You might also like
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- SonarDocument4 pagesSonarChickinNo ratings yet
- Detecting Obstacles and Warning - Arduino and UltrasonicDocument1 pageDetecting Obstacles and Warning - Arduino and UltrasonicZasni ZaxxNo ratings yet
- SMART Dustbin Materials and Making of ItDocument9 pagesSMART Dustbin Materials and Making of ItAbdallaNo ratings yet
- SensorforblindDocument2 pagesSensorforblindStanley RomeroNo ratings yet
- Arduino Theremin CodeDocument3 pagesArduino Theremin Codeluis.rochaNo ratings yet
- Tik Answers ??? ? ??Document4 pagesTik Answers ??? ? ??9484michaelNo ratings yet
- Detecting CarDocument1 pageDetecting Carsaksham hisariyaNo ratings yet
- Ultrasonic CodeDocument2 pagesUltrasonic CodeEmmanuel UwayoNo ratings yet
- Kecepatan SuaraDocument3 pagesKecepatan SuaraLulu Aeria 22No ratings yet
- Obstracle Detect CodDocument1 pageObstracle Detect CodVivek JadiyaNo ratings yet
- 05 Arduino Sensors, Motors and External InterruptsDocument20 pages05 Arduino Sensors, Motors and External InterruptsMalik Adil Farooq100% (2)
- Learn Arduino With TinkerCad - Day 2 PDFDocument21 pagesLearn Arduino With TinkerCad - Day 2 PDFS.M. Fazla RabbiNo ratings yet
- Adriano Program For Ultrasonic Sensor With MotorDocument2 pagesAdriano Program For Ultrasonic Sensor With MotorSirajChabruNo ratings yet
- Aurdino Remote CarDocument2 pagesAurdino Remote Car950321104030No ratings yet
- Arduino - Ultrasonic Sensor With LED's and BuzzerDocument3 pagesArduino - Ultrasonic Sensor With LED's and BuzzerFatihah OnnNo ratings yet
- Pengenali Motor DC Dengan Sensor UltrasonikDocument3 pagesPengenali Motor DC Dengan Sensor UltrasonikNovi CahyonoNo ratings yet
- Arduino Mesafe Sensör Ve SesDocument3 pagesArduino Mesafe Sensör Ve Sesseçkin acunNo ratings yet
- How To Set Up A Simple Piezo Speaker Circuit Using ArduinoDocument6 pagesHow To Set Up A Simple Piezo Speaker Circuit Using ArduinoMark lord bongatNo ratings yet
- Servo: Int Int Int Long LongDocument2 pagesServo: Int Int Int Long LongAkshat GuptaNo ratings yet
- Tech ME007 PDFDocument12 pagesTech ME007 PDFfredniels100% (2)
- Wall-E: Material RequirementDocument3 pagesWall-E: Material RequirementabhilashNo ratings yet
- AaaaDocument2 pagesAaaamejos72845No ratings yet
- Arduino and Rasp-Pi InterfacingDocument8 pagesArduino and Rasp-Pi InterfacingAbhishek KotkarNo ratings yet
- Arduino Sensor Code and ProcessingDocument4 pagesArduino Sensor Code and ProcessingGaVhaRiNo ratings yet
- Annex D: Automated Baby Walker Program For Ultrasonic Sensors and Servo MotorsDocument3 pagesAnnex D: Automated Baby Walker Program For Ultrasonic Sensors and Servo MotorsJeremy NicanorNo ratings yet
- BasureroDocument2 pagesBasureroenzoadan2023No ratings yet
- Assignment 01 Objective: Blinking 2 LED in A Time IntervalDocument20 pagesAssignment 01 Objective: Blinking 2 LED in A Time IntervalSaurabh ChoudharyNo ratings yet
- Kode ArduinoDocument4 pagesKode ArduinoNurul KharizatulNo ratings yet
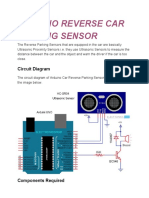
- Arduino Reverse Car Parking Sensor PDFDocument6 pagesArduino Reverse Car Parking Sensor PDFSaumya Thakur100% (1)
- RECULDocument2 pagesRECULFotcha EricNo ratings yet
- Tugas Mikrokontroler Dan Mikroprosesor Bobi Ardiansyah 145060301111055Document7 pagesTugas Mikrokontroler Dan Mikroprosesor Bobi Ardiansyah 145060301111055Rosihan Arby HarahapNo ratings yet
- DersDocument1 pageDersZumrud YusifzadeNo ratings yet
- Wiring / Connections: 1.problem StatementDocument4 pagesWiring / Connections: 1.problem Statementgouravdas08112002No ratings yet
- Arduino Code For Autometic BrekingDocument2 pagesArduino Code For Autometic BrekingUtsav YadavNo ratings yet
- Arduino and HC-SR04 Ultrasonic SensorDocument11 pagesArduino and HC-SR04 Ultrasonic SensorVarli ArsolNo ratings yet
- Chapter 7 and 8Document12 pagesChapter 7 and 8Amruta AvhaleNo ratings yet
- #Define Echopin 7 #Define Trigpin 8 #Define Ledpin 13: Int Int Long VoidDocument2 pages#Define Echopin 7 #Define Trigpin 8 #Define Ledpin 13: Int Int Long VoidMarcoAalexandrinoNo ratings yet
- Verilog Code For Seven Segment DisplayDocument5 pagesVerilog Code For Seven Segment DisplayAlfred LiNo ratings yet
- Speedometer DisplayDocument2 pagesSpeedometer Displaysaksham hisariyaNo ratings yet
- Ultrasonic and LED CodeDocument3 pagesUltrasonic and LED CodeGroove GamingNo ratings yet
