You might also like
- Modern Vehicle Braking and Dynamics SimulationDocument35 pagesModern Vehicle Braking and Dynamics SimulationFaizrul YusoffNo ratings yet
- Simulation of Vehicle Response To Throttle Tip-In and Tip-OutDocument38 pagesSimulation of Vehicle Response To Throttle Tip-In and Tip-OutPablo EscobarNo ratings yet
- Optimising Train Make-Up and Handling Through Longitudinal Train Dynamics SimulationDocument212 pagesOptimising Train Make-Up and Handling Through Longitudinal Train Dynamics SimulationRudy IndrawanNo ratings yet
- Autonomous Vehicle ControlDocument41 pagesAutonomous Vehicle ControlJames GillardNo ratings yet
- Vehicle Powertrain & DynamicsDocument18 pagesVehicle Powertrain & DynamicsSaad mubeenNo ratings yet
- Implementation and Evaluation of A Mass Estimation AlgorithmDocument49 pagesImplementation and Evaluation of A Mass Estimation AlgorithmRitesh SharmaNo ratings yet
- 2012 O'neillmscrDocument208 pages2012 O'neillmscrPCezzzNo ratings yet
- Designing and Optimizing Side-View Mirrors: Martin OlssonDocument97 pagesDesigning and Optimizing Side-View Mirrors: Martin OlssonAndrei StoicescuNo ratings yet
- NMBU Agricultural Mobile Robotic Platform Drivetrain and ControlDocument96 pagesNMBU Agricultural Mobile Robotic Platform Drivetrain and ControlHotib PerwiraNo ratings yet
- A Tool For Lap Time Simulation PDFDocument5 pagesA Tool For Lap Time Simulation PDFRodrigo BobNo ratings yet
- A Tool For Lap Time SimulationDocument5 pagesA Tool For Lap Time SimulationRodrigo BobNo ratings yet
- Umi Umd 2817Document106 pagesUmi Umd 2817Le ThanhNo ratings yet
- 1 s2.0 S0888613X99000195 MainDocument22 pages1 s2.0 S0888613X99000195 MainQiram IkhwanulNo ratings yet
- 2 67 1628858339 4ijmperdoct202144Document14 pages2 67 1628858339 4ijmperdoct202144TJPRC PublicationsNo ratings yet
- Diesel Combustion Modelling and Simulation For Torque Estimation PDFDocument66 pagesDiesel Combustion Modelling and Simulation For Torque Estimation PDFmechveenaNo ratings yet
- Building A Dynometer TestDocument57 pagesBuilding A Dynometer TestahmadNo ratings yet
- Thesis ProposalDocument60 pagesThesis ProposalSojibNo ratings yet
- Development and Analysis of A Multi Link SuspensionDocument100 pagesDevelopment and Analysis of A Multi Link SuspensionGianLucaNo ratings yet
- ES140205 - Sujit Parmeshwar Narwade 72-80Document9 pagesES140205 - Sujit Parmeshwar Narwade 72-80Kubilay AçıkgözNo ratings yet
- Mira CourseworkDocument15 pagesMira Coursework张三疯No ratings yet
- Hummer EV 4WS SystemDocument16 pagesHummer EV 4WS SystemTalhahassanNo ratings yet
- Masters Thesis MonashDocument97 pagesMasters Thesis Monashmohit sonawaneNo ratings yet
- On Generic Road Vehicle Motion Modelling and ControlDocument157 pagesOn Generic Road Vehicle Motion Modelling and ControlTimothyNo ratings yet
- Design of A Power Loss Model For VehicleDocument75 pagesDesign of A Power Loss Model For VehiclechoupoNo ratings yet
- Wheel Corner Module Technology and Concept AnalysisDocument83 pagesWheel Corner Module Technology and Concept AnalysisРуслан ИсмуллинNo ratings yet
- Dissertation On Electric VehiclesDocument5 pagesDissertation On Electric VehiclesWriteMyPaperApaFormatToledo100% (1)
