Questions and Answers Preparation For Competition Exams PDFUzair BukhariNo ratings yet
- Model QuDocument12 pagesModel QuSaurav NeupaneNo ratings yet
- Mechatronics 1290 QuestionsDocument279 pagesMechatronics 1290 Questions123 abcNo ratings yet
- Robo MCQDocument10 pagesRobo MCQShaikh SaadNo ratings yet
- Fem Jsrao Lec02Document16 pagesFem Jsrao Lec02Rajesh KanugulaNo ratings yet
- Unit No 3: Algebraic EquationDocument9 pagesUnit No 3: Algebraic EquationSample UseNo ratings yet
- ME 8791 - MCQs - MechatronicsDocument66 pagesME 8791 - MCQs - MechatronicsRajavignesh V RNo ratings yet
- Control Systems Mcqs First Two Units Ee and Ec Third YearDocument9 pagesControl Systems Mcqs First Two Units Ee and Ec Third YeardhananjayNo ratings yet
- Robo ImportantDocument6 pagesRobo ImportantkbabhinavNo ratings yet
- Control System Objective QuestionsDocument9 pagesControl System Objective QuestionsSoma SundarNo ratings yet
- Adv. CNC. 2nd Yr. Sep2023 Test QPDocument4 pagesAdv. CNC. 2nd Yr. Sep2023 Test QPOmkar KoreNo ratings yet
- Process Control MCQ FinalDocument25 pagesProcess Control MCQ FinalJebas ManovaNo ratings yet
- Control System (MCQS)Document26 pagesControl System (MCQS)Prakhar Pathak100% (1)
- Digital & Industrial ElectronicsDocument2 pagesDigital & Industrial ElectronicsHamza MustafaNo ratings yet
- Control Systems Multiple Choice Questions and Answers - April 2016Document7 pagesControl Systems Multiple Choice Questions and Answers - April 2016Ree Ismael HalasanNo ratings yet
- Production - Set ADocument7 pagesProduction - Set AShruti GuptaNo ratings yet
- MCQ On Control SystemDocument2 pagesMCQ On Control SystemRitesh PoudiyalNo ratings yet
- Department of Mechanical Engineering ME8094-Computer Integrated Manufacturing Systems Unit I - MCQ BankDocument10 pagesDepartment of Mechanical Engineering ME8094-Computer Integrated Manufacturing Systems Unit I - MCQ BankSanjayVaghelaNo ratings yet
- Be It QuestionDocument12 pagesBe It Questionsheham ihjamNo ratings yet
- Cam Q'SDocument6 pagesCam Q'STanush KumaarNo ratings yet
- 9Document5 pages9bassam abutraabNo ratings yet
- MCQ CollectionDocument3 pagesMCQ CollectionHiran Gabriel100% (1)
- Advanced Techniques and Technology of Computer-Aided Feedback ControlFrom EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNo ratings yet
- Funeec Solid Carbide - Price ListDocument12 pagesFuneec Solid Carbide - Price ListdpshradhaNo ratings yet
- Iar 300 MCQDocument51 pagesIar 300 MCQdpshradhaNo ratings yet
- Iar Question Bank UniversityDocument2 pagesIar Question Bank UniversitydpshradhaNo ratings yet
- 11 Industrial Engg - MCQDocument7 pages11 Industrial Engg - MCQdpshradhaNo ratings yet
- N & VDocument28 pagesN & VdpshradhaNo ratings yet
- Hyundai Air Circuit BreakerDocument2 pagesHyundai Air Circuit BreakerRoberto Alejandro Richards ValverdeNo ratings yet
- Sample Master ThesisDocument56 pagesSample Master ThesisAnirudh SreerajNo ratings yet
- 3.5 T Bolier ManualDocument206 pages3.5 T Bolier Manualchandravadiyaketan150467% (3)
- FY 2010 Community Development Block Grant Application - Stanhope Road Infrastructure Project - November 6, 2009Document69 pagesFY 2010 Community Development Block Grant Application - Stanhope Road Infrastructure Project - November 6, 2009seoversightNo ratings yet