- Senzori Blizine I UdaljenostiDocument5 pagesSenzori Blizine I UdaljenostiNevena TodosijevicNo ratings yet
- Practical 6Document7 pagesPractical 6Ayushi SavaniNo ratings yet
- Controls Reviewer 1Document6 pagesControls Reviewer 1John Mer ValdezNo ratings yet
- Expt-6 Ctrls De-Mesa Ferrer BalisiDocument12 pagesExpt-6 Ctrls De-Mesa Ferrer BalisiMatthew Dale BalisiNo ratings yet
- Alat Dan Bahan: 1 Arduino Uno 1 Sensor Ultrasonic SR04 2 Seven Segment Katoda 1 Breadboard Kabel JumperDocument9 pagesAlat Dan Bahan: 1 Arduino Uno 1 Sensor Ultrasonic SR04 2 Seven Segment Katoda 1 Breadboard Kabel JumperDhendy Dafeta MahardichaNo ratings yet
- Documento Sin TítuloDocument2 pagesDocumento Sin TítuloSantiago Maza Hern�ndezNo ratings yet
- Const Int EchopinDocument1 pageConst Int EchopinTeodora Iacob QwQNo ratings yet
- Automatic RainDocument4 pagesAutomatic Rainmahidej823No ratings yet
- Garaje Con Sensor de DistanciaDocument2 pagesGaraje Con Sensor de Distanciadiego gonzalezNo ratings yet
- Garaje Con Sensor de DistanciaDocument2 pagesGaraje Con Sensor de Distanciaga461703No ratings yet
- Ramos, Christian Audrey-Ultrasonic and LedDocument2 pagesRamos, Christian Audrey-Ultrasonic and LedMark Joseph FalcesoNo ratings yet
- Tesst 1 Iot Pet 3 FareezDocument9 pagesTesst 1 Iot Pet 3 FareezFareez Hakimi AmiruddinNo ratings yet
- ElectricidadDocument1 pageElectricidadraquelfloresticonaNo ratings yet
- Lab 4Document2 pagesLab 4Anthonio MakafuiNo ratings yet
- Garaje 2.0Document3 pagesGaraje 2.0Kevin GabrielNo ratings yet
- Drone CodingDocument3 pagesDrone CodingAbhishek KumarNo ratings yet
- Ultrasonic Sensor HC-SR04 and Arduino TutorialDocument5 pagesUltrasonic Sensor HC-SR04 and Arduino Tutorialmax100% (2)
- Garaje Con Sensor de DistanciaDocument2 pagesGaraje Con Sensor de Distanciadiego gonzalezNo ratings yet
- Python Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)From EverandPython Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Rating: 5 out of 5 stars5/5 (1)
- Clean Code: A Handbook of Agile Software CraftsmanshipFrom EverandClean Code: A Handbook of Agile Software CraftsmanshipRating: 5 out of 5 stars5/5 (13)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceFrom EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo ratings yet
- Once Upon an Algorithm: How Stories Explain ComputingFrom EverandOnce Upon an Algorithm: How Stories Explain ComputingRating: 4 out of 5 stars4/5 (43)
- Software Development: BCS Level 4 Certificate in IT study guideFrom EverandSoftware Development: BCS Level 4 Certificate in IT study guideRating: 3.5 out of 5 stars3.5/5 (2)
- How to Make a Video Game All By Yourself: 10 steps, just you and a computerFrom EverandHow to Make a Video Game All By Yourself: 10 steps, just you and a computerRating: 5 out of 5 stars5/5 (1)
- The Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!From EverandThe Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!Rating: 4.5 out of 5 stars4.5/5 (2)
- GAMEDEV: 10 Steps to Making Your First Game SuccessfulFrom EverandGAMEDEV: 10 Steps to Making Your First Game SuccessfulRating: 4.5 out of 5 stars4.5/5 (12)
- HTML, CSS, and JavaScript Mobile Development For DummiesFrom EverandHTML, CSS, and JavaScript Mobile Development For DummiesRating: 4 out of 5 stars4/5 (10)
- Mastering JavaScript: The Complete Guide to JavaScript MasteryFrom EverandMastering JavaScript: The Complete Guide to JavaScript MasteryRating: 5 out of 5 stars5/5 (1)
- The Ultimate Python Programming Guide For Beginner To IntermediateFrom EverandThe Ultimate Python Programming Guide For Beginner To IntermediateRating: 4.5 out of 5 stars4.5/5 (3)
- Coding for Kids Ages 9-15: Simple HTML, CSS and JavaScript lessons to get you started with Programming from ScratchFrom EverandCoding for Kids Ages 9-15: Simple HTML, CSS and JavaScript lessons to get you started with Programming from ScratchRating: 4.5 out of 5 stars4.5/5 (4)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerFrom EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerRating: 4.5 out of 5 stars4.5/5 (44)
- Narrative Design for Indies: Getting StartedFrom EverandNarrative Design for Indies: Getting StartedRating: 4.5 out of 5 stars4.5/5 (5)
- Blockchain: The complete guide to understanding Blockchain Technology for beginners in record timeFrom EverandBlockchain: The complete guide to understanding Blockchain Technology for beginners in record timeRating: 4.5 out of 5 stars4.5/5 (34)