- Modeling of A Formula Student Race Car in Matlab/Simulink With SimmechanicsDocument29 pagesModeling of A Formula Student Race Car in Matlab/Simulink With SimmechanicsDIECA STNo ratings yet
- 02 Whole PDFDocument210 pages02 Whole PDFNithael Mangolin Sampaio (New)No ratings yet
- Advances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Document34 pagesAdvances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Tyrone BerryNo ratings yet
- OPTIMIZATION OF A CAR SUSPENSION–STEERING LINKAGEDocument8 pagesOPTIMIZATION OF A CAR SUSPENSION–STEERING LINKAGESantiago UrgilesNo ratings yet
- Design and Analysis of The Drivetrain System For Formula SAE Race CarDocument24 pagesDesign and Analysis of The Drivetrain System For Formula SAE Race Carpreejaiswal0% (1)
- Zeorth ReviewDocument12 pagesZeorth Reviewhariprasathm01No ratings yet
- Dynamics of Vehicles With Controlled Limited-Slip DifferentialDocument108 pagesDynamics of Vehicles With Controlled Limited-Slip Differentialjaciel leonNo ratings yet
- Modelling The Evolution of Tyre Performance in A Motorsport ApplicationDocument79 pagesModelling The Evolution of Tyre Performance in A Motorsport ApplicationANDREA PALLOTTANo ratings yet
- Project Plan MORE Vehicle Regenerative Braking and Torque Vectoring FinalDocument24 pagesProject Plan MORE Vehicle Regenerative Braking and Torque Vectoring FinalYoussra Enst'Olympiens LaouinaNo ratings yet
- Robust Yaw Stability Controller Design and Hardware-In-The-Loop Testing For A Road VehicleDocument18 pagesRobust Yaw Stability Controller Design and Hardware-In-The-Loop Testing For A Road VehicleBejai Alexander MathewNo ratings yet
- Modeling and Simulation of an All-Wheel Drive MotorcycleDocument15 pagesModeling and Simulation of an All-Wheel Drive Motorcyclerenoir0079584No ratings yet
- Designing A Final Drive For A Tracked VehicleDocument9 pagesDesigning A Final Drive For A Tracked VehicleIroshana Thushara KiriwattuduwaNo ratings yet
- Design of Test RigDocument67 pagesDesign of Test RigSinisa BugarinNo ratings yet
- SR662Document38 pagesSR662BabulalSahuNo ratings yet
- Designing A Hydrogen Fuel Cell Powered Vehicle: To Compete The Shell Eco-MarathonDocument32 pagesDesigning A Hydrogen Fuel Cell Powered Vehicle: To Compete The Shell Eco-MarathonAhsan Ali100% (1)
- Truck Factor PDFDocument91 pagesTruck Factor PDFschavezlozano100% (1)
- Car Wheel Slip Modelling Simulation and Control Us PDFDocument4 pagesCar Wheel Slip Modelling Simulation and Control Us PDFThien MaiNo ratings yet
- Towards An All Wheel Drive Motorcycle DyDocument16 pagesTowards An All Wheel Drive Motorcycle DyYz ChenNo ratings yet
- Hybrid Go KartDocument182 pagesHybrid Go Kartpridhviraj100% (1)
- WheelModeling CFD MSCDocument78 pagesWheelModeling CFD MSCMatej TomićNo ratings yet
- Improving Vehicle Handling Behaviour With Active Toe-ControlDocument100 pagesImproving Vehicle Handling Behaviour With Active Toe-ControlPCezzzNo ratings yet
- Steering Characteristics in CorneringDocument12 pagesSteering Characteristics in CorneringNGUYEN MANNo ratings yet
- Design Project TwoDocument10 pagesDesign Project Twogeletayaadii100% (1)
- An Agent-Based Model To Simulate Motorcycle BehaviourDocument227 pagesAn Agent-Based Model To Simulate Motorcycle Behaviourhasib100% (6)