- Wood FramingDocument92 pagesWood FramingBarjam KafexhiuNo ratings yet
- Belle Archaphorn - Resume 04-2015 3Document1 pageBelle Archaphorn - Resume 04-2015 3api-283133743No ratings yet
- Methodology For Development and Validation of Multipurpose Simulation ModelsDocument12 pagesMethodology For Development and Validation of Multipurpose Simulation ModelsgnanasekarNo ratings yet
- Structural Design and Construction Lecture 1Document26 pagesStructural Design and Construction Lecture 1Chong Ting ShengNo ratings yet
- Repair and Maintenance ProcedureDocument5 pagesRepair and Maintenance Proceduremacky PanuelosNo ratings yet
- Study in Taiwan Manual 20190918Document52 pagesStudy in Taiwan Manual 20190918lord fifaNo ratings yet
- CTLP 2012 Process Controls Course Outline Sept 2013Document3 pagesCTLP 2012 Process Controls Course Outline Sept 2013Kendall BirjueNo ratings yet
- Basics of Pipe Stress Analysis A Presentation-Part 2 of 2Document6 pagesBasics of Pipe Stress Analysis A Presentation-Part 2 of 2iaft100% (1)
- Power Systems Analytical Software ToolsDocument20 pagesPower Systems Analytical Software ToolsdskymaximusNo ratings yet
- Leave Management SystemDocument47 pagesLeave Management SystemReshma Hedaoo100% (1)
- Residential Slabs and Footings Workshop 1 DayDocument1 pageResidential Slabs and Footings Workshop 1 DayredpuffNo ratings yet
- C 1145073314Document2 pagesC 1145073314steam100deg8229No ratings yet
- Module 1 Engineering Design ProcessDocument16 pagesModule 1 Engineering Design ProcessvivekNo ratings yet
- Lab Sheet 2 (14DKM19F1007)Document10 pagesLab Sheet 2 (14DKM19F1007)Amirul RoslanNo ratings yet
- Design and Analysis of Composite Spur GeDocument12 pagesDesign and Analysis of Composite Spur GeMani MaranNo ratings yet
- BS in Archi Comparative CurriculumDocument2 pagesBS in Archi Comparative CurriculumRoldan SuazoNo ratings yet
- Astm D3740-11 PDFDocument7 pagesAstm D3740-11 PDFrokealphaNo ratings yet
- KAIST International Graduate Admission Guide For 2021 SpringDocument21 pagesKAIST International Graduate Admission Guide For 2021 SpringZul FaidilNo ratings yet
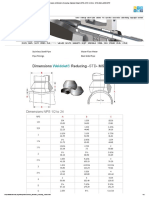
- Dimensions of Weldolets Reducing, Standard Weight (STD), NPS 1 - 2 (3 - 4) - NPS (20) 24, MSS-SP97Document2 pagesDimensions of Weldolets Reducing, Standard Weight (STD), NPS 1 - 2 (3 - 4) - NPS (20) 24, MSS-SP97Qiuniu100% (1)
- A Comparative Study of Bs8110 and Eurocode 2 Standards For Design of A Continuous Reinforced Concrete BeamDocument10 pagesA Comparative Study of Bs8110 and Eurocode 2 Standards For Design of A Continuous Reinforced Concrete BeamHồ Anh PhiNo ratings yet
- Commercial Block GIFT City - MEP-DBR-R0 PDFDocument142 pagesCommercial Block GIFT City - MEP-DBR-R0 PDFRamakrishnan SitaramanNo ratings yet
- Mobile Car Racing (3D Game)Document12 pagesMobile Car Racing (3D Game)Abdullah khanNo ratings yet
- 219 420401 12 PavementConnector (PCC) ForBridgeApproachSlabDocument1 page219 420401 12 PavementConnector (PCC) ForBridgeApproachSlabMes RubenNo ratings yet
- Software Configuration Management: Software Engineering: A Practitioner's Approach, 7/eDocument27 pagesSoftware Configuration Management: Software Engineering: A Practitioner's Approach, 7/eInformation TechnologyNo ratings yet