- Validation of ADMS/Car Simulations and Dynamic Performance in Multi-Link SuspensionsDocument56 pagesValidation of ADMS/Car Simulations and Dynamic Performance in Multi-Link SuspensionsRhaian BarrosNo ratings yet
- Modelling and Simulation of Automatic TransmissionDocument7 pagesModelling and Simulation of Automatic TransmissionIJRASETPublicationsNo ratings yet
- Modeling and Simulation 3Document13 pagesModeling and Simulation 3Umer Asfandyar BalghariNo ratings yet
- Identification and Assessment of A Simplified Model For Vehicle Ride SimulationDocument16 pagesIdentification and Assessment of A Simplified Model For Vehicle Ride SimulationpandiyarajmechNo ratings yet
- Tire and ModelisationDocument66 pagesTire and ModelisationChaker AmirNo ratings yet
- Transient Steering PDFDocument52 pagesTransient Steering PDFmdhyderaliNo ratings yet
- MSC Thesis FINAL - Anton StoopDocument104 pagesMSC Thesis FINAL - Anton Stoopkarlinhosmg100% (1)
- IJRR2005Document13 pagesIJRR2005Trương Quốc ĐạtNo ratings yet
- Dynamic Control of The 6WD Skid-Steering Mobile Robot RobuROC6Document6 pagesDynamic Control of The 6WD Skid-Steering Mobile Robot RobuROC6cticusorNo ratings yet
- A Comprehensive Wheel Terrain Contact MoDocument19 pagesA Comprehensive Wheel Terrain Contact MocticusorNo ratings yet
- Sailun PLT CATALOG 2019Document45 pagesSailun PLT CATALOG 2019cticusorNo ratings yet
- Hankook Pattern Digest 2013-2014 (Iso 29mb)Document187 pagesHankook Pattern Digest 2013-2014 (Iso 29mb)Nguyễn Hoài NamNo ratings yet
- Qs - 640u - 650u Quick StartDocument2 pagesQs - 640u - 650u Quick StartcticusorNo ratings yet
- VBOX 3i 100Hz GPS Data Logger: User GuideDocument46 pagesVBOX 3i 100Hz GPS Data Logger: User GuidecticusorNo ratings yet
- 2018 Michelin Data Book WebDocument100 pages2018 Michelin Data Book WebcticusorNo ratings yet
- USB-200 Series USB-200 Series: 12-Bit Multifunction DAQ DevicesDocument5 pagesUSB-200 Series USB-200 Series: 12-Bit Multifunction DAQ DevicescticusorNo ratings yet
- 640 650 Users ManualDocument100 pages640 650 Users ManualcticusorNo ratings yet
- 3DM GX3 35 - Datasheet - (8400 0034)Document2 pages3DM GX3 35 - Datasheet - (8400 0034)cticusorNo ratings yet
- IOtech Dasylab - GuideDocument76 pagesIOtech Dasylab - GuidecticusorNo ratings yet
- User's Guide: Analog and Digital I/ODocument20 pagesUser's Guide: Analog and Digital I/OcticusorNo ratings yet
- ISO TECH IPS 3303D Instruction ManualDocument56 pagesISO TECH IPS 3303D Instruction ManualcticusorNo ratings yet
- ISO TECH IPS 3303D Data SheetDocument2 pagesISO TECH IPS 3303D Data SheetcticusorNo ratings yet
- Service Manual: Publication NoDocument6 pagesService Manual: Publication NohamdaNo ratings yet
- Notam List As at 1st May 2018Document6 pagesNotam List As at 1st May 2018kevin mwanzaNo ratings yet
- Delta Port Imagebroschuere UkDocument20 pagesDelta Port Imagebroschuere UkOrxan TalibzadeNo ratings yet
- Supply Chain Activities and Designing Supply Chain NetworkDocument15 pagesSupply Chain Activities and Designing Supply Chain NetworkJyotiNo ratings yet
- Bearing PlatesDocument8 pagesBearing PlatesAhmad JuttNo ratings yet
- Learn How to Adjust Your New Kayak for Maximum Comfort and SafetyDocument20 pagesLearn How to Adjust Your New Kayak for Maximum Comfort and SafetydpforthNo ratings yet
- Traffic SignalDocument32 pagesTraffic SignalChitransh RajatNo ratings yet
- Guidelines For The Preparation of Cost Estimates For Traffic ManagementDocument2 pagesGuidelines For The Preparation of Cost Estimates For Traffic ManagementAlvin RazoNo ratings yet
- Pithauler Specifications PowertransDocument4 pagesPithauler Specifications PowertransMarc FluNo ratings yet
- LAW ENFORCEMENT ADMINISTRATION POLICE PATROLDocument145 pagesLAW ENFORCEMENT ADMINISTRATION POLICE PATROLRoxanne CalabonNo ratings yet
- United Kingdom - Industry ReportsDocument10 pagesUnited Kingdom - Industry ReportsWando OlukwendaNo ratings yet
- Valid From 01.01.2022 Wages in US$ Contract Duration ApplicableDocument1 pageValid From 01.01.2022 Wages in US$ Contract Duration ApplicableThornblad33No ratings yet
- C 05 - Seafarer Employment Application Form ABDUL RAHMANDocument4 pagesC 05 - Seafarer Employment Application Form ABDUL RAHMANSoekhaidir SuripnoNo ratings yet
- Morris Drywall Systems: Foreman's Daily Report: Foreman: Date: Weather: JobDocument1 pageMorris Drywall Systems: Foreman's Daily Report: Foreman: Date: Weather: JobMuhammad TaufikNo ratings yet
- Conceptual Design of A Business Jet Airc PDFDocument6 pagesConceptual Design of A Business Jet Airc PDFHamza TurhanNo ratings yet
- Libro 2Document1 pageLibro 2Pablo EduardoNo ratings yet
- Goodfellas (1990) ScriptDocument108 pagesGoodfellas (1990) ScriptAbelino Jara NavarreteNo ratings yet
- M/T Saracena: 20.500 DWT - Twin Screw Diesel Driven Oil Chemical Tanker Ice Class 1A - Rina ClassDocument2 pagesM/T Saracena: 20.500 DWT - Twin Screw Diesel Driven Oil Chemical Tanker Ice Class 1A - Rina ClasshalimNo ratings yet
- Development Control Norms For Group Housing Based On MPD 21.09.2021Document13 pagesDevelopment Control Norms For Group Housing Based On MPD 21.09.2021Ridhi Saxena100% (1)
- Manual de Partes Torre Allmand Nlpro II PDFDocument87 pagesManual de Partes Torre Allmand Nlpro II PDFEduardo Ariel BernalNo ratings yet
- The Chittagong Port Authority DATED: 22/03/2020Document4 pagesThe Chittagong Port Authority DATED: 22/03/2020S. M. Nazmul AlamNo ratings yet
- RENEWABLE ENERGY POLICIESDocument1 pageRENEWABLE ENERGY POLICIESVincs KongNo ratings yet
- A Tale of Survival American English TeacherDocument6 pagesA Tale of Survival American English TeacherWilliam OliveiraNo ratings yet
- Vehicle Specifications - LADA Vesta Sedan - LADA PDFDocument1 pageVehicle Specifications - LADA Vesta Sedan - LADA PDFCarlos Iran Benitez MedinaNo ratings yet
- NF22924108384258 InvoiceDocument2 pagesNF22924108384258 InvoiceAnonymous oQWqJ5OwZNo ratings yet
- Standard Propeller: Kongsberg Controllable Pitch PropellersDocument1 pageStandard Propeller: Kongsberg Controllable Pitch PropellersshejtemaeiNo ratings yet
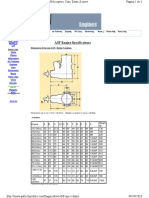
- ASP Engine SpecificationsDocument3 pagesASP Engine SpecificationsJose Fernando TrujilloNo ratings yet
- Graboplast ENG PDFDocument11 pagesGraboplast ENG PDFDurban Chamber of Commerce and IndustryNo ratings yet
- Billet PDF V2Document2 pagesBillet PDF V2Mahfooz AnamNo ratings yet
- Vehicle Inspection (Feb 2022)Document2 pagesVehicle Inspection (Feb 2022)Praveen NairNo ratings yet